STM32F411CE驱动Xbox摇杆
Posted 文某9
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32F411CE驱动Xbox摇杆相关的知识,希望对你有一定的参考价值。
外观
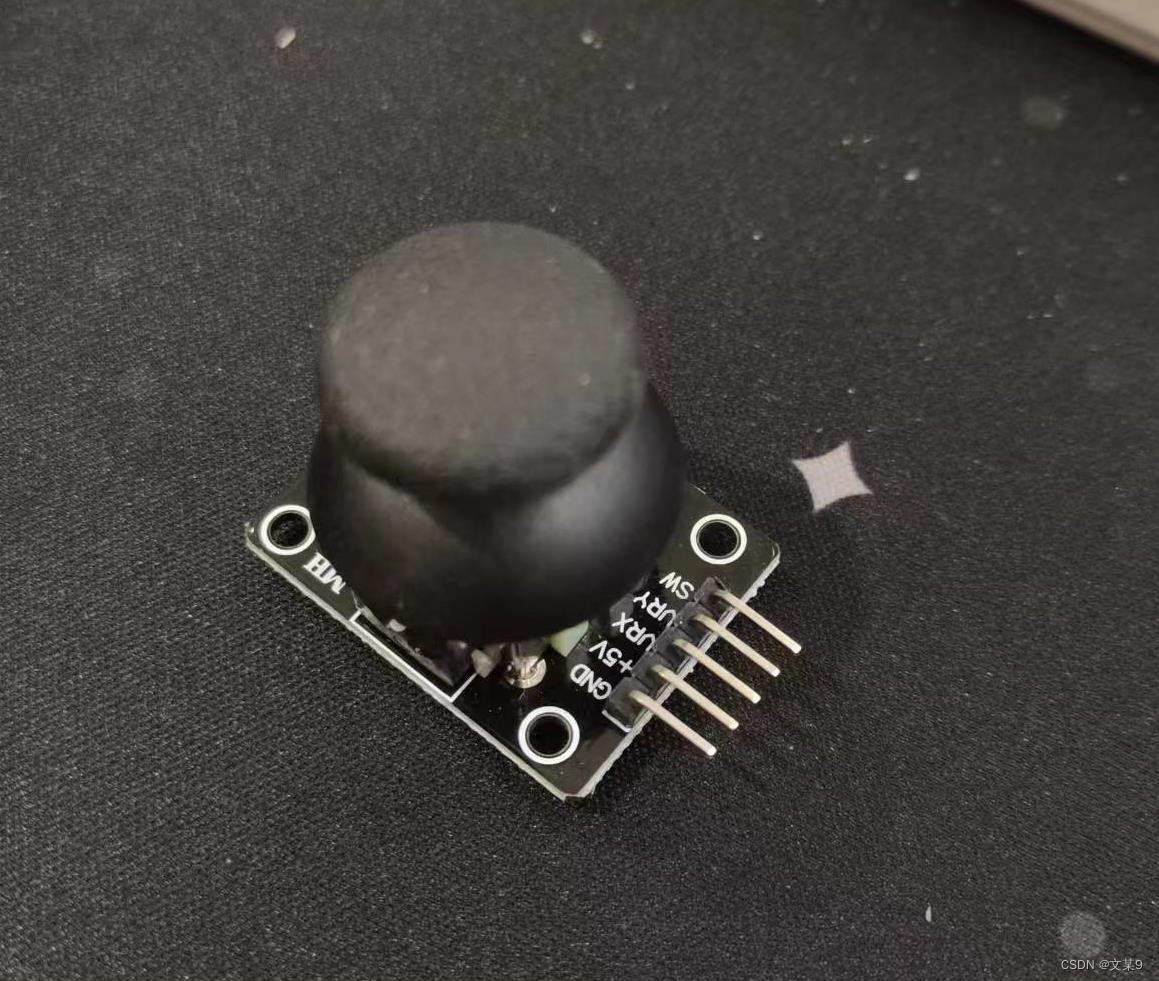
引脚说明和原理
GND-GND
5V-5V
VRX-ADC1通道1
VRX-ADC1通道2
SW独立按键-单片机的输入检测
本质上这个遥感就是集成了一个按键和两个电位器,遥感转动改变电位器也会转动,电压输出的值也就不一样,通过检测数值可自定义的做出判断,剩下的就是自己玩了
遥感不动电压值(XCOM串口助手输出)
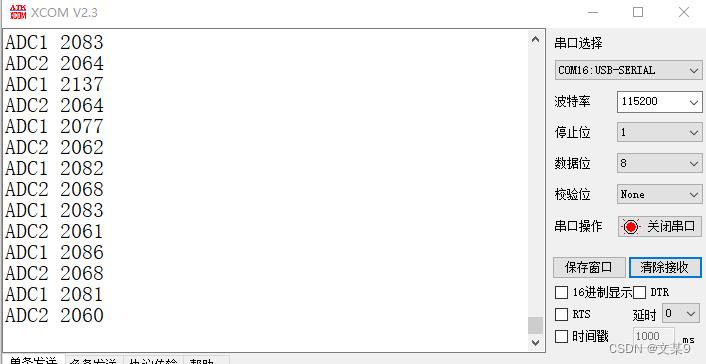
遥感转动电压值

为了ADC检测的实时性,检测采用ADC+DMA(连续方式)
adc.c(HAL库)
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file adc.c
* @brief This file provides code for the configuration
* of the ADC instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "adc.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
ADC_HandleTypeDef hadc1;
DMA_HandleTypeDef hdma_adc1;
/* ADC1 init function */
void MX_ADC1_Init(void)
/* USER CODE BEGIN ADC1_Init 0 */
/* USER CODE END ADC1_Init 0 */
ADC_ChannelConfTypeDef sConfig = 0;
/* USER CODE BEGIN ADC1_Init 1 */
/* USER CODE END ADC1_Init 1 */
/** Configure the global features of the ADC (Clock, Resolution, Data Alignment and number of conversion)
*/
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.ScanConvMode = ENABLE;
hadc1.Init.ContinuousConvMode = ENABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 2;
hadc1.Init.DMAContinuousRequests = ENABLE;
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
Error_Handler();
/** Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
*/
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_56CYCLES;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
Error_Handler();
/** Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
*/
sConfig.Channel = ADC_CHANNEL_1;
sConfig.Rank = 2;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
Error_Handler();
/* USER CODE BEGIN ADC1_Init 2 */
/* USER CODE END ADC1_Init 2 */
void HAL_ADC_MspInit(ADC_HandleTypeDef* adcHandle)
GPIO_InitTypeDef GPIO_InitStruct = 0;
if(adcHandle->Instance==ADC1)
/* USER CODE BEGIN ADC1_MspInit 0 */
/* USER CODE END ADC1_MspInit 0 */
/* ADC1 clock enable */
__HAL_RCC_ADC1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**ADC1 GPIO Configuration
PA0-WKUP ------> ADC1_IN0
PA1 ------> ADC1_IN1
*/
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* ADC1 DMA Init */
/* ADC1 Init */
hdma_adc1.Instance = DMA2_Stream4;
hdma_adc1.Init.Channel = DMA_CHANNEL_0;
hdma_adc1.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_adc1.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_adc1.Init.MemInc = DMA_MINC_ENABLE;
hdma_adc1.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_adc1.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_adc1.Init.Mode = DMA_CIRCULAR;
hdma_adc1.Init.Priority = DMA_PRIORITY_VERY_HIGH;
hdma_adc1.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_adc1) != HAL_OK)
Error_Handler();
__HAL_LINKDMA(adcHandle,DMA_Handle,hdma_adc1);
/* USER CODE BEGIN ADC1_MspInit 1 */
/* USER CODE END ADC1_MspInit 1 */
void HAL_ADC_MspDeInit(ADC_HandleTypeDef* adcHandle)
if(adcHandle->Instance==ADC1)
/* USER CODE BEGIN ADC1_MspDeInit 0 */
