51单片机运用can总线的通信协议 急!!!!!!!!!!
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了51单片机运用can总线的通信协议 急!!!!!!!!!!相关的知识,希望对你有一定的参考价值。
51单片机上用的是can总线(要求支持300米以上的数据传输)那么他的上位机和下位机的通信协议应该怎么写?
还有支持二线传输数据线除了用can总线还可以用什么数据线?(要求支持300米以上的数据传输)我用的是51单片机
如果用别的数据线做51单片机(要求支持300米以上的数据传输)那么也给出其通信协议。
谢谢
CAN全称为Controller Area Network,即控制器局域网,由德国Bosch公司最先提出,是国际上应用最广泛的现场总线之一。最初CAN 被设计作为汽车环境中的通讯,在汽车电子控制装置之间交换信息形成汽车电子控制网络。由于其卓越的性能、极高的可靠性和低廉的价格现已广泛应用于工业现场控制、医疗仪器等众多领域[1][2]。
CAN协议是建立在OSI 7层开放互连参考模型基础之上的。但CAN协议只定义了模型的最下面两层:数据链路层和物理层,仅保证了节点间无差错的数据传输。CAN的应用层协议必须由CAN 用户自行定义,或采用一些国际组织制订的标准协议。应用最为广泛的是DeviceNet和CANopen,分别广泛应用于过程控制和机电控制领域。但此类协议一般结构比较复杂,更适合复杂大型系统的应用。笔者在研制一种基于CAN总线的分布式高频开关电源充电机系统的过程中设计了一种适合于小型控制系统的CAN总线高层通信协议。
2 CAN的特点[3]
CAN 是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率、抗电磁干扰性,而且要能够检测出总线的任何错误。当信号传输距离达10km时,CAN仍可提供高达50kbps 的数据传输速率。
CAN具有十分优越的特点:
(1) 较低的成本与极高的总线利用率;
(2) 数据传输距离可长达10km,传输速率可高达1Mbps[7];
(3) 可靠的错误处理和检错机制,发送的信息遭到破坏后可自动重发;
(4) 节点在错误严重的情况下具有自动退出总线的功能;
(5) 报文不包含源地址或目标地址,仅用标志符来指示功能信息和优先级信息。
3 CAN的技术规范
(1) 帧类型
在CAN总线中,有四种不同的帧类型[4][5]:
·数据帧(Data Frame) 数据帧带有应用数据;
·远程帧(Remote Frame) 通过发送远程帧可以向网络请求数据,启动其他资源节点传送他们各自的数据,远程帧包含6个不同的位域:帧起始、仲裁域、控制域、CRC域、应答域、帧结尾。仲裁域中的RTR位的隐极性表示为远程帧;
·错误帧(Error Frame)错误帧能够报告每个节点的出错,由两个不同的域组成,第一个域是不同站提供的错误标志的叠加,第二个域是错误界定符;
·过载帧(Overload Frame)如果节点的接收尚未准备好就会传送过载帧,由两个不同的域组成,第一个域是过载标志,第二个域是过载界定符。
(2) 数据帧结构
数据帧由以下7个不同的位域(Bit Field)组成:帧起始、仲裁域、控制域、数据域、CRC域、应答域、帧结尾。其标准帧结构如表1所示:
表1 数据帧的结构[4]
·帧起始:标志帧的开始,它由单个显性位构成,在总线空闲时发送,在总线上产生同步作用。
·仲裁域:由11位标识符(ID10-ID0)和远程发送请求位(RTR)组成,RTR位为显性表示该帧为数据帧,隐性表示该帧为远程帧;标识符由高至低按次序发送,且前7位 (ID10-ID4)不能全为显性位。标识符ID用来描述数据的含义而不用于通信寻址,CAN总线的帧是没有寻址功能的。标识符还用于决定报文的优先权,ID值越低优先权越高,在竞争总线时,优先权高的报文优先发送,优先权低报文退出总线竞争。CAN总线竞争的算法效率很高,是一种非破坏性竞争。
·控制域:为数据长度码 (DLC3-DLC0),表示数据域中数据的字节数,不得超过8。
