nfc hal分析
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了nfc hal分析相关的知识,希望对你有一定的参考价值。
参考技术A androidXRef 真是绝好的在线工具。在整个/system/nfc目录下都没有对mHal的初始化,在该目录下所有mHal的相关操作都是调用其内部函数
故猜测mHal为Nfc的Hal层接口。
在整个目录下没有INfc的c或者cpp文件,仅存在INfc.hal。猜测aidl文件功能类似,看google android hal
文档。发现会通过hidl-gen根据INfc.hal自动生成INfc.h,BpNfc.h,NfcAll.cpp,BnNfc.h,iHwNfc.h
查看INfc.hal:
open:打开NFCC设备并准备好接受write命令进一步初始化。
write:将写入内容放入queue中并立即初始化。
coreInitialized:在接受到来自NFCC的CORE_INIT_RSP后被调用。随即等待NfcEvent.POST_INIT_CPLT
prediscover:在每次开始RF discovering时都会被调用,在这里做固件相关的配置
powerCycle:通过power cycle重启controller。
定义了struct Nfc,派生自INfc,定义了open,write等成员函数,静态函数eventCall,dataCallback,
内部成员mCallback,mDevice
该文件中的对INfc.hal中的文件中open, write等进行实现。HIDL_FETCH_INfc是外部模块获取Nfc结构体的方法
它内部实现了获取mDevice的方式:hw_get_module(这是hw内部管理hal的接口)。
该文件是hidl-gen自动生成的。mHal有成员函数getService
主要关注上述的hw_get_module如何实现
hw_get_module为接口,内部由hw_get_module_by_class实现。内部查找class_id所对应动态库路径,调用load加载
,在load内部用dlopen打开。用dlsym找到HMI符号所对应模块。
android6.0源码分析之Camera2 HAL分析
在上一篇文章对Camera API2.0的框架进行了简单的介绍,其中Camera HAL屏蔽了底层的实现细节,并且为上层提供了相应的接口,具体的HAL的原理,个人觉得老罗的文章Android硬件抽象层(HAL)概要介绍和学习计划分析的很详细,这里不做分析,本文将只分析Camera HAL的初始化等相关流程。
以下是Camera2的相关文章目录:
android6.0源码分析之Camera API2.0简介
android6.0源码分析之Camera2 HAL分析
android6.0源码分析之Camera API2.0下的初始化流程分析
android6.0源码分析之Camera API2.0下的Preview(预览)流程分析
android6.0源码分析之Camera API2.0下的Capture流程分析
android6.0源码分析之Camera API2.0下的video流程分析
Camera API2.0的应用
1、Camera HAL的初始化
Camera HAL的初始加载是在Native的CameraService初始化流程中的,而CameraService初始化是在Main_mediaServer.cpp的main方法开始的:
//Main_mediaServer.cpp
int main(int argc __unused, char** argv)
…
sp<ProcessState> proc(ProcessState::self());
//获取ServieManager
sp<IServiceManager> sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
AudioFlinger::instantiate();
//初始化media服务
MediaPlayerService::instantiate();
//初始化资源管理服务
ResourceManagerService::instantiate();
//初始化Camera服务
CameraService::instantiate();
//初始化音频服务
AudioPolicyService::instantiate();
SoundTriggerHwService::instantiate();
//初始化Radio服务
RadioService::instantiate();
registerExtensions();
//开始线程池
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
其中,CameraService继承自BinderService,instantiate也是在BinderService中定义的,此方法就是调用publish方法,所以来看publish方法:
// BinderService.h
static status_t publish(bool allowIsolated = false)
sp<IServiceManager> sm(defaultServiceManager());
//将服务添加到ServiceManager
return sm->addService(String16(SERVICE::getServiceName()),new SERVICE(), allowIsolated);
这里,将会把CameraService服务加入到ServiceManager进行管理。
而在前面的文章android6.0源码分析之Camera API2.0简介中,需要通过Java层的IPC Binder来获取此CameraService对象,在此过程中会初始CameraService的sp类型的对象,而对于sp,此处不做过多的分析,具体的可以查看深入理解Android卷Ⅰ中的第五章中的相关内容。此处,在CameraService的构造时,会调用CameraService的onFirstRef方法:
//CameraService.cpp
void CameraService::onFirstRef()
BnCameraService::onFirstRef();
...
camera_module_t *rawModule;
//根据CAMERA_HARDWARE_MODULE_ID(字符串camera)来获取camera_module_t对象
int err = hw_get_module(CAMERA_HARDWARE_MODULE_ID,
(const hw_module_t **)&rawModule);
//创建CameraModule对象
mModule = new CameraModule(rawModule);
//模块初始化
err = mModule->init();
...