/* USER CODE END ADC1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_ADC1_CLK_DISABLE();
/**ADC1 GPIO Configuration
PA0-WKUP ------> ADC1_IN0
PA1 ------> ADC1_IN1
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_0|GPIO_PIN_1);
/* ADC1 DMA DeInit */
HAL_DMA_DeInit(adcHandle->DMA_Handle);
/* USER CODE BEGIN ADC1_MspDeInit 1 */
/* USER CODE END ADC1_MspDeInit 1 */
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
adc.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file adc.h
* @brief This file contains all the function prototypes for
* the adc.c file
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __ADC_H__
#define __ADC_H__
#ifdef __cplusplus
extern "C"
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
extern ADC_HandleTypeDef hadc1;
/* USER CODE BEGIN Private defines */
/* USER CODE END Private defines */
void MX_ADC1_Init(void);
/* USER CODE BEGIN Prototypes */
/* USER CODE END Prototypes */
#ifdef __cplusplus
#endif
#endif /* __ADC_H__ */
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "dma.h"
#include "usart.h"
#include "gpio.h"
#include "stdio.h"
#include "string.h"
#define HUART1 1 // 串口1开关
#define HUART2 1 // 串口2开关
#define HUART3 1 // 串口3开关
#define BUFF 512
static char HUART_BUFF[BUFF];
#if HUART1
#define printf(FORMAT,...) \\
\\
memset(HUART_BUFF, 0, BUFF);\\
sprintf(HUART_BUFF,FORMAT,##__VA_ARGS__); \\
HAL_UART_Transmit(&huart1,(uint8_t *)HUART_BUFF,strlen(HUART_BUFF), 1);\\
#else
#define printf(FORMAT,...)
#endif
#if HUART2
#define printf2(FORMAT,...) \\
\\
memset(HUART_BUFF, 0, BUFF);\\
sprintf(HUART_BUFF,FORMAT,##__VA_ARGS__); \\
HAL_UART_Transmit(&huart2,(uint8_t *)HUART_BUFF,strlen(HUART_BUFF), 1);\\
#else
#define printf2(FORMAT,...)
#endif
#if HUART3
#define printf3(FORMAT,...) \\
\\
memset(HUART_BUFF, 0, BUFF);\\
sprintf(HUART_BUFF,FORMAT,##__VA_ARGS__); \\
HAL_UART_Transmit(&huart3,(uint8_t *)HUART_BUFF,strlen(HUART_BUFF), 1);\\
#else
#define printf3(FORMAT,...)
#endif
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
uint16_t adcbuf[2]=0;
int main(void)
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_ADC1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_ADC_Start_DMA(&hadc1,(uint32_t*)adcbuf,2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
/* USER CODE END WHILE */
printf("ADC1 %d\\r\\n",adcbuf[0]);
printf("ADC2 %d\\r\\n",adcbuf[1]);
HAL_Delay(500);
/* USER CODE BEGIN 3 */
/* USER CODE END 3 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
RCC_OscInitTypeDef RCC_OscInitStruct = 0;
RCC_ClkInitTypeDef RCC_ClkInitStruct = 0;
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 100;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
Error_Handler();
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
Error_Handler();
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
/* USER CODE END Error_Handler_Debug */
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\\r\\n", file, line) */
/* USER CODE END 6 */
#endif /* USE_FULL_ASSERT */
代码评论区获取 喝茶聊天技术交流 721421120
以上是关于STM32F411CE驱动Xbox摇杆的主要内容,如果未能解决你的问题,请参考以下文章