·数据域:由被发送数据组成,数目与控制域中设定的字节数相等,第一个字节的最高位首先被发送。其长度在标准帧中不超过8个字节。
·CRC域:包括CRC(循环冗余码校验)序列(15位)和CRC界定符(1个隐性位),用于帧校验。
l应答域:由应答间隙和应答界定符组成,共两位;发送站发送两个隐性位,接收站在应答间隙中发送显性位。应答界定符必须是隐性位。
·帧结束:由7位隐性位组成。
4 自订CAN高层协议
CAN的高层协议也可理解为应用层协议,是一种在现有的底层协议(物理层和数据链路层)之上实现的协议。由于充电机系统的结构比较简单,网络规模也比较小。因此我们自行制订了一种简单而有效的高层通信协议。
技术规范CAN2.0A规定标准的数据帧有11位标识符,用户可以自行规定其含义,将所需要的信息包含在内。在充电机系统中,每一个节点都有一个唯一的地址,地址码和模块一一对应,通过拨码开关设定,总线上数据的传送也是根据地址进行的。由于本系统规模较小,节点数少于32个,因此为每个模块分配一个5位的地址码,同一系统中地址码不得重复,系统初始化时由外部引脚读入。将标识符ID9-ID5定义为源地址,ID4-ID0定义为目的地址,本协议中从模块的目的地址全填0,表示数据是广播数据,所有节点都可接收,主模块中目的地址根据要进行通信目的模块的地址确定。本通信协议的数据帧格式详见表2。
表2 数据帧格式
理论上源地址和目的地址的范围都是0~31,但由于CAN协议中规定标识符前7位不能全为显性位,所以源地址不能为31,这时实际节点只有31个(0~30)。因此每个系统所含的模块不超过31个。所以源地址和目的地址的范围缩减到0~30。同时上位监控机也要占用一个地址,因此系统中的电源模块不超过30个,设计时根据节点的优先权高低从小到大分配节点地址。ID10位定义为主模块识别码,该位主模块为隐性位,从模块为显性位,以保证主模块通信优先。模块的地址码决定发送数据的优先级。主模块向总线发送的数据有两种:一种是目的地址全部填0的广播数据;另一种是包含特定目的地址的非广播数据。
协议中一帧数据最多能传送8个字节,对于充电机控制系统来说已经足够用了,本系统只用到其中的前5个字节,其余3个节字可用于以后的扩展使用,因此未定义多帧传输方式。
从模块以广播形式向总线发送数据,同时回收自己发送的数据,若检测到所发送与所收到的数据不符,则立即重新发送上一帧数据。从模块发送信息的顺序由主模块的发出的指令决定,以免在总线通信繁忙时优先级较低的模块始终得不到总线通信权。指令的发送顺序按照各从模块的地址顺序进行,即地址较低的从模块首先获得指令,得以发送自己的地址码和电流、温度采样值。如发生冲突,则由CAN控制器自动根据模块的优先级调整发送顺序,在CAN的底层协议中有完善的优先级仲裁算法,因此应用层协议不必考虑此类问题。
对于每个模块,上电1s后若未收到任何通信信息,则按计算延时发送自身的地址码和温度电流采样值。延时时间的计算为[6]:
tdelay=T×ADD
其中:tdelay-为延时发送时间;
T-为单位延时时间常数,该值根据通信速率定义;可以取1个位周期,在波特率为100kHz时为10μs;
ADD-为模块地址编码。
主模块是ID10=0的模块,因此具有最高的优先级。上电后主模块首先向总线广播发送自身的地址码和温度电流采样值,然后即按顺序向从机发送指令,等待从机的回答。主机1秒钟后若未收到任何通信信息则认为该模块出错,发出报警。同样从机1s后若未收到主机任何通信信息则认为主机出错,按照源地址优先级由其余模块中地址最低的模块充当主模块,并将其ID10由1改为0,以获得最高通信优先权。
各模块检测到自身故障时,将切断输出,退出通信,并向上位机报警,同时发出声光报警。
5 结束语
