java语言UWB定位系统源码,idea VS Code+MYSQL开发
Posted 淘源码A
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了java语言UWB定位系统源码,idea VS Code+MYSQL开发相关的知识,希望对你有一定的参考价值。
开发语言:JAVA
开发工具:idea 、VS Code
数 据 库:mysql
前端框架:Vue
后端框架:Spring boot
技术架构:单体服务 + 硬件(UWB定位基站、卡牌)
全套源码码,可直接上手项目
文末卡片获取联系!
系统采用UWB高精度定位技术,可实现厘米级别定位。UWB作为一种高速率、低功耗、高容量的新兴无线局域定位技术,目前应用主要聚焦在室内外精确定位。在工业自动化、物流仓储、电力巡检、煤矿施工、自动驾驶等领域得到广泛使用。
系统利用通讯网络作为主传输平台,相应的定位基站、定位工牌等设备与系统挂接,通过管理软件与主系统以标准的专用数据库进行后台数据交换从而实现区域目标的跟踪定位和安全管理。
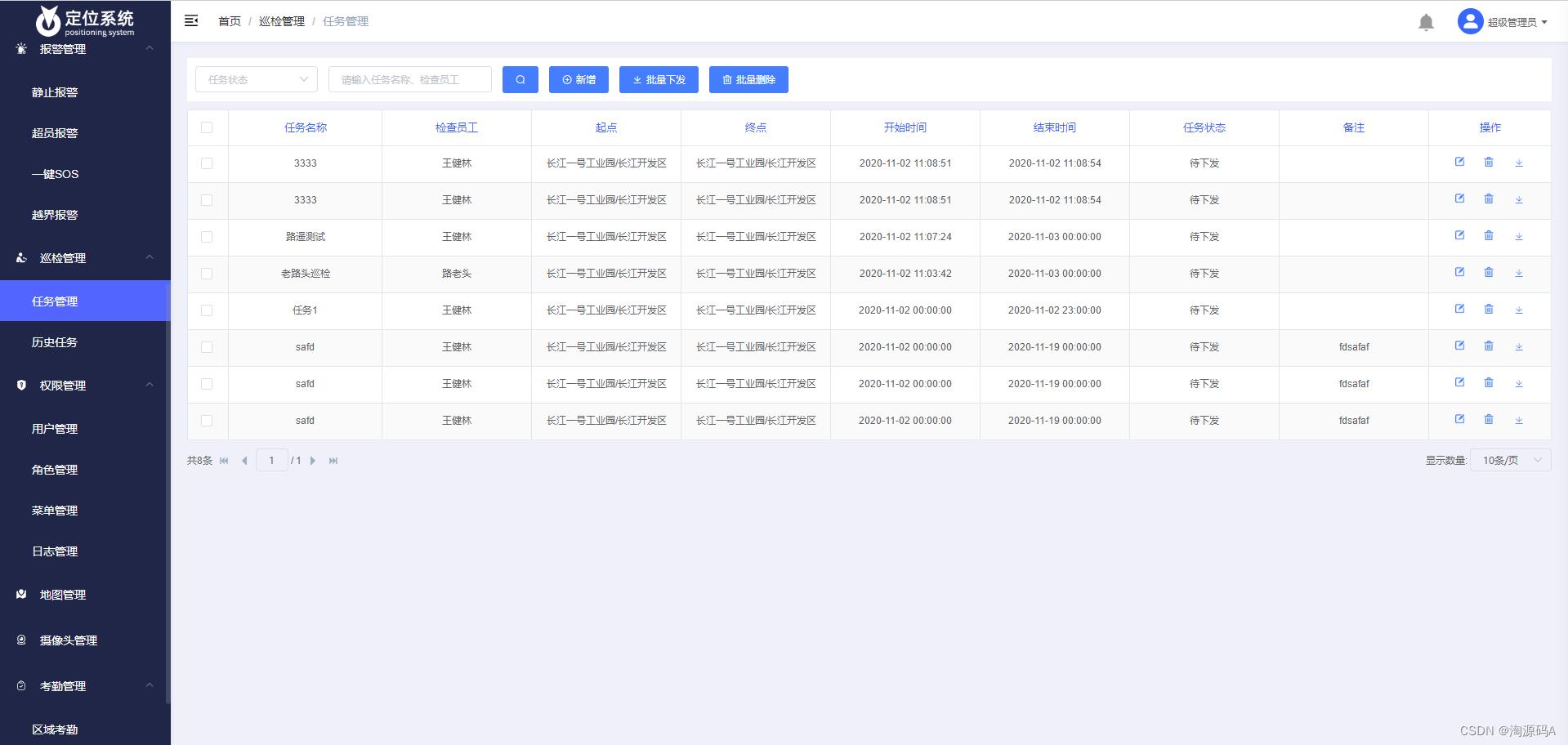
系统功能特点:
实时定位
◆ 实时获取人员/物资/车辆位置、分布及活动轨迹;
◆ 物资、车辆数量可实时查询,实现全自动化管理;
◆ 智能寻找物资、车辆,提高工作效率,实现合理调度。
智能考勤与工时统计
◆ 智能考勤:自动记录厂区人员考勤信息;
◆ 工时统计:统计各时间段内的个人或部门工作时长信息;
◆ 数据导出:按人员信息分类查询、打印考勤信息,生成考勤报表。
行为监测
◆ 对区域内人员实施行为监测,有效防止串岗/脱岗、超员/缺员等;
