学习笔记计算机视觉与深度学习(3.卷积与图像去噪/边缘提取/纹理表示)
Posted xhyu61
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了学习笔记计算机视觉与深度学习(3.卷积与图像去噪/边缘提取/纹理表示)相关的知识,希望对你有一定的参考价值。
学习视频:
鲁鹏-计算机视觉与深度学习
同系列往期笔记:
【学习笔记】计算机视觉与深度学习(1.线性分类器)
【学习笔记】计算机视觉与深度学习(2.全连接神经网络)
1 卷积
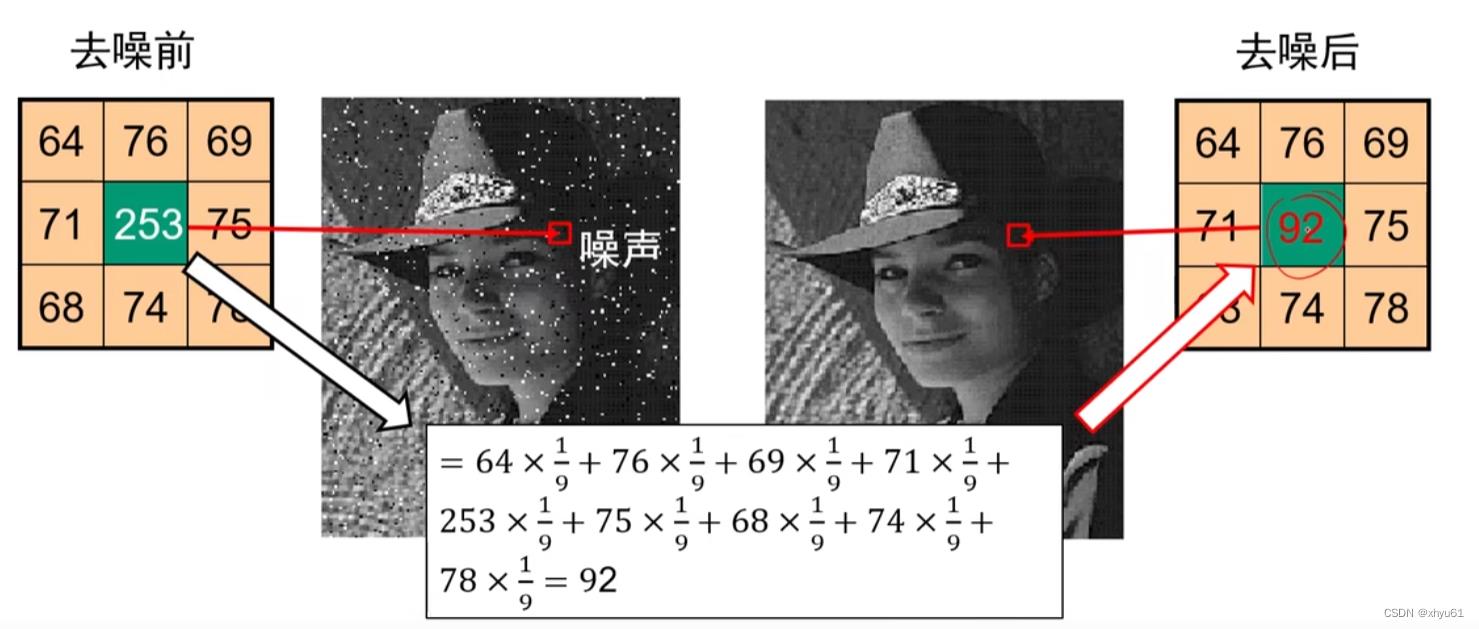
噪声点:该点的像素和周围像素点的差异很大,如图中左图的253。
通过以该点为中心的9个点的像素值取均值来替代该点原本的像素值。

