Ubuntu18.04配置carla0.9.11踩坑与解决方法总结,同时解决安装carla-ros-bridge遇到的问题,并复现OpenCDA成功与ros关联
Posted kxk_ustc
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Ubuntu18.04配置carla0.9.11踩坑与解决方法总结,同时解决安装carla-ros-bridge遇到的问题,并复现OpenCDA成功与ros关联相关的知识,希望对你有一定的参考价值。
Ubuntu18.04配置carla0.9.11踩坑与解决方法总结,同时解决安装carla-ros-bridge遇到的问题,并复现OpenCDA成功与ros关联
背景:
主要是为了复现叶小飞的OpenCDA仿真环境,方便验证自己的多车协同算法。又重新捡起了carla仿真。一开始使用了Ubuntu16.04配置了所有环境,但是使用OpenCDA的代码时,提示系统内核不符合要求,无奈还是升级了18.04才解决问题。这一路踩坑不少,总结一下,方便以后查阅,同时希望能够帮助到此刻焦头烂额的同行们。
UE4和carla版本的选择与安装
注意:
OpenCDA的选择要求是carla>=0.9.11。并且提供了按照源的方案安装的步骤。
安装之前一定注意,通过源的安装方法,保证磁盘空间要预留至少100G的空间,且运行carla服务器也需要至少4GB的GPU。可以通过指令nvidia-smi查看系统GPU情况。
这里选择Unreal Engine4.24和carla0.9.11,基于Ubuntu18.04;
- 依赖:
sudo apt-get update &&
sudo apt-get install wget software-properties-common &&
sudo add-apt-repository ppa:ubuntu-toolchain-r/test &&
wget -O - https://apt.llvm.org/llvm-snapshot.gpg.key|sudo apt-key add - &&
sudo apt-add-repository "deb http://apt.llvm.org/xenial/ llvm-toolchain-xenial-8 main" &&
sudo apt-get update
Ubuntu18.04下要安装有:
sudo apt-get install build-essential clang-8 lld-8 g++-7 cmake ninja-build libvulkan1 python python-pip python-dev python3-dev python3-pip libpng-dev libtiff5-dev libjpeg-dev tzdata sed curl unzip autoconf libtool rsync libxml2-dev &&
pip2 install --user setuptools &&
pip3 install --user -Iv setuptools==47.3.1 &&
pip2 install --user distro &&
pip3 install --user distro
同时为了避免UE和 CARLA 依赖项之间的兼容性问题,使用相同的编译器版本和 C++ runtime library来编译所有内容。CARLA 团队使用 clang-8 和 LLVM 的 libc++。使用以下指令更改默认 clang 版本以编译 Unreal Engine 和 CARLA 依赖项。
sudo update-alternatives --install /usr/bin/clang++ clang++ /usr/lib/llvm-8/bin/clang++ 180 &&
sudo update-alternatives --install /usr/bin/clang clang /usr/lib/llvm-8/bin/clang 180
-
申请一个github账号和Unreal Engine账号,并形成关联
详细步骤看这里 -
Unreal Engine 4.24的下载安装
安装的目录最好是在~/UnrealEngine_4.24,也就是/home/your path/UnrealEngine_4.24,当然也可以换地方,但是下面的路径问题都要按照相应的改变而调整:-
