FreeRTOS学习
Posted Caramel_biscuit
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了FreeRTOS学习相关的知识,希望对你有一定的参考价值。
裸机与RTOS对比
裸机:又称为前后台系统,前台系统指的是中断服务函数,后台系统指的大循环,即应用程序。
- 实时性差:(应用程序轮流执行)
- delay:空等待,CPU不执行其它代码
- 结构臃肿:实现功能都放在无限循环
RTOS:Real Time OS,实时操作系统,强调“实时性”
- 分而治之:实现功能划分为多个任务
- 延时函数:任务调度
- 抢占式:高优先级任务抢占低优先级任务
- 任务堆栈:每个任务都有自己的栈空间,用于保存局部变量以及任务的上下文信息。
中断可以打断任意任务
FreeRTOS基础知识
调度器:使用相关的调度算法来决定当前需要执行哪个任务。
FreeRTOS一共支持三种任务调度方式:
- 抢占式调度:主要针对优先级不同的任务,每个任务都有一个优先级,优先级高的任务可以抢占优先级低的任务。(数值越大,优先级越大)
- 时间片调度:主要针对优先级相同的任务,当多个任务的优先级相同时,任务调度器会在每一次系统时钟节拍到的时候切换任务。
- 协程式调度:当前执行任务将会一直执行,同时高优先级的任务不会抢占低优先级任务。FreeRTOS现在虽然还支持,但是官方表示已经不再更新协程式调度。
抢占式调度
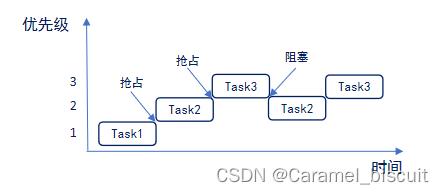
运行过程如下:
1、首先Task1在运行中,在这个过程中Task2就绪了,在抢占式调度器的作用下Task2会抢占Task1的运行
2、Task2运行过程中,Task3就绪了,在抢占式调度器的作用下Task3会抢占Task2的运行
3、Task3运行过程中,Task3阻塞了(系统延时或等待信号量等),此时就绪态中,优先级最高的任务Task2执行
4、Task3阻塞解除了(延时到了或者接收到信号量),此时Task3恢复到就绪态中,抢占TasK2的运行
高优先级任务,优先执行;高优先级任务不停止,低优先级任务无法执行;被抢占的任务将会进入就绪态。
时间片调度
同等优先级任务轮流地享有相同的CPU时间(可设置:设置滴答定时器的中断周期),叫时间片,在FreeRTOS中,一个时间片就等于SysTick中断周期。
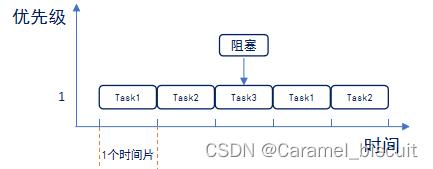
Task3运行过程中(还不到一个时间片),Task3阻塞了(系统延时或等待信号量等),此时直接切换到下一个任务Task1。
同等优先级任务,轮流执行;时间片轮转。
一个时间片大小,取决于滴答定时器中断周期。
没有用完的时间片不会再使用,下次任务Task3得到执行还是按照一个时间片的时钟节拍运行。
任务状态
FreeRTOS中任务共存在4种状态:
- 运行态:正在执行的任务,该任务处于运行态,注意在STM32中,同一个时间仅一个任务处于运行态。
- 就绪态:如果该任务已经能够被执行,但当前还未被执行,那么该任务处于就绪态。
- 阻塞态:任务因延时或等待外部事件发生,那么这个任务就处于阻塞态。
- 挂起态:类似暂停,调度函数vTaskSuspend()进入挂起态,需要调用解挂函数vTaskResume()才可以进入就绪态。
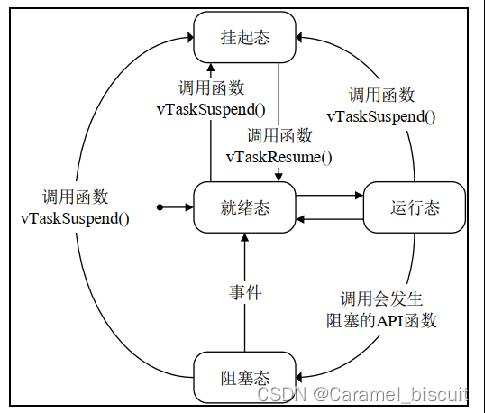
- 仅就绪态可以转变成运行态。
系统配置文件详解
FreeRTOSConfig.h配置文件作用:对FreeRTOS进行功能配置和裁剪,以及API函数使能。
相关宏可分为三类:
- INCLUDE:配置FreeRTOS可选的API函数
- config:完成FreeRTOS的功能配置和裁剪
- 其它配置项:PendSV宏定义、SVC宏定义(宏定义给Port.c调用)
#define configUSE_PREEMPTION 1 //1使用抢占式内核,0使用协程