◆ 人员滞留超过一定时间报警提醒,自定义设置滞留区域和时间;
◆ 多人聚众/无人值守报警提醒,自定义安全聚众人数;
◆ 人员静止超过一定时间报警提醒,自定义界限时间。
电子围栏
◆ 可灵活设定电子围栏形状、报警规则 以及进出权限;
◆ 对无权限进出危险区域人员进行报警管理,确保人员的安全活动范围。
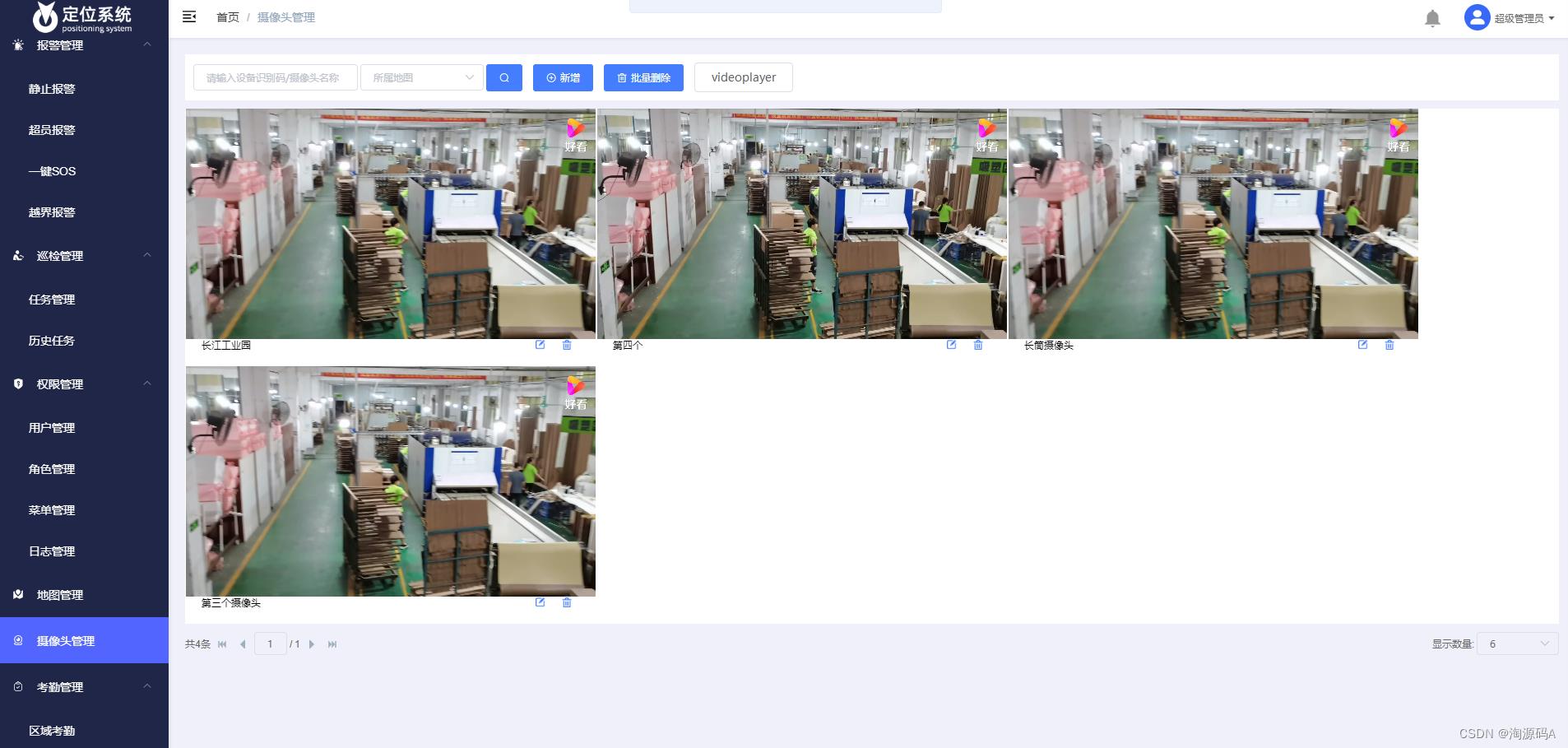
视频联动、可视化数据分析
◆ 联动监控系统对重点区域进行视频监控,提高预警能力;
◆ 针对告警事件保留视频记录,为事件处理提供依据;
◆ 人员效率分析、物资分布统计,实现人员合理调度仓储物资合理利用。
历史轨迹储存和回放
◆ 轨迹储存:无时限存储人员运动轨迹,为事件处理提供决策依据;
◆ 轨迹回放:可按人员或区域回放指定时间段内的人员/车辆运动轨迹。
目标定位基于matlab卡尔曼滤波UWB-IMU组合定位导航含Matlab源码 1601期
一、简介
针对室内定位中的非视距(Non-Line-of-Sight,NLOS)现象,提出一个新型算法进行识别,同时有效缓解其影响.主要通过超宽带(Ultra-Wideband,UWB)定位系统与惯性导航系统(Inertial Navigation System,INS)的信息修正非视距误差,获得较高的定位精度.首先,在离线阶段获得不同障碍物下的NLOS误差概率分布曲线;其次,利用惯性测量单元(Inertial Measurement Unit,IMU)的预测位置及NLOS误差概率曲线修正测量距离;最后,利用卡尔曼滤波(Kalman Filtering,KF)融合步行者航迹推算(Pedestrian Dead Reckoning,PDR)的INS位置和经过改进最小二乘法(Least Square,LS)处理后UWB定位系统的位置,并更新NLOS误差获得更准确的位置估计.通过仿真和实验证实了提出的定位算法可以有效缓解NLOS误差,提升定位性能,实现在NLOS影响下的高精度定位.
二、部分源代码
%%
clc
clear all
close all
global UKF;
addpath('ekfukf');
load('ground_truth.mat')
% Measurement model and it's derivative
f_func = @ukf_ins_f;
df_dx_func = @ekf_err_ins_f;
h_func = @ekf_uwb_h;
dh_dx_func = @ekf_err_uwb_h;
% anchor position
UKF.BSOneCoordinate = [9.21;1.08;-0.17];%4.08
UKF.BSTwoCoordinate = [0;0;-1.885];
UKF.BSThreeCoordinate = [0;6.281;-1.37];
UKF.BSFourCoordinate = [1.705;12.88;-2.27];
UKF.BSFiveCoordinate = [9.31;11.59;-0.52];
UKF.BaseS_Position = [UKF.BSOneCoordinate,UKF.BSTwoCoordinate,...
UKF.BSThreeCoordinate,UKF.BSFourCoordinate,...