加权的权值
1
9
\\frac19
91,我们通常存储在一个上面这样的模板当中,我们称这个模板为卷积核,也称滤波核。
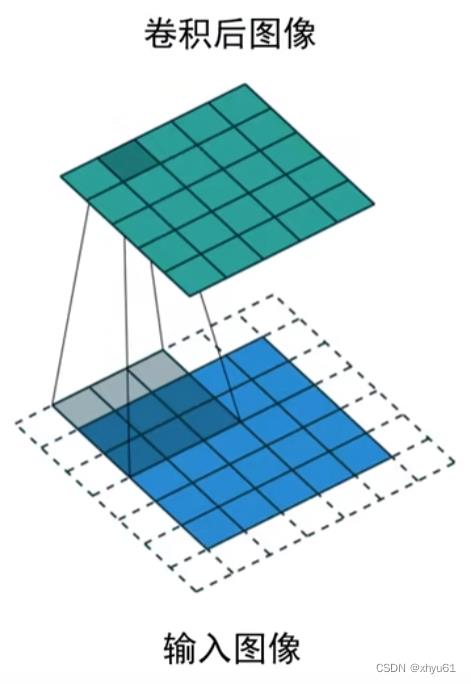
下面的蓝色是输入的图像,上面的绿色是卷积后得到的输出图像。每一个像素点都有一个卷积核,通过卷积核得到输出的像素值。
令
F
F
F为图像,
H
H
H为卷积核,
F
F
F与
H
H
H的卷积即为
R
=
F
∗
H
R=F*H
R=F∗H。
R
i
j
=
∑
u
,
v
H
i
−
u
,
j
−
v
F
u
,
v
R_ij=\\displaystyle\\sum\\limits_u,v H_i-u,j-vF_u,v
Rij=u,v∑Hi−u,j−vFu,v
进行卷积操作前,我们要先对卷积核进行180°翻转。不过通常我们使用卷积时,卷积核都是对称的,所以后续不会强调翻转操作。
公式略抽象,举例说明。令:
F
=
[
a
0
,
0
a
0
,
1
a
0
,
2
a
1
,
0
a
1
,
1
a
1
,
2
a
2
,
0
a
2
,
1
a
2
,
2
]
H
=
[
b
−
1
,
−
1
b
−
1
,
0
b
−
1
,
1
b
0
,
−
1
b
0
,
0
b
0
,
1
b
1
,
−
1
b
1
,
0
b
1
,
1
]
F= \\beginbmatrix a_0,0 & a_0,1 & a_0,2 \\\\ a_1,0 & a_1,1 & a_1,2 \\\\ a_2,0 & a_2,1 & a_2,2 \\endbmatrix \\ \\ \\ H= \\beginbmatrix b_-1,-1 & b_-1,0 & b_-1,1 \\\\ b_0,-1 & b_0,0 & b_0,1 \\\\ b_1,-1 & b_1,0 & b_1,1 \\endbmatrix