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 1 //1启用特殊方法来选择下一个要运行的任务,1:使用硬件计算下一个要运行的任务(使用特殊方法,STM32支持,任务优先级的最大值有限制32(0~31))。0:使用软件算法计算下一个要运行的任务(通用方式,不限制优先级的最大值,效率较低)
#define configUSE_TICKLESS_IDLE 0 //1启用低功耗tickless模式
#define configCPU_CLOCK_HZ (SystemCoreClock) //CPU频率
#define configIDLE_SHOULD_YIELD 1 //为1时空闲任务放弃CPU使用权给其他同优先级的用户任务
#define configUSE_TASK_NOTIFICATIONS 1 //为1时开启任务通知功能,默认开启
/***************************************************************************************************************/
/* FreeRTOS与内存申请有关配置选项 */
/***************************************************************************************************************/
#define configSUPPORT_DYNAMIC_ALLOCATION 1 //支持动态内存申请
#define configTOTAL_HEAP_SIZE ((size_t)(20*1024)) //系统所有总的堆大小
/* FreeRTOS与钩子函数有关的配置选项 */
/***************************************************************************************************************/
#define configUSE_IDLE_HOOK 0 //1,使用空闲钩子;0,不使用
#define configUSE_TICK_HOOK 0 //1,使用时间片钩子;0,不使用
FreeRTOS学习笔记1—FreeRTOS移植
1. 新建完整的可以点亮LED灯的工程
2.添加FreeRTOS源码
- 2.1 .将FreeRTOS的源码拷贝到新建工程的FreeRTOS的文件加下
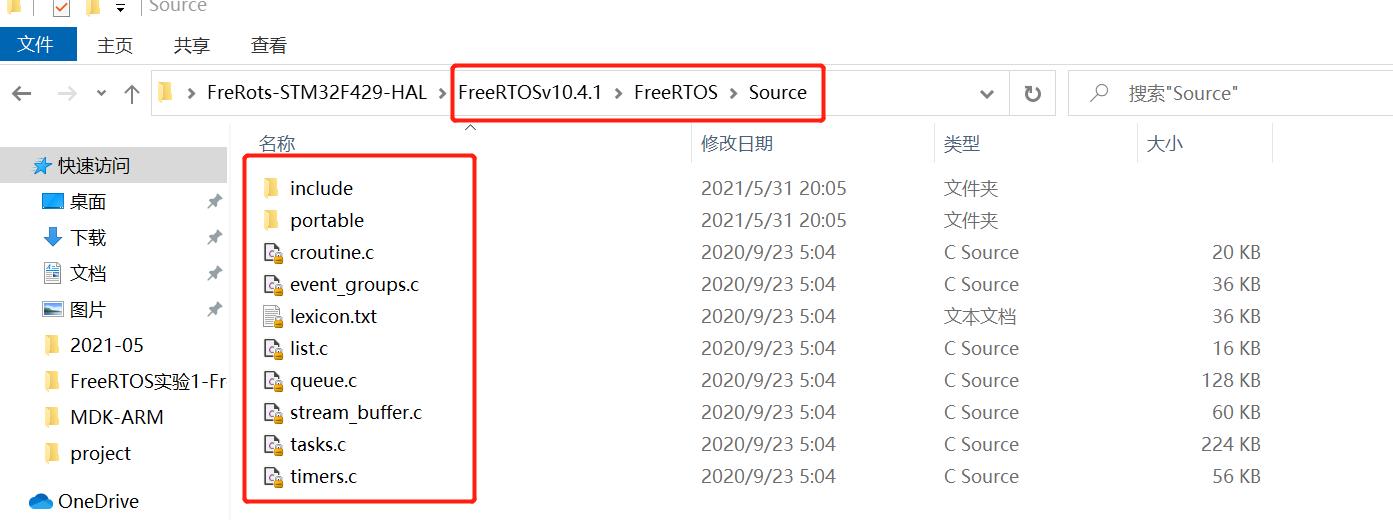

- 2.2.Protable文件下只保留Keil、MemMang、RVDS三个文件夹,其余的全部删除

- 2.3.在keil工程新建FreeRTOS_CORE、FreeRTOS_PORTABLE两个分组,分别添加如下图所示的文件
- 2.4.添加头文件路径,如下图所示
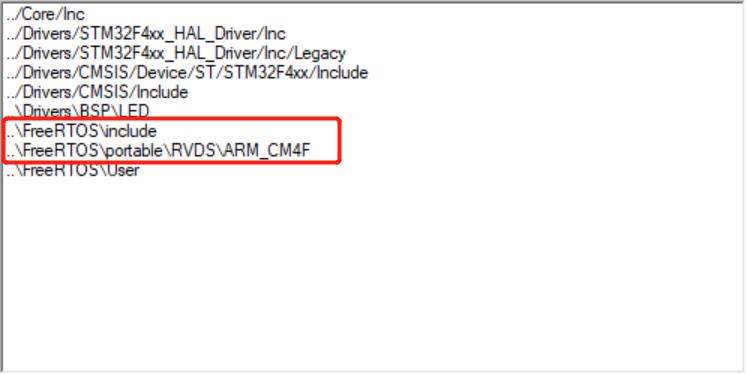
- 添加头文件FreeRTOSConfig.h,在…\\FreeRTOSv10.4.1\\FreeRTOS\\Demo\\CORTEX_M4F_STM32F407ZG-SK路径下把FreeRTOSConfig.h拷贝到工程中,位置自定义,本文将其移植到… \\FreeRTOS\\User路径下。
到此为止,我们已经将FreeRTOS的源码添加完毕,接下来我们开始编译修改
3.修改文件编译
- 3.1.将FreeRTOSConfig.h中
#ifdef __ICCARM__
#include <stdint.h>
extern uint32_t SystemCoreClock;
#endif修改为:
#if defined(__ICCARM__)||defined(__CC_ARM) ||defined(__GNUC__)
#include <stdint.h>
extern uint32_t SystemCoreClock;
#endif
- 3.2.将stm32f4xx_it.c中的void SVC_Handler(void)、void PendSV_Handler(void)、void SysTick_Handler(void)三个函数屏蔽,因为在port.c中也定义了这三个函数;