//通过Module获取Camera的数量
mNumberOfCameras = mModule->getNumberOfCameras();
mNumberOfNormalCameras = mNumberOfCameras;
//初始化闪光灯
mFlashlight = new CameraFlashlight(*mModule, *this);
status_t res = mFlashlight->findFlashUnits();
int latestStrangeCameraId = INT_MAX;
for (int i = 0; i < mNumberOfCameras; i++)
//初始化CameraID
String8 cameraId = String8::format("%d", i);
struct camera_info info;
bool haveInfo = true;
//获取Camera信息
status_t rc = mModule->getCameraInfo(i, &info);
...
//如果Module版本高于2.4,找出冲突的设备参数
if (mModule->getModuleApiVersion() >= CAMERA_MODULE_API_VERSION_2_4 && haveInfo)
cost = info.resource_cost;
conflicting_devices = info.conflicting_devices;
conflicting_devices_length = info.conflicting_devices_length;
//将冲突设备加入冲突set集中
std::set<String8> conflicting;
for (size_t i = 0; i < conflicting_devices_length; i++)
conflicting.emplace(String8(conflicting_devices[i]));
...
//如果Module的API大于2.1,则设置回调
if (mModule->getModuleApiVersion() >= CAMERA_MODULE_API_VERSION_2_1)
mModule->setCallbacks(this);
//若大于2.2,则设置供应商的Tag
if (mModule->getModuleApiVersion() >= CAMERA_MODULE_API_VERSION_2_2)
setUpVendorTags();
//将此服务注册到CameraDeviceFactory
CameraDeviceFactory::registerService(this);
CameraService::pingCameraServiceProxy();
onFirstRef方法中,首先会通过HAL框架的hw_get_module来获取CameraModule对象,然后会对其进行相应的初始化,并会进行一些参数的设置,如camera的数量,闪光灯的初始化,以及回调函数的设置等,到这里,Camera2 HAL的模块就初始化结束了,下面给出初始化时序图:

2、Camera HAL的open流程分析
通过阅读android6.0源码发现,它提供了高通的Camera实现,并且提供了高通的Camera库,也实现了高通的Camera HAL的相应接口,对于高通的Camera,它在后台会有一个守护进程daemon,daemon是介于应用和驱动之间翻译ioctl的中间层(委托处理)。本节将以Camera中的open流程为例,来分析Camera HAL的工作过程,在应用对硬件发出open请求后,会通过Camera HAL来发起open请求,而Camera HAL的open入口在QCamera2Hal.cpp进行了定义:
//QCamera2Hal.cpp
camera_module_t HAL_MODULE_INFO_SYM =
//它里面包含模块的公共方法信息
common: camera_common,
get_number_of_cameras: qcamera::QCamera2Factory::get_number_of_cameras,
get_camera_info: qcamera::QCamera2Factory::get_camera_info,
set_callbacks: qcamera::QCamera2Factory::set_callbacks,
get_vendor_tag_ops: qcamera::QCamera3VendorTags::get_vendor_tag_ops,
open_legacy: qcamera::QCamera2Factory::open_legacy,
set_torch_mode: NULL,
init : NULL,
reserved: 0
;
static hw_module_t camera_common =
tag: HARDWARE_MODULE_TAG,
module_api_version: CAMERA_MODULE_API_VERSION_2_3,
hal_api_version: HARDWARE_HAL_API_VERSION,
id: CAMERA_HARDWARE_MODULE_ID,
name: "QCamera Module",
author: "Qualcomm Innovation Center Inc",
//它的方法数组里绑定了open接口
methods: &qcamera::QCamera2Factory::mModuleMethods,
dso: NULL,
reserved: 0
;
struct hw_module_methods_t QCamera2Factory::mModuleMethods =
//open方法的绑定
open: QCamera2Factory::camera_device_open,
;Camera HAL层的open入口其实就是camera_device_open方法:
// QCamera2Factory.cpp
int QCamera2Factory::camera_device_open(const struct hw_module_t *module, const char *id,
struct hw_device_t **hw_device)
...
return gQCamera2Factory->cameraDeviceOpen(atoi(id), hw_device);
它调用了cameraDeviceOpen方法,而其中的hw_device就是最后要返回给应用层的CameraDeviceImpl在Camera HAL层的对象,继续分析cameraDeviceOpen方法:
// QCamera2Factory.cpp
int QCamera2Factory::cameraDeviceOpen(int camera_id, struct hw_device_t **hw_device)
...
