OpenCV 例程200篇92. 指数噪声均匀噪声椒盐噪声
Posted YouCans
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV 例程200篇92. 指数噪声均匀噪声椒盐噪声相关的知识,希望对你有一定的参考价值。
【OpenCV 例程200篇】92. 指数噪声、均匀噪声、椒盐噪声
欢迎关注 『OpenCV 例程200篇』 系列,持续更新中
欢迎关注 『Python小白的OpenCV学习课』 系列,持续更新中
2. 噪声模型
数字图像中的噪声源主要来自图像获取和传输过程。在获取图像时,光照水平和传感器温度影响图像中的噪声。在传输图像时,传输信道中的干扰对图像产生污染。
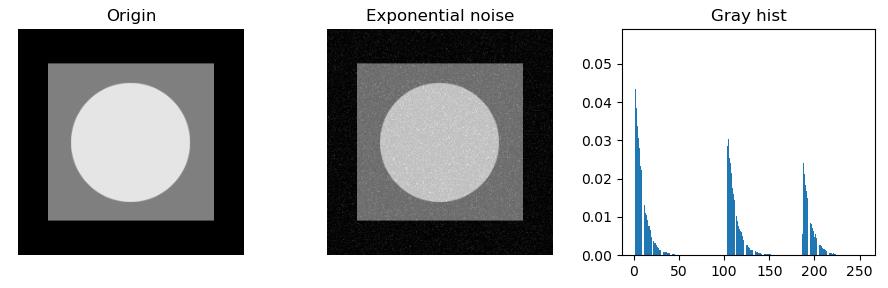
2.4 指数噪声 (Exponential Noise)
指数噪声的概率密度函数为
p
(
z
)
=
a
e
−
a
z
,
z
≥
0
0
,
z
<
0
p(z) = \\begincases ae^-az &, z \\ge 0\\\\ 0&, z < 0 \\endcases
p(z)=ae−az0,z≥0,z<0
指数噪声的均值和标准差为:
z
ˉ
=
1
/
a
σ
2
=
1
/
a
2
\\barz = 1/a \\\\ \\sigma ^2 = 1/a^2
zˉ=1/aσ2=1/a2
显然,指数噪声是爱尔兰噪声在 b=1 时的特殊情况。
例程 9.4:指数噪声 (Exponent Noise)
# # 9.4:指数噪声 (Exponential noise)
img = cv2.imread("../images/Fig0503.tif", 0) # flags=0 读取为灰度图像
# img = np.ones([256, 256]) * 128
a = 10.0
noiseExponent = np.random.exponential(scale=a, size=img.shape)
imgExponentNoise = img + noiseExponent
imgExponentNoise = np.uint8(cv2.normalize(imgExponentNoise, None, 0, 255, cv2.NORM_MINMAX)) # 归一化为 [0,255]
plt.figure(figsize=(9, 3))
plt.subplot(131), plt.title("Origin"), plt.axis('off')
plt.imshow(img, 'gray', vmin=0, vmax=255)
plt.subplot(132), plt.title("Exponential noise"), plt.axis('off')
plt.imshow(imgExponentNoise, 'gray')
plt.subplot(133), plt.title("Gray hist")
histNP, bins = np.histogram(imgExponentNoise.flatten(), bins=255, range=[0, 255], density=True)
plt.bar(bins[:-1], histNP[:])
plt.tight_layout()
plt.show()
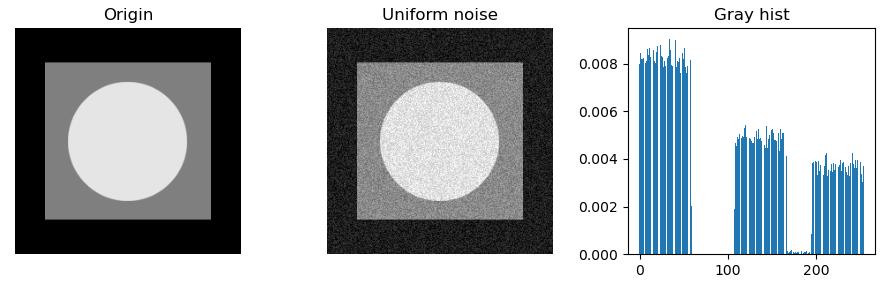
2.5 均匀噪声 (Uniform Noise)
均匀噪声的概率密度函数为
p
(
z
)
=
1
/
(
b
−
a
)
,
a
≤
z
≤
b
0
,
o
t
h
e
r
p(z) = \\begincases 1/(b-a) &, a \\le z \\le b\\\\ 0&, other \\endcases
p(z)=1/(b−a)0,a≤z≤b,other
均匀噪声的均值和标准差为:
z
ˉ
=
(
a
+
b
)
/
2
σ
2
=
(
b
−
a
)
2
/
12
\\barz = (a+b)/2 \\\\ \\sigma ^2 = (b-a)^2/12
zˉ=(a+b)/2σ2=(b−a)2/12
例程 9.5:均匀噪声 (Uniform Noise)
# # 9.5:均匀噪声 (Uniform noise)
img = cv2.imread("../images/Fig0503.tif", 0) # flags=0 读取为灰度图像
# img = np.ones([256, 256]) * 128
mean, sigma = 10, 100
a = 2 * mean - np.sqrt(12 * sigma) # a = -14.64
b = 2 * mean + np.sqrt(12 * sigma) # b = 54.64
noiseUniform = np.random.uniform(a, b, img.shape)
imgUniformNoise = img + noiseUniform
imgUniformNoise = np.uint8(cv2.normalize(imgUniformNoise, None, 0, 255, cv2.NORM_MINMAX)) # 归一化为 [0,255]
plt.figure(figsize=(9, 3))
plt.subplot(131), plt.title("Origin"), plt.axis('off')