终端运行以下指令下载UE4,会在目录
/home/your path路径下生产UnrealEngine_4.24的文件夹。(如果速度慢,也可以自行去链接下载,并解压到/home/your path路径下)git clone --depth=1 -b 4.24 https://github.com/EpicGames/UnrealEngine.git ~/UnrealEngine_4.24 -
终端进入UE4文件路径下
cd ~/UnrealEngine_4.24 -
然后运行以下指令获取patch.txt文件并加载
wget https://carla-releases.s3.eu-west-3.amazonaws.com/Linux/UE_Patch/430667-13636743-patch.txt 430667-13636743-patch.txt patch --strip=4 < 430667-13636743-patch.txt -
编译,可能会比较慢。如果因为网速问题失败,建议多次尝试/更换网络/连接手机热点(为了排查错误可以三个指令分别运行)
./Setup.sh && ./GenerateProjectFiles.sh && make -
最后运行以下UE4确保已经正确安装,第一次速度可能比较慢
cd ~/UnrealEngine_4.24/Engine/Binaries/Linux && ./UE4Editor
-
-
Carla0.9.11的下载安装
不推荐使用git clone https://github.com/carla-simulator/carla指令直接在/home/your path目录下获取carla文件,这里默认下载的是最新版本carla,当时默认下载了0.9.13,和UE4.24不匹配,害我所有功夫都白费了。
手动进入carla0.9.11下载压缩包,并解压到/home/your path目录下,修改文件夹名为carla-
进入carla文件夹路径:
cd ~/carla -
运行
./Update.sh(为了下载content文件,速度可能会很慢,可以连接热点) -
添加UE4的工作路径
sudo gedit ~/.bashrc
将export UE4_ROOT=~/UnrealEngine_4.24加入到.bashrc文件里
保存并退出,执行source ~/.bashrc -
安装carla的最后一步,就是运行make指令,第一次使用,要先运行make PythonAPI,加载相应的模块。
如果你是用python3,那么可以直接执行make PythonAPI,默认是执行make PythonAPI.3的
如果需要用Python2,系统默认的是python2.7,执行make PythonAPI ARGS="--python-version=2"
一般只需要make PythonAPI就行了。
这里遇到的几个问题:
①.网速慢,生成的Build文件夹下文件,链接总是失败,一次又一次尝试。切换到热点就解决了
②. make PythonAPI执行一半,提示了找不到git库,无法下载(截图没存),但是网上找都会说使用git init就可以解决。一定不要用该方法!!!!,只会越陷越深。这里提供我的.git文件,复制到carla/目录下就行了。(如果我还没有附加百度云链接,说明还在上传,请等待更新,有点大)
③. make PythonAPI过程中的error,提示fatal error: 'pyconfig.h' file not found,在该命令行执行:export CPLUS_INCLUDE_PATH=/home/your anaconda path/include/python3.7m如果没有创建anaconda,就用系统自带的python,版本根据自己的去改
export CPLUS_INCLUDE_PATH=/usr/include/python3.6m④.再次执行make PythonAPI就可以了,成功之后,Build文件夹应该已经完毕,同时生成PythonAPI/carla/dist/文件夹,下面有egg文件,我的是生成了