//Camera2采用的Camera HAL版本为HAL3.0
if ( mHalDescriptors[camera_id].device_version == CAMERA_DEVICE_API_VERSION_3_0 )
//初始化QCamera3HardwareInterface对象,这里构造函数里将会进行configure_streams以及
//process_capture_result等的绑定
QCamera3HardwareInterface *hw = new QCamera3HardwareInterface(
mHalDescriptors[camera_id].cameraId, mCallbacks);
//通过QCamera3HardwareInterface来打开Camera
rc = hw->openCamera(hw_device);
...
else if (mHalDescriptors[camera_id].device_version == CAMERA_DEVICE_API_VERSION_1_0)
//HAL API为2.0
QCamera2HardwareInterface *hw = new QCamera2HardwareInterface((uint32_t)camera_id);
rc = hw->openCamera(hw_device);
...
else
...
return rc;
此方法有两个关键点:一个是QCamera3HardwareInterface对象的创建,它是用户空间与内核空间进行交互的接口;另一个是调用它的openCamera方法来打开Camera,下面将分别进行分析。
2.1 QCamera3HardwareInterface构造函数分析
在它的构造函数里面有一个关键的初始化,即mCameraDevice.ops = &mCameraOps,它会定义Device操作的接口:
//QCamera3HWI.cpp
camera3_device_ops_t QCamera3HardwareInterface::mCameraOps =
initialize: QCamera3HardwareInterface::initialize,
//配置流数据的相关处理
configure_streams: QCamera3HardwareInterface::configure_streams,
register_stream_buffers: NULL,
construct_default_request_settings:
QCamera3HardwareInterface::construct_default_request_settings,
//处理结果的接口
process_capture_request:
QCamera3HardwareInterface::process_capture_request,
get_metadata_vendor_tag_ops: NULL,
dump: QCamera3HardwareInterface::dump,
flush: QCamera3HardwareInterface::flush,
reserved: 0,
; 其中,会在configure_streams中配置好流的处理handle:
//QCamera3HWI.cpp
int QCamera3HardwareInterface::configure_streams(const struct camera3_device *device,
camera3_stream_configuration_t *stream_list)
//获得QCamera3HardwareInterface对象
QCamera3HardwareInterface *hw =reinterpret_cast<QCamera3HardwareInterface *>(device->priv);
...
//调用它的configureStreams进行配置
int rc = hw->configureStreams(stream_list);
..
return rc;
继续追踪configureStream方法:
//QCamera3HWI.cpp
int QCamera3HardwareInterface::configureStreams(camera3_stream_configuration_t *streamList)
...
//初始化Camera版本
al_version = CAM_HAL_V3;
...
//开始配置stream
...
//初始化相关Channel为NULL
if (mMetadataChannel)
delete mMetadataChannel;
mMetadataChannel = NULL;
if (mSupportChannel)
delete mSupportChannel;
mSupportChannel = NULL;
if (mAnalysisChannel)
delete mAnalysisChannel;
mAnalysisChannel = NULL;
//创建Metadata Channel,并对其进行初始化
mMetadataChannel = new QCamera3MetadataChannel(mCameraHandle->camera_handle,
mCameraHandle->ops, captureResultCb,&gCamCapability[mCameraId]->padding_info,
CAM_QCOM_FEATURE_NONE, this);
...
//初始化
rc = mMetadataChannel->initialize(IS_TYPE_NONE);
...
//如果h/w support可用,则创建分析stream的Channel
if (gCamCapability[mCameraId]->hw_analysis_supported)
mAnalysisChannel = new QCamera3SupportChannel(mCameraHandle->camera_handle,
mCameraHandle->ops,&gCamCapability[mCameraId]->padding_info,
CAM_QCOM_FEATURE_PP_SUPERSET_HAL3,CAM_STREAM_TYPE_ANALYSIS,
&gCamCapability[mCameraId]->analysis_recommended_res,this);
...
bool isRawStreamRequested = false;
//清空stream配置信息
memset(&mStreamConfigInfo, 0, sizeof(cam_stream_size_info_t));
//为requested stream分配相关的channel对象
for (size_t i = 0; i < streamList->num_streams; i++)
camera3_stream_t *newStream = streamList->streams[i];
uint32_t stream_usage = newStream->usage;
mStreamConfigInfo.stream_sizes[mStreamConfigInfo.num_streams].width = (int32_t)newStream-
>width;
mStreamConfigInfo.stream_sizes[mStreamConfigInfo.num_streams].height = (int32_t)newStream-
>height;
if ((newStream->stream_type == CAMERA3_STREAM_BIDIRECTIONAL||newStream->usage &
GRALLOC_USAGE_HW_CAMERA_ZSL) &&newStream->format ==
HAL_PIXEL_FORMAT_IMPLEMENTATION_DEFINED && jpegStream)
mStreamConfigInfo.type[mStreamConfigInfo.num_streams] = CAM_STREAM_TYPE_SNAPSHOT;
mStreamConfigInfo.postprocess_mask[mStreamConfigInfo.num_streams] =
CAM_QCOM_FEATURE_NONE;
else if(newStream->stream_type == CAMERA3_STREAM_INPUT)
else
switch (newStream->format)
//为非zsl streams查找他们的format
...
if (newStream->priv == NULL)
//为新的stream构造Channel
switch (newStream->stream_type) //分类型构造
case CAMERA3_STREAM_INPUT:
newStream->usage |= GRALLOC_USAGE_HW_CAMERA_READ;
newStream->usage |= GRALLOC_USAGE_HW_CAMERA_WRITE;//WR for inplace algo's
break;
case CAMERA3_STREAM_BIDIRECTIONAL:
...
break;
case CAMERA3_STREAM_OUTPUT:
...
break;
default:
break;
//根据前面的得到的stream的参数类型以及format分别对各类型的channel进行构造
if (newStream->stream_type == CAMERA3_STREAM_OUTPUT ||
newStream->stream_type == CAMERA3_STREAM_BIDIRECTIONAL)
QCamera3Channel *channel = NULL;
switch (newStream->format)
case HAL_PIXEL_FORMAT_IMPLEMENTATION_DEFINED:
/* use higher number of buffers for HFR mode */
...
