PID的调节步骤分几步?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PID的调节步骤分几步?相关的知识,希望对你有一定的参考价值。
温度T: P=20~60%,Ti=180~600s,Td=3-180s ,压力P: P=30~70%,Ti=24~180s, 液位L: P=20~80%,Ti=60~300s, 流量L: P=40~100%,Ti=6~60s。 1. PID调试步骤 没有一种控制算法比PID调节规律更有效、更方便的了。现在一些时髦点的调节器基本源自PID。甚至可以这样说:PID调节器是其它控制调节算法。因为PID解决了自动控制理论所要解决的最基本问题,既系统的稳定性、快速性和准确性。调节PID的参数,可实现在系统稳定的前提下,兼顾系统的带载能力和抗扰能力,同时,在PID调节器中引入积分项,系统增加了一个零积点,使之成为一阶或一阶以上的系统,这样系统阶跃响应的稳态误差就为零。由于自动控制系统被控对象的千差万别,PID的参数也必须随之变化,以满足系统的性能要求。这就给使用者带来相当的麻烦,特别是对初学者。下面简单介绍一下调试PID参数的一般步骤:1.负反馈 自动控制理论也被称为负反馈控制理论。首先检查系统接线,确定系统的反馈为负反馈。例如电机调速系统,输入信号为正,要求电机正转时,反馈信号也为正(PID算法时,误差=输入-反馈),同时电机转速越高,反馈信号越大。其余系统同此方法。2.PID调试一般原则 a.在输出不振荡时,增大比例增益P。 b.在输出不振荡时,减小积分时间常数Ti。 c.在输出不振荡时,增大微分时间常数Td。

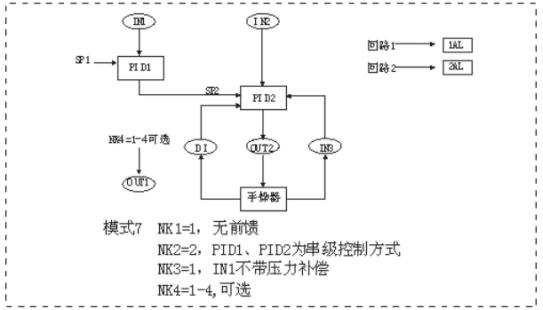
1、将PID调节器设定为手动模式,稳定测量值。2、测量值稳定后,在手动模式下阶段性地增大(或减小)输出信号,如下图所示记录流程响应数据,直到测量值稳定。
3、基于响应数据,通过下表求出PID参数后,利用PID调节器参数自整定确认控制结果。Ziegler Nichols的最佳PID参数在实际过程中无法得到阶段性响应数据时,采用此方法。(1)先将P、I设定为最大,D设定为最小,然后选择自动模式。(2)将P(增加调节增益)逐渐调小,到测量值开始振荡之前停止。(3)将I从最大逐渐减小,到测量值开始振荡之前停止。(4)将D从最小逐渐增大,到测量值开始振荡之前停止。(5)再次微调P,到测量值开始振荡之前停止。

控制分为很多种,PID控制又分为很多种。虽说调参思想基本上都大同小异,但细分的话一些小技巧还是有差异的,比如说单P、PI、PD、PID控制这些可以根据你获得的极限增益来确定kp,ki,kd的大概值,见——齐格勒。各种控制设备控制场合还还有各种小技巧,见“PID参数整定经典教材”或“PID参数整定教程”,输入类似字眼就会出现一大堆资料。还有一些比较高端点的整定方法。宗旨无非是为了让参数的获取更方便,控制更稳定,减小对(人)经验的依赖程度(不过再怎么理论怎么数字化也会有人的经验掺杂其中)。
速成记|安装PaddlePaddle到底分几步?
大家好,这是为新手同学特别准备的PaddlePaddle快速入门栏目
本栏目针对常见问题,将提供新手“炼丹师”们迅速入门的指南
带领大家从入门到进阶(not放弃)
今天从使用PaddlePaddle第一步——安装开始

和哪个版本的PaddlePaddle可以牵手成功,首先对自己的“英雄”要足够了解,尤其是这三个硬性条件
系统(Linux/Mac/Windows)
GPUorCPU
语言版本(Python 2.7.x)
按照系统划分,PaddlePaddle给大家提供了2种牵线方式
1.pip安装拥抱Linux(包括在其基础上开源的CentOS Ubuntu)
2.Docker安装拥抱Windows (需要借助虚拟机+Ubuntu)
Docker也可以通过源码实现
看清条件,确认过眼神,现在开始正式进入安装(牵线)
安装指令结构:
pip install paddlepaddle
pip install paddlepaddle==0.11.0
pip install paddlepaddle gpu
pip install paddlepaddle-gpu==0.12.0
概括起来:
pip install paddlepaddle==版本号(CPU)
pip install paddlepaddle-gpu==版本号(GPU)
目前版本如下图所示,详情介绍可以到官网查看,目前最新版是0.12.0

运行环境条件,除了Python2.7.x,其他版本也需要注意
友情提示:
1.用pip安装GPU版本PaddlePaddle,需要手动安装CUDA和CUDNN
2.目前12.0版本同时包括V2和Fluid版本
安装文档详解版+详细代码,可参见
如果使用的是Windows,安装PaddlePaddle需要如下环节的准备
Step1: 在Windows里安装虚拟机
可选择开源Virtualbox安装 https://www.virtualbox.org/
Step2: 在虚拟机中安装Linux(Ubuntun)
创新虚拟硬盘-选择动态分配硬盘-安装
Step3: 在Ubuntun中安装Docker(或Ubuntun中安装Docker)
这里提供两个Docker的学习链接:
1)Docker官网
https://docs.docker.com/get-started/
2)Docker入门(知乎专栏)
https://zhuanlan.zhihu.com/p/19902938
Step4: Docker中安装Paddle镜像
docker pull paddlepaddle/paddle
docker pull docker.paddlepaddlehub.com/paddle
docker pull paddlepaddle/paddle:latest-gpu docker pull docker.paddlepaddlehub.com/paddle:latest-gpu
# 默认是使用MKL的镜像
docker pull paddlepaddle/paddle
# 使用OpenBLAS的镜像
docker pull paddlepaddle/paddle:latest-openblas
docker pull paddlepaddle/paddle:[tag]
# 比如:
docker pull docker.paddlepaddlehub.com/paddle:0.11.0-gpu
(左右滑动可看完整代码)
以上镜像代码依次是CPU最新版本、国内加速访问版、GPU版本、BLAS库的Docker镜像以及DockerHub指定版
安装Docker后,需要进行源码获取和PaddlePaddle Book调用
此部分详细内容可参照以往文章:
友情提示:
安装出bug,可从开篇所述的三个方面找找原因
更多安装细节的问题,可到PaddlePaddle中文社区发帖提问
别忘了近期发帖+回复赢PaddlePaddle限量纪念品!
内容来源:夜雨飘零CSDN博客(https://blog.csdn.net/qq_33200967?categoryid=7404300)
PaddlePaddle官网
点击“阅读原文” 一键直达PaddlePaddle中文社区!
以上是关于PID的调节步骤分几步?的主要内容,如果未能解决你的问题,请参考以下文章