UKF.BSFiveCoordinate]*30;
UKF.bSPcs = 5;
% download the sensor data
matfile = dir('*_HandledFileToMatData.mat');
if isempty(matfile)
disp(' None Found *_HandledFileToMatData.mat')
end
for ki=1:size(matfile)
load(matfile(ki).name)
end
% initialization
ProcessNoiseVariance = [3.9e-04 4.5e-4 7.9e-4; %%%Accelerate_Variance
1.9239e-7, 3.5379e-7, 2.4626e-7;%%%Accelerate_Bias_Variance
8.7e-04,1.2e-03,1.1e-03; %%%Gyroscope_Variance
1.3111e-9,2.5134e-9, 2.4871e-9 %%%Gyroscope_Bias_Variance
];
Q = [
diag(ProcessNoiseVariance(1,:)),zeros(3,12);
zeros(3,3), diag(ProcessNoiseVariance(1,:)),zeros(3,9);
zeros(3,6), diag(ProcessNoiseVariance(3,:)),zeros(3,6);
zeros(3,9), diag(ProcessNoiseVariance(2,:)),zeros(3,3);
zeros(3,12), diag(ProcessNoiseVariance(4,:))];
MeasureNoiseVariance =[2.98e-03,2.9e-03,...
1.8e-03,1.2e-03,...
2.4e-03];%%%%UWB ranging noise
R = diag(MeasureNoiseVariance);
Position_init =[20;100;-1.9]; deta_Position_init = [0;0;0];
Speed_init = [0;0;0]; deta_Speed_init = [0;0;0];
Accelerate_Bias_init = [0;0;0]; deta_Accelerate_Bias_init = [0;0;0];
Gyroscope_Bias_init = [0;0;0]; deta_Gyroscope_Bias_init = [0;0;0];
Quaternion_init = [1,0,0,0]'; deta_Quaternion_init = [0;0;0;0];
% state init x0 and P0
X0 = [Position_init;Speed_init;Accelerate_Bias_init;Gyroscope_Bias_init;Quaternion_init];
StaticBiasAccelVariance =[6.7203e-5, 8.7258e-5, 4.2737e-5];
StaticBiasGyroVariance = [2.2178e-5, 5.9452e-5, 1.3473e-5];
init_c = 0.1;
P0 = [init_c*eye(3,3),zeros(3,12);
zeros(3,3) , 1e-2*init_c*eye(3,3),zeros(3,9);
zeros(3,6), 1e-2*init_c* eye(3,3),zeros(3,6);
zeros(3,9), diag(StaticBiasGyroVariance),zeros(3,3);
zeros(3,12), diag( StaticBiasAccelVariance);
]; %%%
% Initial guesses for the state mean and covariance.
X = [2;2;-3;zeros(3,1);10/180*pi;-10/180*pi;20/180*pi;...
sqrt(StaticBiasAccelVariance').*randn(3,1);
sqrt(StaticBiasGyroVariance').*randn(3,1)
];
dX = [zeros(9,1);
sqrt(StaticBiasAccelVariance').*randn(3,1);
sqrt(StaticBiasGyroVariance').*randn(3,1)];
P = P0;
imu_iter = 1;
uwb_iter = 1;
dt = 0.02;
Pcs = length(SampleTimePoint);
ISPUTCHAR = 0;
% Reserve space for estimates.
MM = zeros(size(X,1),Pcs);
PP = zeros(size(X,1),size(X,1),Pcs);
Invation = zeros(5,Pcs);
UWBXYZ = [];noise=[];
% Estimate with EKF
for k=1:Pcs
uk = [a_vector(imu_iter,:)';g_vector(imu_iter,:)'/180*pi];
% Track with (nonaugmented) UKF
[X,P] = ukf_predict1(X,P,f_func,Q,[dt;uk]);
if ISPUTCHAR == 1
cprintf('text', 'T: %0.3fs, L [%0.2f %0.2f %0.2f]m, V [%0.3f %0.3f %0.3f]m/s ,Pl [%0.5f %0.5f %0.5f],Pv [%0.5f %0.5f %0.5f]m/s^2\\n',...