F=
a0,0a1,0a2,0a0,1a1,1a2,1a0,2a1,2a2,2
H=
b−1,−1b0,−1b1,−1b−1,0b0,0b1,0b−1,1b0,1b1,1
卷积后可以得到:
R i j = a 0 , 0 b 1 , 1 + a 0 , 1 b 1 , 0 + a 0 , 2 b 1 , − 1 + a 1 , 0 b 0 , 1 + a 1 , 1 b 0 , 0 + a 1 , 2 b 0 , − 1 + a 2 , 0 b − 1 , 1 + a 2 , 1 b − 1 , 0 + a 2 , 2 b − 1 , − 1 \\beginaligned R_ij&=a_0,0b_1,1+a_0,1b_1,0+a_0,2b_1,-1 \\\\ &+a_1,0b_0,1+a_1,1b_0,0+a_1,2b_0,-1 \\\\ &+a_2,0b_-1,1+a_2,1b_-1,0+a_2,2b_-1,-1 \\endaligned Rij=a0,0b1,1+a0,1b1,0+a0,2b1,−1+a1,0b0,1+a1,1b0,0+a1,2b0,−1+a2,0b−1,1+a2,1b−1,0+a2,2b−1,−1
综上,通过这个公式,我们就可以使用 H H H将 F F F卷积到 R R R域上去。
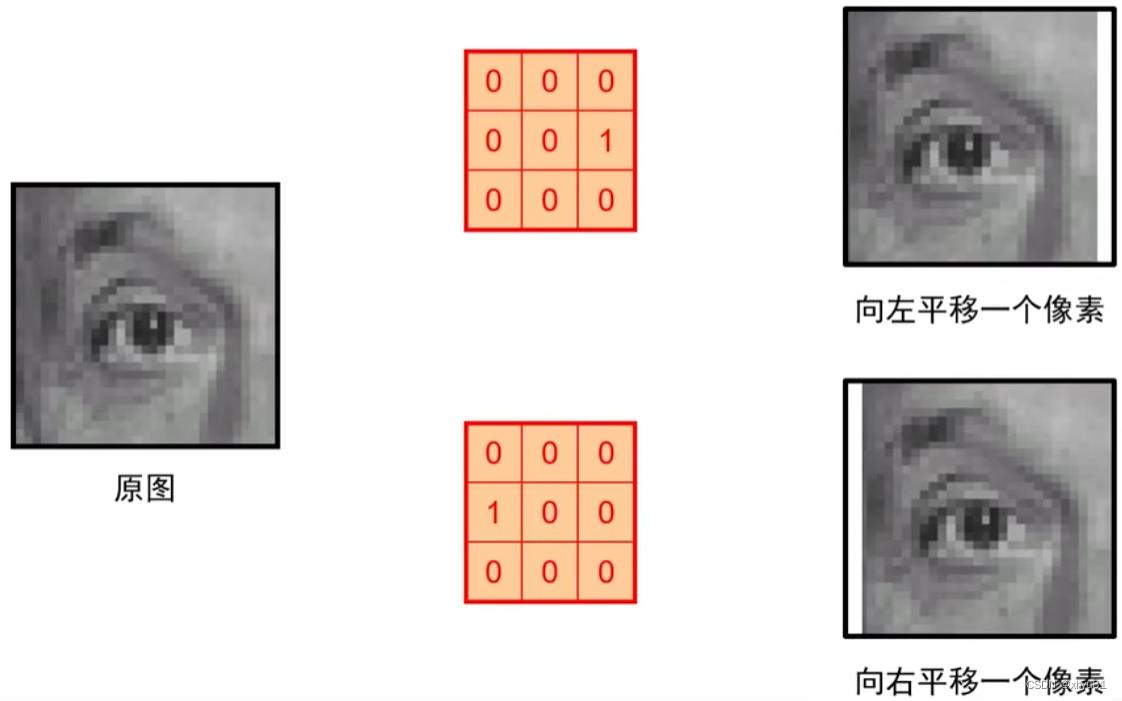
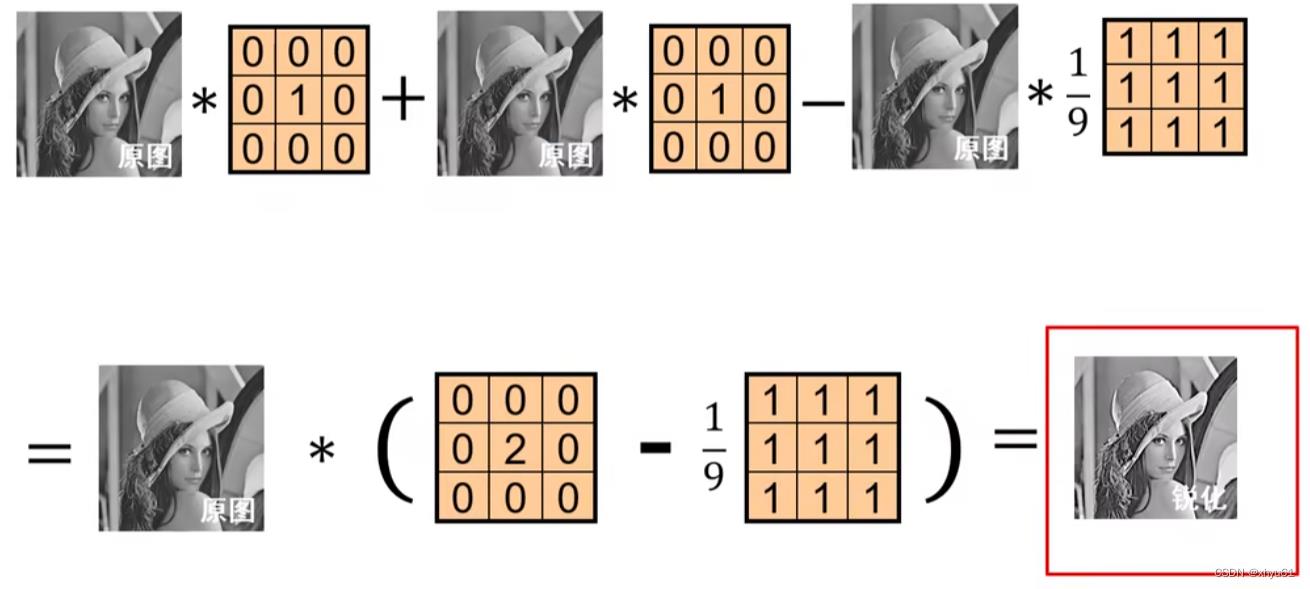
卷积示例