plt.imshow(img, 'gray', vmin=0, vmax=255)
plt.subplot(132), plt.title("Uniform noise"), plt.axis('off')
plt.imshow(imgUniformNoise, 'gray')
plt.subplot(133), plt.title("Gray hist")
histNP, bins = np.histogram(imgUniformNoise.flatten(), bins=255, range=[0, 255], density=True)
plt.bar(bins[:-1], histNP[:])
plt.tight_layout()
plt.show()
2.6 椒盐噪声 (Salt-pepper Noise)
椒盐噪声的概率密度函数为
p
(
z
)
=
P
s
,
z
=
2
k
−
1
P
p
,
z
=
0
1
−
(
P
s
+
P
p
)
,
z
=
V
p(z) = \\begincases Ps &, z = 2^k -1 \\\\ Pp &, z = 0 \\\\ 1-(Ps+Pp)&, z = V \\endcases
p(z)=⎩⎪⎨⎪⎧PsPp1−(Ps+Pp),z=2k−1,z=0,z=V
当 Ps、Pp 都不为 0 时,噪声值是白色的 ( 2 k − 1 ) (2^k-1) (2k−1) 或黑色的 ( 0 ) (0) (0),就像盐粒或胡椒粒那样随机地分布在整个图像上,因此称为椒盐噪声,也称为双极冲击噪声。当 Ps 或 Pp 为 0 时,称为单极冲击噪声。
椒盐噪声的均值和标准差为:
z
ˉ
=
(
0
)
P
p
+
K
(
1
−
P
s
−
P
p
)
+
(
2
k
−
1
)
P
s
σ
2
=
(
0
−
z
ˉ
)
2
P
p
+
(
K
−
z
ˉ
)
2
(
1
−
P
s
−
P
p
)
+
(
2
k
−
1
)
2
P
s
\\barz = (0)Pp+K(1-Ps-Pp)+(2^k-1)Ps \\\\ \\sigma ^2 = (0-\\barz)^2 Pp+(K-\\barz)^2(1-Ps-Pp)+(2^k-1)^2Ps
zˉ=(0)Pp+K(1−Ps−Pp)+(2k−1)Psσ2=(0−zˉ)2Pp+(K−zˉ)2(1−Ps−Pp)+(2k−1)2Ps
像素被白色盐粒、黑色胡椒粒污染的概率 P 称为噪声密度:
P
=
P
s
+
P
p
P = Ps + Pp
P=Ps+Pp
例如,Ps=0.05,Pp=0.02,则噪声密度 P=0.07,表示图像中约 5% 的像素被盐粒噪声污染,约 2% 的像素被胡椒粒噪声污染,噪声密度为 7%,即图像中 7% 的像素被椒盐噪声污染。
例程 9.6:椒盐噪声 (Salt-pepper Noise)
# # 9.6:椒盐噪声 (Salt-pepper)
img = cv2.imread("../images/Fig0503.tif", 0) # flags=0 读取为灰度图像
ps, pp = 0.05, 0.02
mask = np.random.choice((0, 0.5, 1), size=img.shape[:2], p=[pp, (1-ps-pp), ps])
imgChoiceNoise = img.copy()
imgChoiceNoise[mask==1] = 255
imgChoiceNoise[mask==0] = 0
plt.figure(figsize=(9, 3))
plt.subplot(131), plt.title("Origin"), plt.axis('off')
plt.imshow(img, 'gray', vmin=0, vmax=255)
plt.subplot(132), plt.title("Choice noise"), plt.axis('off')
plt.imshow(imgChoiceNoise, 'gray')
plt.subplot(133), plt.title("Gray hist")
histNP, bins = np.histogram(imgChoiceNoise.flatten(), bins=255, range=[0, 255], density=True)
plt.bar(bins[:-1], histNP[:])
plt.tight_layout()
plt.show()

(本节完)
版权声明:
youcans@xupt 原创作品,转载必须标注原文链接
Copyright 2021 youcans, XUPT
Crated:2022-2-1
欢迎关注 『OpenCV 例程200篇』 系列,持续更新中
欢迎关注 『Python小白的OpenCV学习课』 系列,持续更新中
【OpenCV 例程200篇】01. 图像的读取(cv2.imread)
【OpenCV 例程200篇】02. 图像的保存(cv2.imwrite)
【OpenCV 例程200篇】03. 图像的显示(cv2.imshow)
【OpenCV 例程200篇】04. 用 matplotlib 显示图像(plt.imshow)
【OpenCV 例程200篇】05. 图像的属性(np.shape)
【OpenCV 例程200篇】06. 像素的编辑(img.itemset)
【OpenCV 例程200以上是关于OpenCV 例程200篇92. 指数噪声均匀噪声椒盐噪声的主要内容,如果未能解决你的问题,请参考以下文章