SampleTimePoint(imu_iter) ,X(1),X(2),X(3),X(4),X(5),X(6),P(1,1),P(2,2),P(3,3),P(4,4),P(5,5),P(6,6));
end
%%% Update
if uwb_iter <= length(UWBBroadTime_vector) && UWBBroadTime_vector(uwb_iter)== SampleTimePoint(imu_iter)
Z_meas = Uwbranging_vector(uwb_iter,:)';
%%%add the noise
outlier = zero_one_distribution(0.1)';
% outlier = zeros(5,1); %% you could ignore annotation without outlier
Z_meas = Z_meas + outlier;
noise = [noise,outlier];
[X,P] = ukf_update1(X,P,Z_meas,h_func,R);
%% is equal with ukf_update1(...)
% [~,H] = dh_dx_func(X);
% %%5个基站同时测距
% K = P*H'*inv(H*P*H'+R);
% dX = K*(Z_meas - h_func(X));Invation(:,k) = Z_meas - h_func(X);
% P = P - K*H*P;
% %%%%%1个基站测距值
% H_ = H(bS,:);
% K = P*H_'*inv(H_*P*H_'+R(bS,bS));
% INVT = Z_meas - h_func(X);
% dX = K*INVT(bS);
% P = P - K*H_*P;
%feedback
% X = X + dX;
%%
if ISPUTCHAR == 1
cprintf('err', 'T: %0.3fs, L [%0.2f %0.2f %0.2f]m, V [%0.3f %0.3f %0.3f]m/s ,Pl [%0.5f %0.5f %0.5f],Pv [%0.5f %0.5f %0.5f]m/s^2\\n\\n\\n',...
UWBBroadTime_vector(uwb_iter) ,X(1),X(2),X(3),X(4),X(5),X(6),P(1,1),P(2,2),P(3,3),P(4,4),P(5,5),P(6,6));
end
uwb_iter = uwb_iter + 1;
end
MM(:,k) = X;
PP(:,:,k) = P;
imu_iter = imu_iter + 1;
end
MM(7:9,:)= MM(7:9,:)/pi*180;
noise = noise';
for uwb_iter=1:4:length(UWBBroadTime_vector)-10
Z_meas = diag(Uwbranging_vector(uwb_iter:uwb_iter+4,:) + noise(uwb_iter:uwb_iter+4,:)) ;
uwbxyz = triangulate(Z_meas);
UWBXYZ = [UWBXYZ,[UWBBroadTime_vector(uwb_iter+2);uwbxyz;TraceData(4*(uwb_iter+2)+1,2:4)']];
end
%-------------- figure 1: display trajectory ----------------------%
base = 1;
figure(1)
subplot(311)
plot(TraceData(:,1),TraceData(:,base+1),'g.')
hold on
plot(SampleTimePoint(1:Pcs),MM(base,:),'m')
plot(UWBXYZ(1,:),UWBXYZ(2,:),'k')
title('Position x Axis');xlabel('T:s');ylabel('X axis:m');grid on;
legend('Real Trajectory','UWB-IMU Trajectory','UWB Trajectory')
subplot(312)
plot(TraceData(:,1),TraceData(:,base+2),'g.')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+1,:),'m')
plot(UWBXYZ(1,:),UWBXYZ(3,:),'k')
title('Position y Axis');xlabel('T:s');ylabel('Y axis:m');grid on;
legend('Real Trajectory','UWB-IMU Trajectory','UWB Trajectory')
subplot(313)
plot(TraceData(:,1),TraceData(:,base+3),'g.')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+2,:),'m')
plot(UWBXYZ(1,:),UWBXYZ(4,:),'k')
title('Position z Axis');xlabel('T:s');ylabel('Z axis:m');grid on;
legend('Real Trajectory','UWB-IMU Trajectory','UWB Trajectory')
%-------------- figure 2: display trajectory error -----------------%
base = 1;
figure(2)
subplot(331)
plot(SampleTimePoint(1:Pcs),MM(base,:)'- TraceData(:,base+1),'m');
hold on
plot(UWBXYZ(1,:),UWBXYZ(2,:) - UWBXYZ