carla-0.9.11-py3.6-linux-x86_64.egg,如果需要py3.7的,可以直接复制并粘贴修改文件名为carla-0.9.11-py3.7-linux-x86_64.egg,因为后续OpenCDA要用,而且没有出现问题。如果使用了make PythonAPI ARGS="--python-version=2",会生成carla-0.9.11-py2.7-linux-x86_64.egg文件。
-
执行
make launch,第一次执行会比较慢,如果成功会弹出carla0.9.11的界面,首次打开会有教程。点击Play/播放,才相当于真正启动carla服务器。
如果出现BuildCarlaUE4.sh: ERROR: UE4_ROOT is not defined, or points to a non-existant directory, please set this environment variable.的问题,首先检查UE4文件及是否存在,以及是否将UE4的环境变量加到bashrc文件里,如果还是不行,在Carla/Util/BuildTools/BuildCarlaUE4.sh的首行加入UE4_ROOT=~/UnrealEngine_4.24
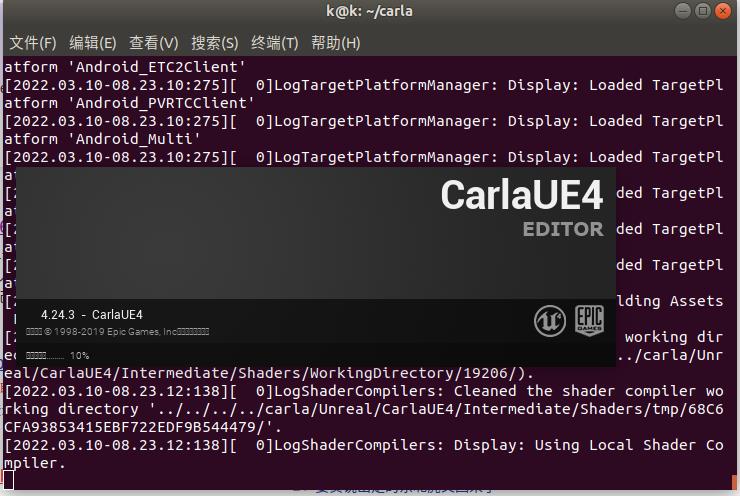
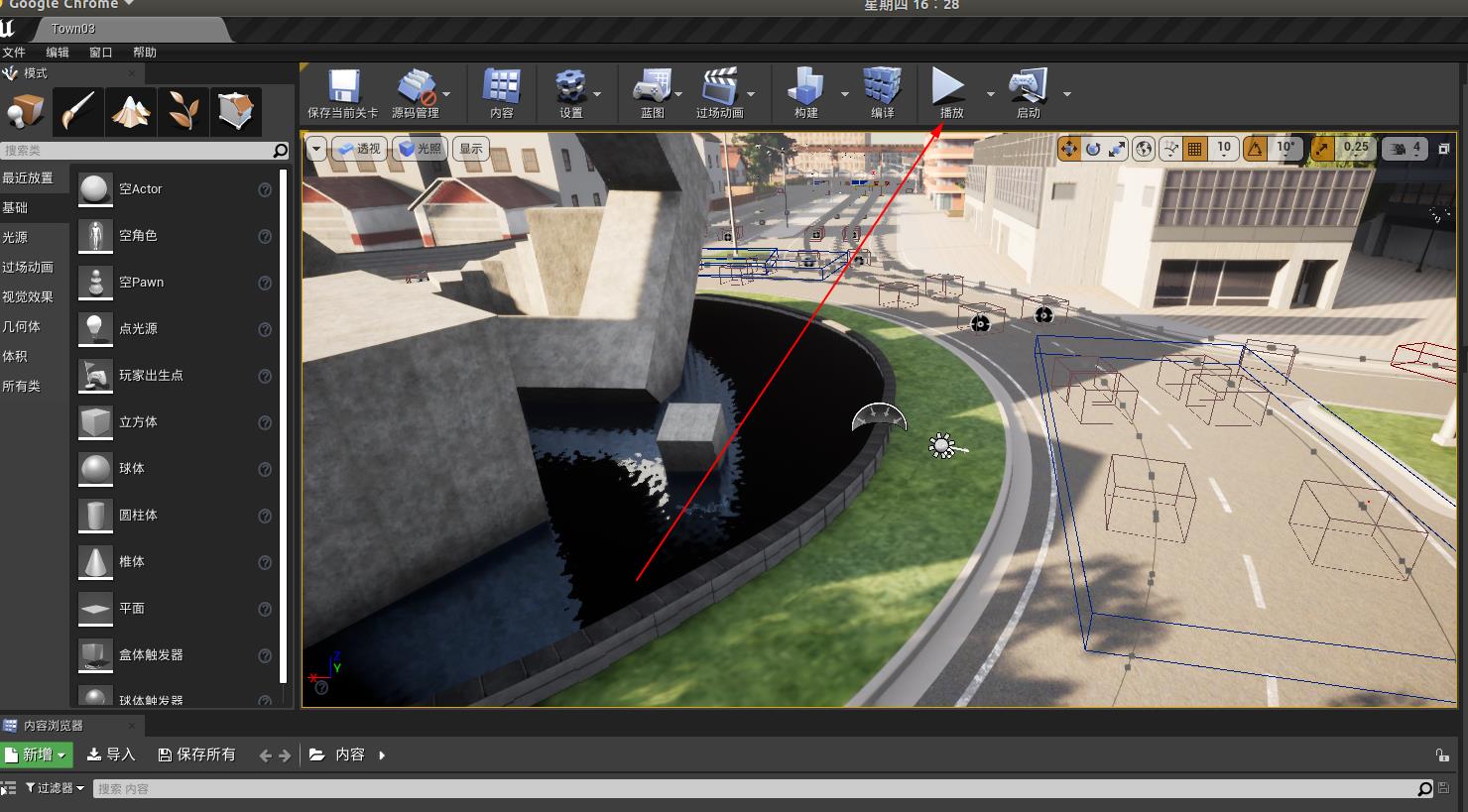

图1.carla启动及其运行界面 -
在终端测试,如果成功,会在carla服务器中加载人/车/动态天气
# Terminal A cd PythonAPI/examples python3 spawn_npc.py # Terminal B cd PythonAPI/examples python3 dynamic_weather.py至此,carla问题告一段落。期间碰到的问题主要还是网络不佳,以及版本不匹配问题。
-
OpenCDA的安装与使用
-
首先还是先下载OpenCDA:
git clone https://github.com/ucla-mobility/OpenCDA.git cd OpenCDA -
安装一些依赖,推荐使用Anaconda3,可以创建虚拟环境,各种依赖也都配置到虚拟环境里。这样也省的又把系统自带的Python给玩坏了。在上一步进入OpenCDA的工作目录下,执行以下命令:
conda env create -f environment.yml conda activate opencda python setup.py develop至此会成功创建名为opencda的虚拟环境。如果环境创建完成,但是通过environment.yml创建的依赖有失败的情况,执行:
pip install -r requirements.txt -
依赖完成后,需要将carla的库加入到opencda环境中。还是将以下指令加入到.bashrc文件中,并source:
export CARLA_HOME=/path/to/your/CARLA_ROOT export CARLA_VERSION=0.9.11 ./setup.sh如果一切顺利的话,setup.sh之后会显示Successful Setup! 为了检查是否真的成功,可以运行
python -c "import carla",如果没有出错,则ok。
注意:
setup.sh主要还是为了在opencda虚拟环境中导入carla库,使该虚拟环境下的python可以直接运行import carla。如果该指令最后失败了,打开.sh文件,按照代码,哪一步出错可以自己操作。同时,如果不利用虚拟环境下的python,为了方便直接运行import carla,按照叶小飞提供的教程,自己写一个setup.py来创建。
carla-ros-bridge的安装
为了方便OpenCDA与ros关联(其实就是carla和ros关联),这一步也是必不可少的。最主要的还是踩到坑了,又是因为默认的git下载是最新版本不匹配的问题。
如果要使用carla-ros-bridge,那么make PythonAPI ARGS="--python-version=2"是必不可少的了。和之前一样的步骤。
还是使用源来安装carla-ros-bridge,进入网页,手动下载ros-bridge-0.9.11.zip。同时单独下载其中的carla-msg,并生成.zip。后续会用。
我知道下面命令行中如果使用rosdep update你一定会失败,解决方法参看这里,也就是先执行:sudo pip install rosdepc安装rosdepc,然后将所有的rosdep改为rosdepc
