论文笔记:Positive-incentive Noise
Posted UQI-LIUWJ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了论文笔记:Positive-incentive Noise相关的知识,希望对你有一定的参考价值。
2022 TNNLS
- 中心思想是:噪声并不一定是有害的
1 CV问题中的噪声
- 以图像分类为例
-
对图像加入适量的噪声后再训练,识别准确率反而上升了
-

-
- 再以目标检测为例:
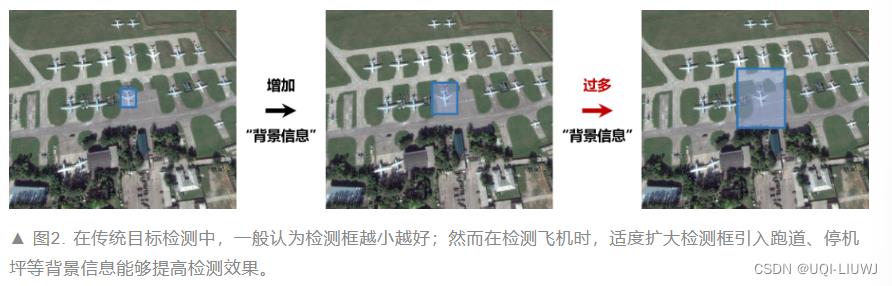
- 从遥感影像中做飞机检测,一般都是把飞机紧紧框住,然后做模型训练。
- 如果把飞机的框适当增大一些,把跑道等干扰信息加进来,模型训练效果反而会更好
- 可能是因为跑道等 “噪声” 和目标之间存在语义相关性,从而对完成飞机检测任务起到了正面的驱动作用,提高了检测准确率。
2 任务熵
- 噪声在获取、数据、特征、样本、决策等诸多层面都存在,根据对完成任务是否存在正向驱动作用,可将噪声划分为 “正激励噪声”(Positive-incentive Noise, Pi/π-Noise)和 “纯噪声”。
- “正激励噪声” 指的是有用的噪声,能对完成任务起到正面的驱动作用。
- “纯噪声” 则是无用、有害的噪声,会妨碍任务的有效执行。
- 为挖掘和利用正激励噪声,论文提出“任务熵”(Task Entropy)H(J)
- 在任务给定的情况下,任务熵的大小衡量了噪声ε与任务J之间 “互信息”(Mutual Information)的多少
- 互信息用来度量两个随机变量的 “共有信息”。
- 任务熵作为一种熵,也可以理解成描述混乱程度,值越大表示越混乱
- 在任务给定的情况下,任务熵的大小衡量了噪声ε与任务J之间 “互信息”(Mutual Information)的多少
- 当互信息大于0的时候,噪声ε是正激励噪声,会正向驱动任务J

- 此时H(J)表示没有噪声时候的任务熵,它比H(J|ε)(有噪声时候的任务熵)大,也就是说,有了噪声之后,反而混乱程度小
参考内容:噪声总是有害吗?西工大李学龙教授提出基于任务熵的数学分析框架 (qq.com)
以上是关于论文笔记:Positive-incentive Noise的主要内容,如果未能解决你的问题,请参考以下文章