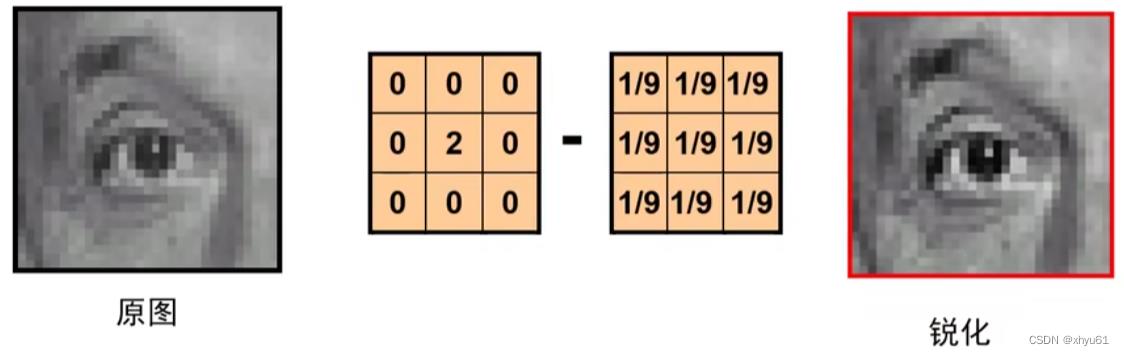
锐化原理见下图

更好地理解卷积所起到的滤波器的效果,可以参考这个网站:
Image-Kernels
卷积的性质
令
f
i
f_i
fi为卷积前的图像,
f
i
l
t
e
r
(
f
i
)
filter(f_i)
filter(fi)为卷积后的图像,
s
h
i
f
t
(
f
i
)
shift(f_i)
shift(f计算机视觉与深度学习 笔记EP1
主要资料来源:(P1-P3)计算机视觉与深度学习 北京邮电大学 鲁鹏 清晰版合集(完整版)_哔哩哔哩_bilibili
数据驱动的图像分类方法
数据集收集
-
数据集划分与预处理
训练集:确定超参数时对分类器参数进行学习
验证集:用于选择超参数
测试集:评估泛化能力
k折交叉验证:
数据预处理1(去均值和归一化): 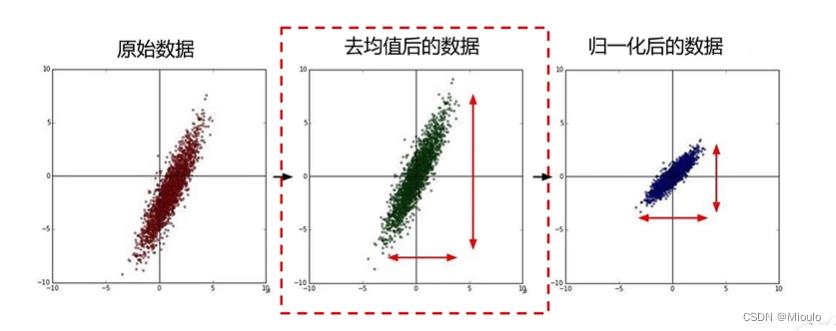
去均值:度量与平均值之间的差距
归一化:将数据映射在一个区间内,是数值范围几乎相等
参考和其他数据预处理方法:数据预处理的几个名词:中心化,归一化,去相关,白化_m0_37708267的博客-CSDN博客_去相关处理
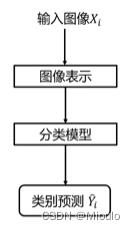
分类器的设计与学习
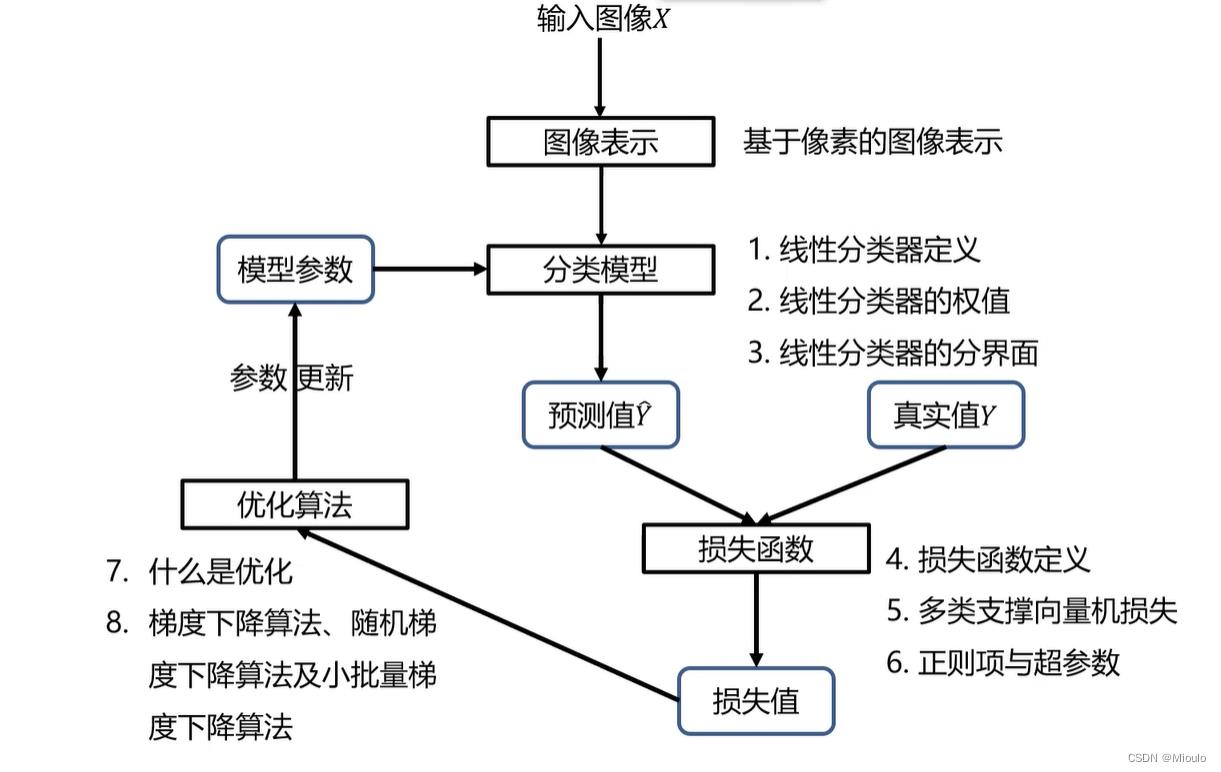
图像表示
- 像素表示:RGB三通道表示、灰度图像单通道表示、二值化图像
- 全局特征表示(GIST):在全图中抽取特征,如颜色特征、纹理特征、形状特征。如强度直方图。
- 局部特征表示:分割区块然后分析各区块的特征(优点是不会因遮挡受影响)
分类模型
- 线性分类器