mkdir -p ~/carla-ros-bridge/catkin_ws/src
#将下载好的ros-bridge放在src下并:
cd /carla-ros-bridge/catkin_ws/src
ln -s ../../ros-bridge
source /opt/ros/melodic/setup.bash # 注意,这里是 ROS melodic
cd ..
sudo rosdepc init
rosdepc update
rosdepc install --from-paths src --ignore-src -r
catkin_make
我遇到的错误:
-
在catkin_make的时候,提示:
CMake Error at /home/k/carla-ros-bridge/catkin_ws/build/ros-bridge/carla_ackermann_msgs/cmake/carla_ackermann_msgs-genmsg.cmake:3 (message): Could not find messages which '/home/k/carla-ros-bridge/catkin_ws/src/ros-bridge/carla_ackermann_msgs/msg/EgoVehicleControlInfo.msg' depends on. Did you forget to specify generate_messages(DEPENDENCIES ...)? Cannot locate message [CarlaEgoVehicleControl] in package [carla_msgs] with paths [['/home/k/carla-ros-bridge/catkin_ws/src/ros-bridge/carla_msgs/msg']] Call Stack (most recent call first): /opt/ros/melodic/share/genmsg/cmake/genmsg-extras.cmake:307 (include) ros-bridge/carla_ackermann_msgs/CMakeLists.txt:21 (generate_messages) -- Configuring incomplete, errors occurred! See also "/home/k/carla-ros-bridge/catkin_ws/build/CMakeFiles/CMakeOutput.log". See also "/home/k/carla-ros-bridge/catkin_ws/build/CMakeFiles/CMakeError.log". Invoking "cmake" failed原因是刚刚下载的ros-bridge包中的carla-msg,不知道为什么是空的,所以刚刚单独下载了carla-msg.zip,解压后把文件都复制进去,就好了。
-
在rosdepc update如果提示:也不用管它,不影响。
ERROR: Not all sources were able to be updated. [[[ ERROR: unable to process source [https://gitee.com/ohhuo/rosdistro/raw/master/releases/fuerte.yaml]: Failed to download target platform data for gbpdistro: <urlopen error ('_ssl.c:711: The handshake operation timed out',)> ]]]
以上这些工作都完成之后,就可以运行carla-ros-bridge了:
-
简单粗暴运行
make launch启动carla -
执行:
source ~/carla-ros-bridge/catkin_ws/devel/setup.bash(当然该指令也可以加到.bashrc文件中,但是官网提示可能会与在另一个工作空间中工作时产生冲突,我就没加。大不了每次执行前都运行一次该source) -
执行
export PYTHONPATH=$PYTHONPATH:~/carla/PythonAPI/carla/dist/carla-0.9.11-py3.7-linux-x86_64.egg -