//创建Regular Channel
channel = new QCamera3RegularChannel(mCameraHandle->camera_handle,
mCameraHandle->ops, captureResultCb,&gCamCapability[mCameraId]-
>padding_info,this,newStream,(cam_stream_type_t)mStreamConfigInfo.type[
mStreamConfigInfo.num_streams],mStreamConfigInfo.postprocess_mask[
mStreamConfigInfo.num_streams],mMetadataChannel,numBuffers);
...
newStream->max_buffers = channel->getNumBuffers();
newStream->priv = channel;
break;
case HAL_PIXEL_FORMAT_YCbCr_420_888:
//创建YWV Channel
...
break;
case HAL_PIXEL_FORMAT_RAW_OPAQUE:
case HAL_PIXEL_FORMAT_RAW16:
case HAL_PIXEL_FORMAT_RAW10:
//创建Raw Channel
...
break;
case HAL_PIXEL_FORMAT_BLOB:
//创建QCamera3PicChannel
...
break;
default:
break;
else if (newStream->stream_type == CAMERA3_STREAM_INPUT)
newStream->max_buffers = MAX_INFLIGHT_REPROCESS_REQUESTS;
else
for (List<stream_info_t*>::iterator it=mStreamInfo.begin();it != mStreamInfo.end();
it++)
if ((*it)->stream == newStream)
(*it)->channel = (QCamera3Channel*) newStream->priv;
break;
else
if (newStream->stream_type != CAMERA3_STREAM_INPUT)
mStreamConfigInfo.num_streams++;
if (isZsl)
if (mPictureChannel)
mPictureChannel->overrideYuvSize(zslStream->width, zslStream->height);
else if (mPictureChannel && m_bIs4KVideo)
mPictureChannel->overrideYuvSize(videoWidth, videoHeight);
//RAW DUMP channel
if (mEnableRawDump && isRawStreamRequested == false)
cam_dimension_t rawDumpSize;
rawDumpSize = getMaxRawSize(mCameraId);
mRawDumpChannel = new QCamera3RawDumpChannel(mCameraHandle->camera_handle,
mCameraHandle->ops,rawDumpSize,&gCamCapability[mCameraId]->padding_info,
this, CAM_QCOM_FEATURE_NONE);
...
//进行相关Channel的配置
...
/* Initialize mPendingRequestInfo and mPendnigBuffersMap */
for (List<PendingRequestInfo>::iterator i = mPendingRequestsList.begin();
i != mPendingRequestsList.end(); i++)
clearInputBuffer(i->input_buffer);
i = mPendingRequestsList.erase(i);
mPendingFrameDropList.clear();
// Initialize/Reset the pending buffers list
mPendingBuffersMap.num_buffers = 0;
mPendingBuffersMap.mPendingBufferList.clear();
mPendingReprocessResultList.clear();
return rc;
此方法内容比较多,只抽取其中核心的代码进行说明,它首先会根据HAL的版本来对stream进行相应的配置初始化,然后再根据stream类型对stream_list的stream创建相应的Channel,主要有QCamera3MetadataChannel,QCamera3SupportChannel等,然后再进行相应的配置,其中QCamera3MetadataChannel在后面的处理capture request的时候会用到,这里就不做分析,而Camerametadata则是Java层和CameraService之间传递的元数据,见android6.0源码分析之Camera API2.0简介中的Camera2架构图,至此,QCamera3HardwareInterface构造结束,与本文相关的就是配置了mCameraDevice.ops。
2.2 openCamera分析
本节主要分析Module是如何打开Camera的,openCamera的代码如下:
//QCamera3HWI.cpp
int QCamera3HardwareInterface::openCamera(struct hw_device_t **hw_device)
int rc = 0;
if (mCameraOpened) //如果Camera已经被打开,则此次打开的设备为NULL,并且打开结果为PERMISSION_DENIED
*hw_device = NULL;
return PERMISSION_DENIED;
//调用openCamera方法来打开
rc = openCamera();
//打开结果处理
if (rc == 0)
//获取打开成功的hw_device_t对象
*hw_device = &mCameraDevice.common;
else
*hw_device = NULL;
return rc;
它调用了openCamera()方法来打开Camera:
// QCamera3HWI.cpp
int QCamera3HardwareInterface::openCamera()
...