x是输入的图像向量,i取不同的值代表第i个类别
w即是这类线性分类器的权值向量,b为这类线性分类器的偏置
w与b通过训练更新和优化
决策时,取f权值最大的类,就决策该图像向量属于这个类
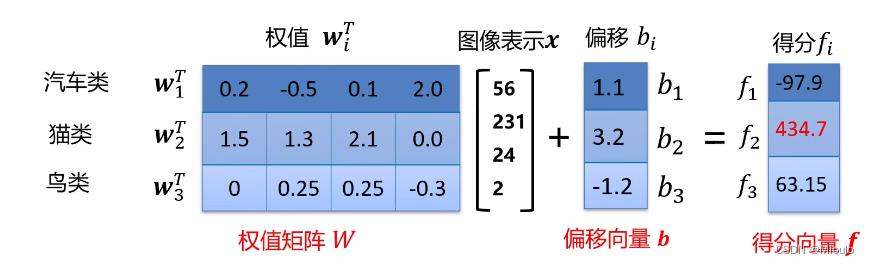

矩阵表示后,f、W、b变为一个矩阵,行数维度取决于其类别个数

示例:一个训练完成的权值向量矩阵,包含了10个类
- 神经网络分类器
(待整理)
损失函数
损失函数时一个函数,度量分裂器预测值与真实值的差异程度,通常规定输出为一个非负实数
L为数据集损失,是数据集中所有样本损失的平均值
接下来,确定恰当合适的L函数是训练出一个好的分类器的关键
- 多类支撑向量机损失(损失函数的一种)
预测分数的定义如下:

第i个样本的多类支撑向量损失函数的定义如下:

函数解读:即正确类别的得分比这个样本的其他的不正确类别高出1分,记为损失为0,否则产生损失并计算出值L
- 正则项损失

使用原因:对于矩阵W,可能会出现两个列向量w使损失函数为0,此时无法作出决策,因此添加一个正则项损失λR(W)来解决这个问题。该值只与权值向量有关
λ作为一个超参数(指机器学习过程之前就设置的参数,不是通过训练得到的参数数据,与W区分开来),控制正则损失在总损失中的占比
L2正则项:

k,l表示第k行第l列
函数解读:发现这个正则损失函数描述的是权值向量的分散程度,越分散,这个损失越小(越分散,我们可以理解成考虑了更多维度的特征,集中的话可能只是用了某个维度的特征,从而使决策有偶然性)以此来解决数据损失相等的情况
优化算法
参数优化:利用损失函数的输出值作为反馈信号来调整分类器的参数,提高分类器预测性能
L是一个关于参数W的函数,我们要找到使损失函数L达到最优的那组参数W使 
- 梯度下降
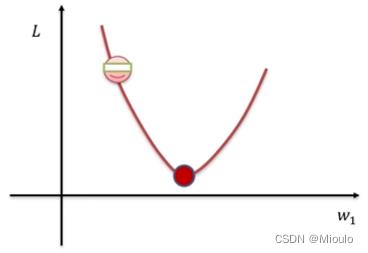
沿着负梯度方向行进(步长),会是损失函数最快达到极值(极小值),从而使这个分类器达到最好的状态,这种思路即是梯度下降优化算法
损失函数的梯度:

注意:计算出来的是一个矩阵向量
设定一个超参数学习率μ,以此定义步长然后更新权值
即:新权值=旧权值-学习率*权值的梯度
- 随机梯度下降
每次随机选择一个样本然后更新梯度(比如200个样本,并不是用200个样本更新一次梯度/参数,而是每次用1个样本更新200次梯度/参数)
- 小批量随机梯度下降
设定一个超参数m(代表每次选取m个样本)再进行训练更新参数
m通常取32、64、128等2的倍数
参考:(4条消息) 数值优化:一阶和二阶优化算法(Pytorch实现)_「已注销」的博客-CSDN博客
分类器决策
以上是关于学习笔记计算机视觉与深度学习(3.卷积与图像去噪/边缘提取/纹理表示)的主要内容,如果未能解决你的问题,请参考以下文章
斯坦福CS231n—深度学习与计算机视觉----学习笔记 课时26&&27