启动carla-ros-bridge:
roslaunch carla_ros_bridge carla_ros_bridge.launch,在此之前,保证在其它终端运行了roscore,且carla已经运行,并点击了play播放按键。在其它终端中执行rostopic list,可以看到包含carla的节点:
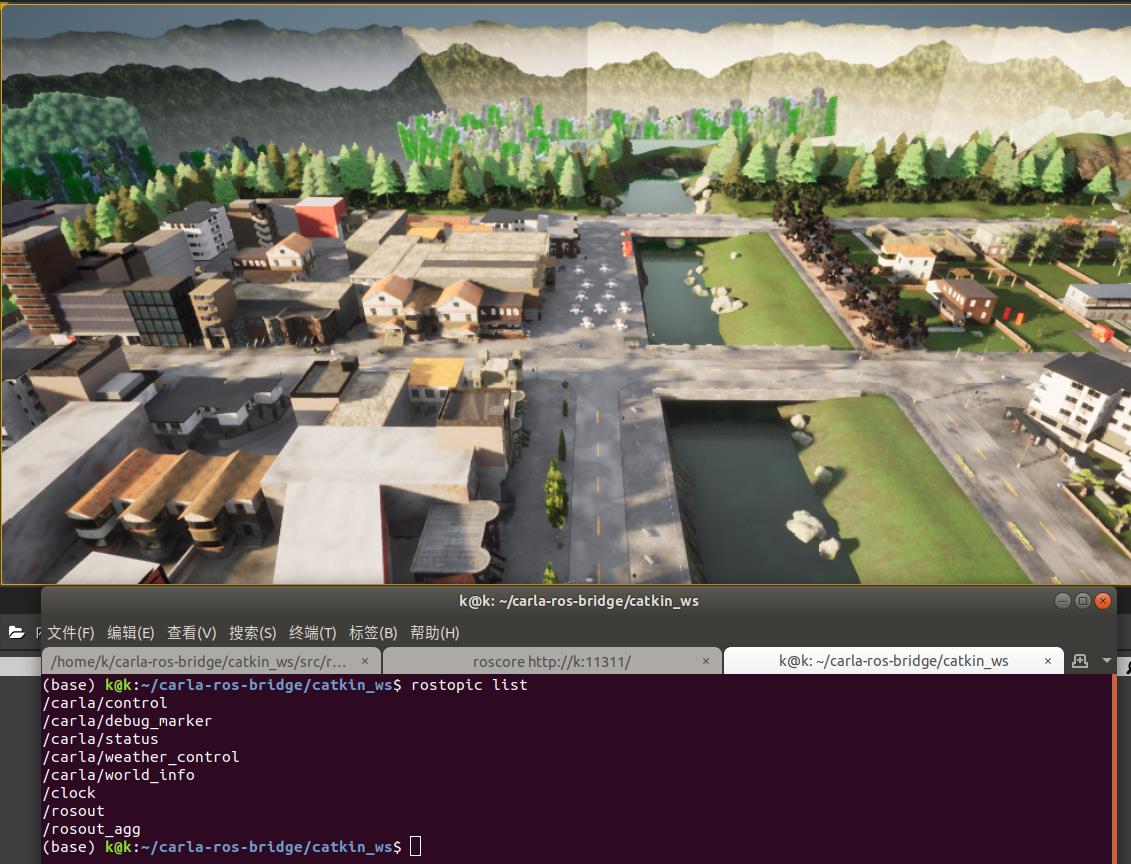
图3.carla-ros-bridge启动后tostopic list的结果 启动carla-ros-bridge的launch文件时,遇到的问题:
-
ModuleNotFoundError: No module named ‘transforms3d’
ModuleNotFoundError: No module named ‘rospkg’
解决方法是,在激活了opencda虚拟环境的终端中,执行:pip install rospkg pip install transforms3d -
ImportError: dynamic module does not define module export function (PyInit__tf2)
主要是因为,tf、tf2_ros等包是依赖于python2的,但是我运行该launch文件,就是依赖于python3的,我也搞不明白为什么了,就强行在python3下安装了tf。详情见该链接和这个:sudo apt update sudo apt install python3-catkin-pkg-modules python3-rospkg-modules python3-empy #准备一个catkin工作空间,因为都叫catkin_ws,我就把它和ros-bridge放同一个目录下了 mkdir -p ~/catkin_ws/src; cd ~/catkin_ws catkin_make source devel/setup.bash wstool init wstool set -y src/geometry2 --git https://github.com/ros/geometry2 -v 0.6.5 wstool up rosdep install --from-paths src --ignore-src -y -r #最后用Python3编译 catkin_make --cmake-args \\ -DCMAKE_BUILD_TYPE=Release \\ -DPYTHON_EXECUTABLE=/usr/bin/python3 \\ -DPYTHON_INCLUDE_DIR=/usr/include/python3.6m \\ -DPYTHON_LIBRARY=/usr/lib/x86_64-linux-gnu/libpython3.6m.so
-
至此编译通过后,ros和carla终于也连接到了一起!
完结撒花!可以好好工作了!
Carla 安装详细教程 —— Ubuntu 20.04 安装 Carla
Carla 安装详细教程 —— Ubuntu 20.04 安装 Carla
简介
自动驾驶算法的调试和效果评测首先要在仿真环境中去做,因此,一个强大、灵活的仿真环境是开发、测试过程中必不可少的要素。我们在查找可用的仿真工具时主要关注以下几个特性:
-
开源,免费;
-
包含高速场景;
-
可以便捷的控制、切换场景的环境,且场景、环境尽可能的丰富与真实;
-
可以便捷的控制、切换场景内移动物体(如车辆、行人等)的行为模式,且行为模式尽可能的丰富与真实;
第 1 条基本上把商用的软件排除掉了,如 PreScan,VTD 等······。事实上,在论文库的检索过程中,CARLA 的出现频率是最高的,因此本文将介绍该软件及其安装和使用方法
Carla 是一个自动驾驶仿真框架。具有如下特点:
-
环境基于 Unreal Engine 4 开发;
-
完全开源;
-
包含 C++ 和 Python 全部开放接口;
-
以 Carla 仿真环境为核心构建的仿真生态链逐步支持各种自动驾驶仿真标准或规则,比如支持 OpenDrive 和 OpenScenario 标准,支持 Responsibility Sensitive Safety(RSS);
-