//打开camera,获取mCameraHandle
mCameraHandle = camera_open((uint8_t)mCameraId);
...
mCameraOpened = true;
//注册mm-camera-interface里的事件处理,其中camEctHandle为事件处理Handle
rc = mCameraHandle->ops->register_event_notify(mCameraHandle->camera_handle,camEvtHandle
,(void *)this);
return NO_ERROR;
它调用camera_open方法来打开Camera,并且向CameraHandle注册了Camera 时间处理的Handle–camEvtHandle,首先分析camera_open方法,这里就将进入高通的Camera的实现了,而Mm_camera_interface.c是高通提供的相关操作的接口,接下来分析高通Camera的camera_open方法:
//Mm_camera_interface.c
mm_camera_vtbl_t * camera_open(uint8_t camera_idx)
int32_t rc = 0;
mm_camera_obj_t* cam_obj = NULL;
/* opened already 如果已经打开*/
if(NULL != g_cam_ctrl.cam_obj[camera_idx])
/* Add reference */
g_cam_ctrl.cam_obj[camera_idx]->ref_count++;
pthread_mutex_unlock(&g_intf_lock);
return &g_cam_ctrl.cam_obj[camera_idx]->vtbl;
cam_obj = (mm_camera_obj_t *)malloc(sizeof(mm_camera_obj_t));
...
/* initialize camera obj */
memset(cam_obj, 0, sizeof(mm_camera_obj_t));
cam_obj->ctrl_fd = -1;
cam_obj->ds_fd = -1;
cam_obj->ref_count++;
cam_obj->my_hdl = mm_camera_util_generate_handler(camera_idx);
cam_obj->vtbl.camera_handle = cam_obj->my_hdl; /* set handler */
//mm_camera_ops里绑定了相关的操作接口
cam_obj->vtbl.ops = &mm_camera_ops;
pthread_mutex_init(&cam_obj->cam_lock, NULL);
pthread_mutex_lock(&cam_obj->cam_lock);
pthread_mutex_unlock(&g_intf_lock);
//调用mm_camera_open方法来打开camera
rc = mm_camera_open(cam_obj);
pthread_mutex_lock(&g_intf_lock);
...
//结果处理,并返回
...
由代码可知,这里将会初始化一个mm_camera_obj_t对象,其中,ds_fd为socket fd,而mm_camera_ops则绑定了相关的接口,最后调用mm_camera_open来打开Camera,首先来看看mm_camera_ops绑定了哪些方法:
//Mm_camera_interface.c
static mm_camera_ops_t mm_camera_ops =
.query_capability = mm_camera_intf_query_capability,
//注册事件通知的方法
.register_event_notify = mm_camera_intf_register_event_notify,
.close_camera = mm_camera_intf_close,
.set_parms = mm_camera_intf_set_parms,
.get_parms = mm_camera_intf_get_parms,
.do_auto_focus = mm_camera_intf_do_auto_focus,
.cancel_auto_focus = mm_camera_intf_cancel_auto_focus,
.prepare_snapshot = mm_camera_intf_prepare_snapshot,
.start_zsl_snapshot = mm_camera_intf_start_zsl_snapshot,
.stop_zsl_snapshot = mm_camera_intf_stop_zsl_snapshot,
.map_buf = mm_camera_intf_map_buf,
.unmap_buf = mm_camera_intf_unmap_buf,
.add_channel = mm_camera_intf_add_channel,
.delete_channel = mm_camera_intf_del_channel,
.get_bundle_info = mm_camera_intf_get_bundle_info,
.add_stream = mm_camera_intf_add_stream,
.link_stream = mm_camera_intf_link_stream,
.delete_stream = mm_camera_intf_del_stream,
//配置stream的方法
.config_stream = mm_camera_intf_config_stream,
.qbuf = mm_camera_intf_qbuf,
.get_queued_buf_count = mm_camera_intf_get_queued_buf_count,
.map_stream_buf = mm_camera_intf_map_stream_buf,
.unmap_stream_buf = mm_camera_intf_unmap_stream_buf,
.set_stream_parms = mm_camera_intf_set_stream_parms,
.get_stream_parms = mm_camera_intf_get_stream_parms,
.start_channel = mm_camera_intf_start_channel,
.stop_channel = mm_camera_intf_stop_channel,
.request_super_buf = mm_camera_intf_request_super_buf,
.cancel_super_buf_request = mm_camera_intf_cancel_super_buf_request,
.flush_super_buf_queue = mm_camera_intf_flush_super_buf_queue,
.configure_notify_mode = mm_camera_intf_configure_notify_mode,
//处理capture的方法
.process_advanced_capture = mm_camera_intf_process_advanced_capture
;接着分析mm_camera_open方法:
//Mm_camera.c
int32_t mm_camera_open(mm_camera_obj_t *my_obj)
...
do
n_try--;
//根据设备名字,打开相应的设备驱动fd
my_obj->ctrl_fd = open(dev_name, O_RDWR | O_NONBLOCK);
if((my_obj->ctrl_fd >= 0) || (errno != EIO) || (n_try <= 0 ))
break;
usleep(sleep_msec * 1000U);
while (n_try > 0);
...