本文中所介绍的CAN高层通信协议,结构简单、使用灵活、可靠性极高,实现也比较容易。很适合在节点数不多、通信可靠性要求高、控制结构较简单的小型控制系统中应用,具有一定的实用价值 参考技术A CAN线不要太长.可能出的问题就是出在你的线问题上,最多就1米的数据传输.还有就是ADD-模块地址编码。如果要解决的话就测到自身故障时,将切断输出,退出通信,并向上位机报警,同时发出声光报警.自订CAN高层协议问题,解决的办法就是:规范CAN2.0A规定标准的数据帧有11位标识符,用户可以自行规定其含义,将所需要的信息包含在内。在充电机系统中,每一个节点都有一个唯一的地址,地址码和模块一一对应,通过拨码开关设定,总线上数据的传送也是根据地址进行的。由于本系统规模较小,节点数少于32个,因此为每个模块分配一个5位的地址码,同一系统中地址码不得重复,系统初始化时由外部引脚读入。将标识符ID9-ID5定义为源地址,ID4-ID0定义为目的地址,本协议中从模块的目的地址全填0,表示数据是广播数据,所有节点都可接收,主模块中目的地址根据要进行通信目的模块的地址确定
这样的情况出现还不好的话,兄弟.换了吧.没有办法了, 参考技术B 我做过最多就1米的数据传输,没有做过300米的 参考技术C 首先canbus是问答式的通讯方式报文最大长度11char
1仲裁场(共12位)
bit10 bit9 bit8 bit7 bit6
功能编码
bit5 bit4 bit3
目的地址
bit2 bit1 bit0
源插地址
RTR
远程帧
2.控制场
IDE r0 DL3 DL2 DL1 DL0
0 0 数据长度
3.数据场
bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit0
数据帧数据(最长8组)
应答时仲裁场目的地址源地址交换,就是目的地址就是你回答的询问报文中的原地址,当然原地址就是你地址 485总线的通讯距离也在300m以上!485的通讯协议比较灵活!可以自己定值问答式协议!可参考通讯中常用的同步头+数据长度+效验的格式自己设计,
例如:采用0xeb 0x90 同步头
可以给你一份我做过的协议!自己分析一下!不明白给我发邮件!llzyong@sohu.com本回答被提问者采纳 参考技术D 到这了看看把
很全
不知道.看看高手怎么回答?
Linux mysql 找不到 uuid ,急急急
但是做同步有错误:
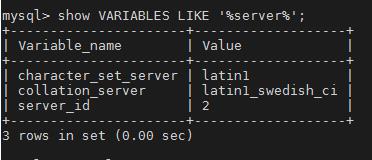
Last_IO_Errno: 1593
Last_IO_Error: Fatal error: The slave I/O thread stops because master and slave have equal MySQL server ids; these ids must be different for replication to work (or the --replicate-same-server-id option must be used on slave but this does not always make sense; please check the manual before using it).
并且找不到$datadir/auto.cnf
求解求解啊!!!!
如果是,我把一些关键点给你说下。
1、主节点需要开启二进制日志文件(bin_log)、需要指明server_id
2、从节点需要开启中继日志(relay_log)、需要开启只读(read_only=ON)、需要指明server_id
3、主从配置文件中都写上
innodb_file_per_table = ON:每张表使用单独的存储空间
skip_name_resolve :禁止解析主机名,centos6不用指明'ON',centos7需要指明
datadir=/path/to/data:指明存储数据路径,默认的是'/var/lib/mysql/'
需要注意的是:
1、主从节点的serber_id一定不能相同,看了楼主的截图,应该是server_id问题
2、mysql存储数据路径的属主、属组一定要是mysql用户,需要权限写入数据 参考技术A server-id=10
不能一样
以上是关于51单片机运用can总线的通信协议 急!!!!!!!!!!的主要内容,如果未能解决你的问题,请参考以下文章