以 Carla 仿真环境为核心构建的仿真生态链逐步支持各种自动驾驶工具或者框架比如 ROS, SUMO,PTV-Vissim 等;
-
产品更新迭代速度相对较快;
-
有英特尔,丰田,通用等大公司支持
Carla 官网如下:Carla
Carla国内资料和资源分享网站:Carla 中文站
Carla源码下载地址:Carla github 源码仓库
这里我们需要下载 ubuntu 对应的安装包
安装前准备
硬件环境
Carla 是一款基于 Ue4 开发的仿真模拟软件,所以对硬件的要求比较高,推荐配置如下:
Carla 官网推荐显存 8G, 内存最好大于 16G 硬盘大于 100G , 虽然没说 CPU 的要求,但是 CPU 最好也配一个好一点的,最好配十代 i7 以上的 CPU
CPU : I7 10750+
GPU:英伟达 2060+
内存:16G+
硬盘:1T
这里如果是使用 Ubuntu 安装 Carla,需要同时安装很多环境:Carla、Ue4、Conda3等,至少要有 250G 的空间才能够完成安装
软件环境
这里我们是在 Ubuntu 20.04 的环境下安装 Carla,所以这里我们需要安装好所有的环境:
首先是需要安装好 python3,这里的 python3 的版本目前是最好使用 3.8 的最新版本,这里提供在线安装的命令:
sudo apt update
sudo apt install software-properties-common
sudo add-apt-repository ppa:deadsnakes/ppa
udo apt install python3.8
python3.8 --version然后这里我们需要更新 pip3 到最新版本(这里的最低 pip3 版本要求是 20.3),这里由于我们使用的系统是 ubuntu 20.04,默认的 pip3 版本是 20.0.2,直接使用命令升级 pip3 是没有效果的,这里我们需要按照如下方法进行更新:
#首先直接升级 pip3,这里虽然升级后查询版本没有改变,但在后续操作会解决
sudo pip3 install --upgrade pip
#修改 .bashrc 文件
sudo gedit ~/.bashrc
#在文件末尾添加如下字段
export PATH=/home/cxx/.local/bin/:$PATH
#保存后执行刷新调用
source ~/.bashrc这样我们再次查看 pip3 的版本就已经更新到最新版本了:

python3 环境全部准备好之后,需要安装一些其他包
pip3 install --user pygame numpy
pip install --user setuptools &&
pip3 install --user -Iv setuptools==47.3.1 &&
pip install --user distro &&
pip3 install --user distro &&
pip install --user wheel &&
pip3 install --user wheel auditwheel如果在执行安装 setuptools 时报错如下:
ERROR: pip's dependency resolver does not currently take into account all the packages that are installed. This behaviour is the source of the following dependency conflicts.
launchpadlib 1.10.13 requires testresources, which is not installed.这里说明我们要更新 numpy 版本,然后按照提示安装 launchpadlib 后再安装:
pip3 install --upgrade numpy
pip3 install launchpadlib这里由于我们是使用 python 语言进行开发,苏哟一这里最重要的就是安装 python3 ,其他环境安装如下:
sudo apt-get update &&
sudo apt-get install wget software-properties-common &&
sudo add-apt-repository ppa:ubuntu-toolchain-r/test &&