//打开domain socket
n_try = MM_CAMERA_DEV_OPEN_TRIES;
do
n_try--;
my_obj->ds_fd = mm_camera_socket_create(cam_idx, MM_CAMERA_SOCK_TYPE_UDP);
usleep(sleep_msec * 1000U);
while (n_try > 0);
...
//初始化锁
pthread_mutex_init(&my_obj->msg_lock, NULL);
pthread_mutex_init(&my_obj->cb_lock, NULL);
pthread_mutex_init(&my_obj->evt_lock, NULL);
pthread_cond_init(&my_obj->evt_cond, NULL);
//开启线程,它的线程体在mm_camera_dispatch_app_event方法中
mm_camera_cmd_thread_launch(&my_obj->evt_thread,
mm_camera_dispatch_app_event,
(void *)my_obj);
mm_camera_poll_thread_launch(&my_obj->evt_poll_thread,
MM_CAMERA_POLL_TYPE_EVT);
mm_camera_evt_sub(my_obj, TRUE);
return rc;
...
由代码可知,它会打开Camera的设备文件,然后开启dispatch_app_event线程,线程方法体mm_camera_dispatch_app_event方法代码如下:
//Mm_camera.c
static void mm_camera_dispatch_app_event(mm_camera_cmdcb_t *cmd_cb,void* user_data)
mm_camera_cmd_thread_name("mm_cam_event");
int i;
mm_camera_event_t *event = &cmd_cb->u.evt;
mm_camera_obj_t * my_obj = (mm_camera_obj_t *)user_data;
if (NULL != my_obj)
pthread_mutex_lock(&my_obj->cb_lock);
for(i = 0; i < MM_CAMERA_EVT_ENTRY_MAX; i++)
if(my_obj->evt.evt[i].evt_cb)
//调用camEvtHandle方法
my_obj->evt.evt[i].evt_cb(
my_obj->my_hdl,
event,
my_obj->evt.evt[i].user_data);
pthread_mutex_unlock(&my_obj->cb_lock);
最后会调用mm-camera-interface中注册好的事件处理evt_cb,它就是在前面注册好的camEvtHandle:
//QCamera3HWI.cpp
void QCamera3HardwareInterface::camEvtHandle(uint32_t /*camera_handle*/,mm_camera_event_t *evt,
void *user_data)
//获取QCamera3HardwareInterface接口指针
QCamera3HardwareInterface *obj = (QCamera3HardwareInterface *)user_data;
if (obj && evt)
switch(evt->server_event_type)
case CAM_EVENT_TYPE_DAEMON_DIED:
camera3_notify_msg_t notify_msg;
memset(¬ify_msg, 0, sizeof(camera3_notify_msg_t));
notify_msg.type = CAMERA3_MSG_ERROR;
notify_msg.message.error.error_code = CAMERA3_MSG_ERROR_DEVICE;
notify_msg.message.error.error_stream = NULL;
notify_msg.message.error.frame_number = 0;
obj->mCallbackOps->notify(obj->mCallbackOps, ¬ify_msg);
break;
case CAM_EVENT_TYPE_DAEMON_PULL_REQ:
pthread_mutex_lock(&obj->mMutex);
obj->mWokenUpByDaemon = true;
//开启process_capture_request
obj->unblockRequestIfNecessary();
pthread_mutex_unlock(&obj->mMutex);
break;
default:
break;
else
由代码可知,它会调用QCamera3HardwareInterface的unblockRequestIfNecessary来发起结果处理请求:
//QCamera3HWI.cpp
void QCamera3HardwareInterface::unblockRequestIfNecessary()
// Unblock process_capture_request
//开启process_capture_request
pthread_cond_signal(&mRequestCond);
在初始化QCamera3HardwareInterface对象的时候,就绑定了处理Metadata的回调captureResultCb方法:它主要是对数据源进行相应的处理,而具体的capture请求的结果处理还是由process_capture_request来进行处理的,而这里会调用方法unblockRequestIfNecessary来触发process_capture_request方法执行,而在Camera框架中,发起请求时会启动一个RequestThread线程,在它的threadLoop方法中,会不停的调用process_capture_request方法来进行请求的处理,而它最后会回调Camera3Device中的processCaptureResult方法来进行结果处理:
//Camera3Device.cpp
void Camera3Device::processCaptureResult(const camera3_capture_result *result)
...