- 3.3.将FreeRTOSConfig.h中的configUSE_IDLE_HOOK、configUSE_TICK_HOOK、configCHECK_FOR_STACK_OVERFLOW、configUSE_MALLOC_FAILED_HOOK四个钩子函数启用的宏定义为0,至此编译应该为0 Error(s), 0 Warning(s),如有错误在仔细检查
4.新建实验任务,验证移植情况
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
//任务优先级
#define LED0_TASK_PRIO 2
//任务堆栈大小
#define LED0_STK_SIZE 50
//任务句柄
TaskHandle_t LED0Task_Handler;
//任务函数
void led0_task(void *pvParameters);
//任务优先级
#define LED1_TASK_PRIO 3
//任务堆栈大小
#define LED1_STK_SIZE 50
//任务句柄
TaskHandle_t LED1Task_Handler;
//任务函数
void led1_task(void *pvParameters);
//开始任务任务函数
void start_task(void *pvParameters)
taskENTER_CRITICAL(); //进入临界区
//创建LED0任务
xTaskCreate((TaskFunction_t )led0_task,
(const char* )"led0_task",
(uint16_t )LED0_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED0_TASK_PRIO,
(TaskHandle_t* )&LED0Task_Handler);
//创建LED1任务
xTaskCreate((TaskFunction_t )led1_task,
(const char* )"led1_task",
(uint16_t )LED1_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED1_TASK_PRIO,
(TaskHandle_t* )&LED1Task_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
//LED0任务函数
void led0_task(void *pvParameters)
while(1)
Led_State_Set(LED_Gren,LED_ON);
vTaskDelay(500);
Led_State_Set(LED_Gren,LED_OFF);
vTaskDelay(500);
//LED1任务函数
void led1_task(void *pvParameters)
while(1)
vTaskDelay(200);
Led_State_Set(LED_Blue,LED_ON);
vTaskDelay(800);
Led_State_Set(LED_Blue,LED_OFF);
/**
* @brief The application entry point.
* @param None
* @retval int
*/
int main(void)
/* Reset of all peripherals, Initializes the Flash interface and the Systick*/
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
Led_Port_Init();
//创建开始任务
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
以上是关于FreeRTOS学习的主要内容,如果未能解决你的问题,请参考以下文章