wget -O - https://apt.llvm.org/llvm-snapshot.gpg.key|sudo apt-key add - &&
sudo apt-add-repository "deb http://apt.llvm.org/xenial/ llvm-toolchain-xenial-8 main" &&
sudo apt-get update这里不同系统版本对应不同的安装指令,可以去官网进行查看:How to build Carla on Ubuntu ,这里我们使用的是 Ubuntu 20.04 版本,命令如下:
sudo apt-add-repository "deb http://apt.llvm.org/focal/ llvm-toolchain-focal main"
sudo apt-get install build-essential clang-10 lld-10 g++-7 cmake ninja-build libvulkan1 python python-dev python3-dev python3-pip libpng-dev libtiff5-dev libjpeg-dev tzdata sed curl unzip autoconf libtool rsync libxml2-dev git
sudo update-alternatives --install /usr/bin/clang++ clang++ /usr/lib/llvm-10/bin/clang++ 180 &&
sudo update-alternatives --install /usr/bin/clang clang /usr/lib/llvm-10/bin/clang 180UE4 安装
由于 Carla 是基于 UE4 引擎进行开发的,所以在安装 Carla 前最终要的一步就是安装 UE4 ,这里在 CALAR 0.9.12 以后的版本使用的引擎是 Unreal Engine 4.26 。在安装 Carla 之前要安装好 Unreal Engine 4.26 。安装之前需要保证你的 github 账户和 Unreal Engine 账户连接。 连接方法可以参考下面链接:
https://www.unrealengine.com/en-US/ue-on-github
然后在这里我们需要点击 Follow:
如果这里没有点击,就不显示 UE4 源码仓库,无法 git clone 下载
除了两个账户之间的连接之外,还需要注意的是 git clone 过程中需要用 github 账户登入,但 github 从 2021 年开始不支持这种登入方式,需要设置个人密钥。github 的个人密钥设置有两种: fine-grained token 和 classic token,有些在使用 git clone 的时候没有提示要登陆,就跳过这部分。设置方法参考:
其实这里的意思就是用 token 代替密码使用,参考如下博客配置 token:
https://blog.csdn.net/qq_41646249/article/details/119777084
开始安装 UE4 :
git clone --depth 1 -b carla https://github.com/CarlaUnreal/UnrealEngine.git ~/UnrealEngine_4.26UE4 下载速度根据网络会有波动,耐心等待
如果执行 git clone 命令出现如下报错:
fatal: 无法访问 'https://github.com/CarlaUnreal/UnrealEngine.git/':GnuTLS recv error (-110): The TLS connection was non-properly terminated.需要执行如下操作来关掉 SSL :
apt-get install gnutls-bin
git config --global http.sslVerify false
git config --global http.postBuffer 1048576000编译 UE4
cd ~/UnrealEngine_4.26
./Setup.sh && ./GenerateProjectFiles.sh && make编译时间较长,需要耐心等待,如果在编译的过程中出现 register ubreal engine file types 的窗口,直接关掉即可