...
if (mUsePartialResult && result->result != NULL)
if (mDeviceVersion >= CAMERA_DEVICE_API_VERSION_3_2)
...
if (isPartialResult)
request.partialResult.collectedResult.append(result->result);
else
camera_metadata_ro_entry_t partialResultEntry;
res = find_camera_metadata_ro_entry(result->result,
ANDROID_QUIRKS_PARTIAL_RESULT, &partialResultEntry);
if (res != NAME_NOT_FOUND &&partialResultEntry.count > 0 &&
partialResultEntry.data.u8[0] ==ANDROID_QUIRKS_PARTIAL_RESULT_PARTIAL)
isPartialResult = true;
request.partialResult.collectedResult.append(
result->result);
request.partialResult.collectedResult.erase(
ANDROID_QUIRKS_PARTIAL_RESULT);
if (isPartialResult)
// Fire off a 3A-only result if possible
if (!request.partialResult.haveSent3A)
//处理3A结果
request.partialResult.haveSent3A =processPartial3AResult(frameNumber,
request.partialResult.collectedResult,request.resultExtras);
...
//查找camera元数据入口
camera_metadata_ro_entry_t entry;
res = find_camera_metadata_ro_entry(result->result,
ANDROID_SENSOR_TIMESTAMP, &entry);
if (shutterTimestamp == 0)
request.pendingOutputBuffers.appendArray(result->output_buffers,
result->num_output_buffers);
else
重要的分析//返回处理的outputbuffer
returnOutputBuffers(result->output_buffers,
result->num_output_buffers, shutterTimestamp);
if (result->result != NULL && !isPartialResult)
if (shutterTimestamp == 0)
request.pendingMetadata = result->result;
request.partialResult.collectedResult = collectedPartialResult;
else
CameraMetadata metadata;
metadata = result->result;
//发送Capture结构,即调用通知回调
sendCaptureResult(metadata, request.resultExtras,
collectedPartialResult, frameNumber, hasInputBufferInRequest,
request.aeTriggerCancelOverride);
removeInFlightRequestIfReadyLocked(idx);
// scope for mInFlightLock
if (result->input_buffer != NULL)
if (hasInputBufferInRequest)
Camera3Stream *stream =
Camera3Stream::cast(result->input_buffer->stream);
重要的分析//返回处理的inputbuffer
res = stream->returnInputBuffer(*(result->input_buffer));
else
分析returnOutputBuffers方法,inputbuffer的runturnInputBuffer方法流程类似:
//Camera3Device.cpp
void Camera3Device::returnOutputBuffers(const camera3_stream_buffer_t *outputBuffers, size_t
numBuffers, nsecs_t timestamp)
for (size_t i = 0; i < numBuffers; i++)
Camera3Stream *stream = Camera3Stream::cast(outputBuffers[i].stream);
status_t res = stream->returnBuffer(outputBuffers[i], timestamp);
...
方法里调用了returnBuffer方法:
//Camera3Stream.cpp
status_t Camera3Stream::returnBuffer(const camera3_stream_buffer &buffer,nsecs_t timestamp)
//返回buffer
status_t res = returnBufferLocked(buffer, timestamp);
if (res == OK)
fireBufferListenersLocked(buffer, /*acquired*/false, /*output*/true);
mOutputBufferReturnedSignal.signal();
return res;
再继续看returnBufferLocked,它调用了returnAnyBufferLocked方法,而returnAnyBufferLocked方法又调用了returnBufferCheckedLocked方法,现在分析returnBufferCheckedLocked:
// Camera3OutputStream.cpp
status_t Camera3OutputStream::returnBufferCheckedLocked(const camera3_stream_buffer &buffer,
nsecs_t timestamp,bool output,/*out*/sp<Fence> *releaseFenceOut)
...
// Fence management - always honor release fence from HAL
sp<Fence> releaseFence = new Fence(buffer.release_fence);
int anwReleaseFence = releaseFence->dup();
if (buffer.status == CAMERA3_BUFFER_STATUS_ERROR)
// Cancel buffer
res = currentConsumer->cancelBuffer(currentConsumer.get(),
container_of(buffer.buffer, ANativeWindowBuffer, handle),
anwReleaseFence);
...
else
...
res = currentConsumer->queueBuffer(currentConsumer.get(),
container_of(buffer.buffer, ANativeWindowBuffer, handle),
anwReleaseFence);
...
...
return res;
由代码可知,如果Buffer没有出现状态错误,它会调用currentConsumer的queueBuffer方法,而具体的Consumer则是在应用层初始化Camera时进行绑定的,典型的Consumer有SurfaceTexture,ImageReader等,而在Native层中,它会调用BufferQueueProducer的queueBuffer方法:
// BufferQueueProducer.cpp
status_t BufferQueueProducer::queueBuffer(int slot,
const QueueBufferInput &input, QueueBufferOutput *output)
...
//初始化Frame可用的监听器
sp<IConsumerListener> frameAvailableListener;
sp<IConsumerListener> frameReplacedListener;
int callbackTicket = 0;
BufferItem item;
// Autolock scope
...
const sp<GraphicBuffer>& graphicBuffer(mSlots[slot].mGraphicBuffer);
Rect bufferRect(graphicBuffer->getWidth(), graphicBuffer->getHeight());
Rect croppedRect;
crop.intersect(bufferRect, &croppedRect);
...
//如果队列为空
if (mCore->mQueue.empty())
mCore->mQueue.push_back(item);
frameAvailableListener = mCore->mConsumerListener;
else
//否则,不为空,对Buffer进行处理,并获取FrameAvailableListener监听
BufferQueueCore::Fifo::iterator front(mCore->mQueue.begin());
if (front->mIsDroppable)
if (mCore->stillTracking(front))
mSlots[front->mSlot].mBufferState = BufferSlot::FREE;
mCore->mFreeBuffers.push_front(front->mSlot);
*front = item;
frameReplacedListener = mCore->mConsumerListener;
else
mCore->mQueue.push_back(item);
frameAvailableListener = mCore->mConsumerListener;
mCore->mBufferHasBeenQueued = true;
mCore->mDequeueCondition.broadcast();
output->inflate(mCore->mDefaultWidth, mCore->mDefaultHeight,mCore->mTransformHint,
static_cast<uint32_t>(mCore->mQueue.size()));
// Take a ticket for the callback functions
callbackTicket = mNextCallbackTicket++;
mCore->validateConsistencyLocked();
// Autolock scope
...
...
if (frameAvailableListener != NULL)
//回调SurfaceTexture中定义好的监听IConsumerListener的onFrameAvailable方法来对数据进行处理
frameAvailableListener->onFrameAvailable(item);
else if (frameReplacedListener != NULL)
frameReplacedListener->onFrameReplaced(item);
++mCurrentCallbackTicket;
mCallbackCondition.broadcast();
return NO_ERROR;
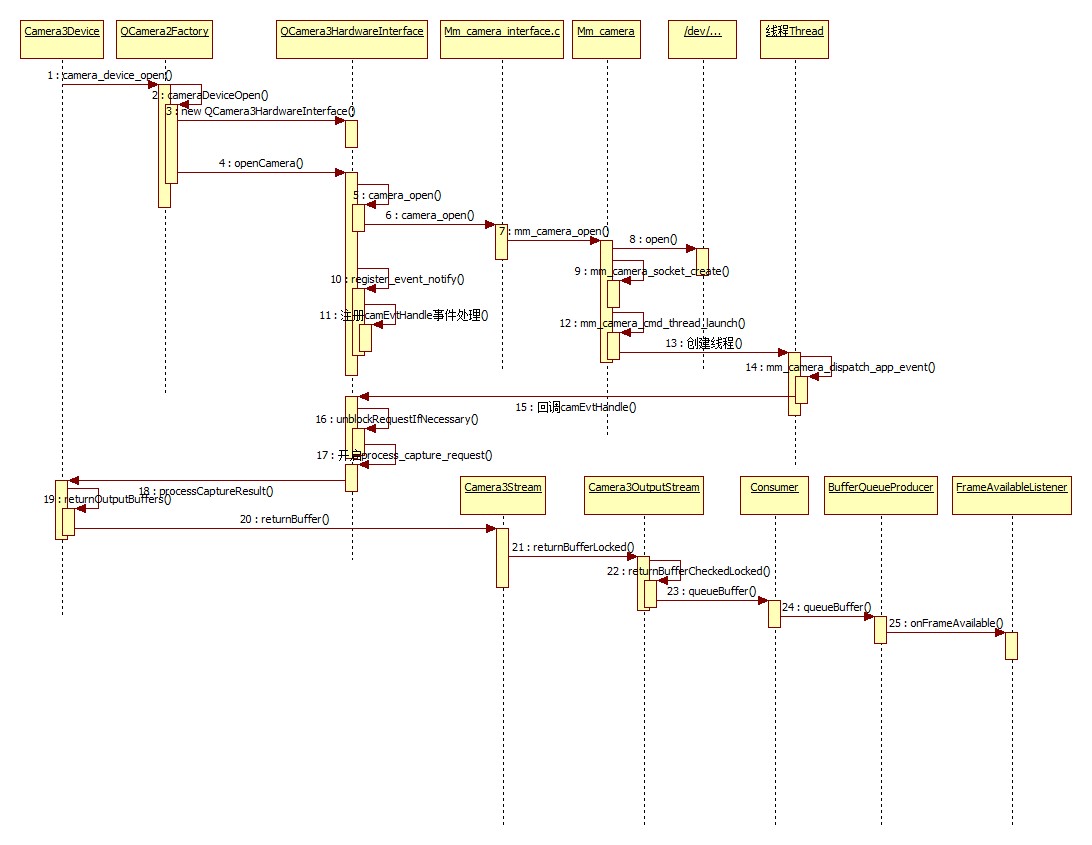
由代码可知,它最后会调用Consumer的回调FrameAvailableListener的onFrameAvailable方法,到这里,就比较清晰为什么我们在写Camera应用,为其初始化Surface时,我们需要重写FrameAvailableListener了,因为在此方法里面,会进行结果的处理,至此,Camera HAL的Open流程就分析结束了。下面给出流程的时序图:
以上是关于nfc hal分析的主要内容,如果未能解决你的问题,请参考以下文章