编译完成后,我们需要检查是否安装完成,使用如下命令:
cd ~/UnrealEngine_4.26/Engine/Binaries/Linux && ./UE4Editor如果成功打开并运行 UE4 就说明已经安装成功了
安装完,要把 UnrealEngine 的路径添加到 ~/.bashrc 中:
sudo gedit ~/.bashrc打开后在最后一行添加:
export UE4_ROOT=~/UnrealEngine_4.26安装 Carla
我们在一开始就已经下载了 ubuntu 对应的 Carla 的安装包,这里我们在 Home 目录下新建一个 CARLA 文件夹,并将刚下载好的压缩包解压到这个文件夹下,解压后如下:
按照官方给出的要求运行命令:
pip install carla
pip3 install carla安装完成直接运行如下命令测试:
cd ~/CARLA/CARLA_0.9.14
sudo ./CarlaUE4.sh如果报错如下:
CARLA/CARLA_0.9.13/CarlaUE4/Binaries/Linux/CarlaUE4-Linux-Shipping: error while loading shared libraries: libomp.so.5: cannot open shared object file: No such file or directory执行如下命令即可:
sudo apt-get install libomp5如果在运行的时候命令行出现如下内容:
MESA-INTEL: warning: Performance support disabled, consider syscrl dev. i9q5.perf_stream_paranoid=0说明 Carla 强制使用核显,这里我们要使用如下命令来使用独显:
sudo ./CarlaUE4.sh -prefernvidia示例演示
将弹出一个包含城市视图的窗口。 这是旁观者的观点。 要在城市中飞行,请使用鼠标和 WASD 键,按住鼠标右键来控制方向。
这是服务器模拟器,它现在正在运行并等待客户端连接并与世界交互。 您可以尝试一些示例脚本来为城市注入生命并驾驶汽车:
# Terminal A
cd PythonAPI\\examples
python3 -m pip install -r requirements.txt # Support for Python2 is provided in the CARLA release packages
python3 generate_traffic.py
# Terminal B
cd PythonAPI\\examples
python3 manual_control.py卡顿问题
这里由于对显卡的要求比较高,所以这里可以通过命令设置来解决一些 Carla 的卡顿问题
~/CARLA/CARLA_0.9.13$ ./CarlaUE4.sh -prefernvidia -quality-level=Low -benchmark -fps=15-prefernvidia:使用NVIDIA显卡启动
-quality-level=Low:调低渲染水平
-benchmark -fps=15:引擎以1/15秒的固定时间逐步运行
这里如果还是很卡,可以隐藏房屋建筑,仅留下道路,减少显卡渲染的任务量
方法:Shift+V 全选建筑物 Shift+B 隐藏所有建筑物
还有以下其余可使用的配置选项:
配置选项可用:
carla-rpc-port=N:侦听端口 N 处的客户端连接。默认情况下,流式端口 Streaming port 设置为 N+1
carla-streaming-port=N:指定用于传感器数据流的端口。 使用 0 获取随机未使用的端口。 第二个端口将自动设置为 N + 1
quality-level=Low,Epic:更改图形质量级别
-carla-server:让 carla以服务的方式运行
-benchmark -fps=15:引擎以1/15秒的固定时间逐步运行
-windowed -ResX=800 -ResY=600:屏幕窗口大小
以上是关于Ubuntu18.04配置carla0.9.11踩坑与解决方法总结,同时解决安装carla-ros-bridge遇到的问题,并复现OpenCDA成功与ros关联的主要内容,如果未能解决你的问题,请参考以下文章