ROS从入门到精通系列(二十九)-- linux封装ROS 自启动脚本及可执行程序App
Posted Techblog of HaoWANG
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS从入门到精通系列(二十九)-- linux封装ROS 自启动脚本及可执行程序App相关的知识,希望对你有一定的参考价值。
机器人分布式处理架构
ROS分布式架构,HiBot架构主要使用C/S架构,其中HibotServer为服务器,Muqutte为消息服务器中间件,HiBotClient为运行在机器人上的客户端。主要实现了机器人任务的远程部署、监控、控制三大功能,机器人平台依赖于ROS。其架构如下图所示
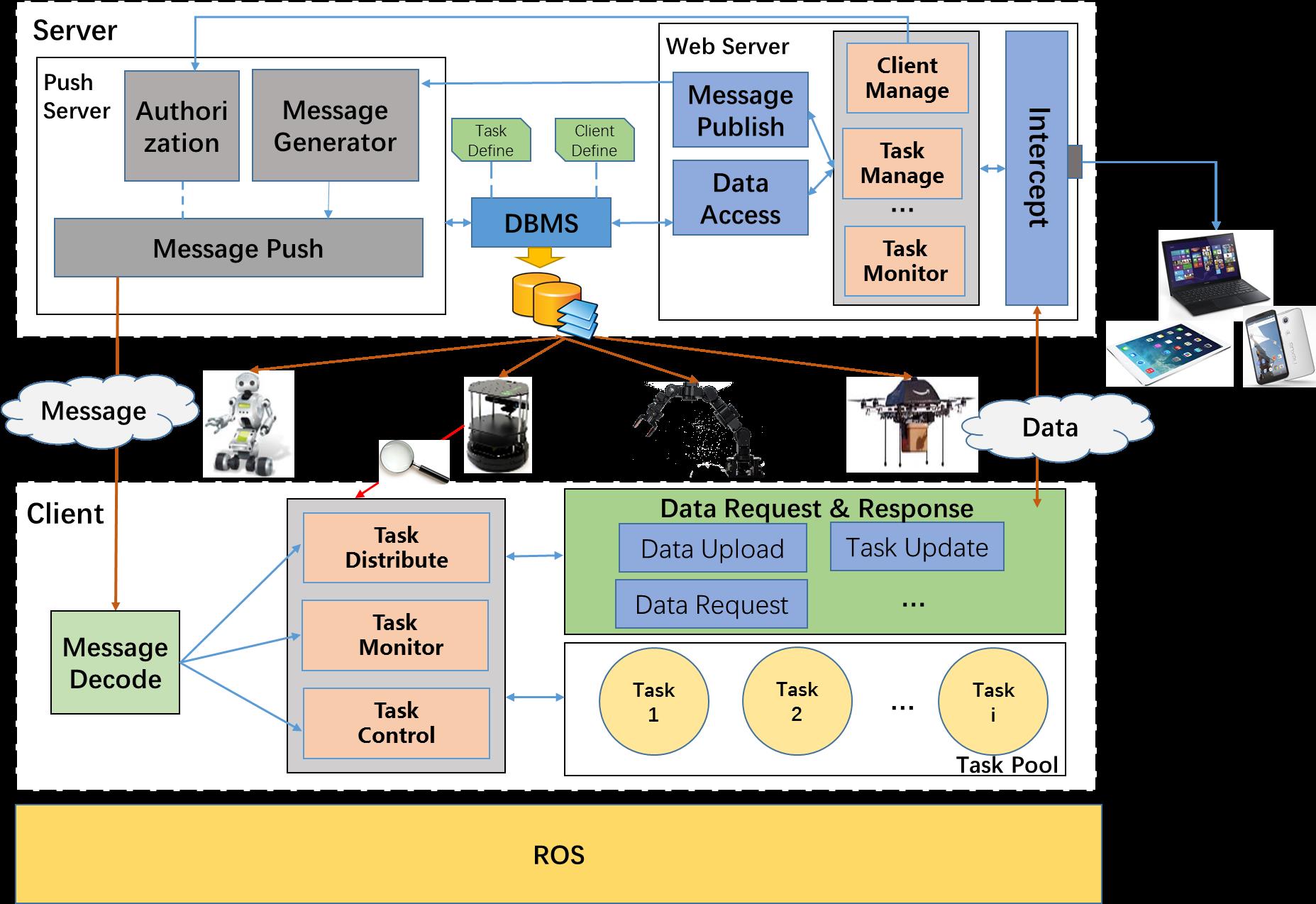
Img Src: https://www.bbsmax.com/A/QV5ZG3AZdy/
以上是关于ROS从入门到精通系列(二十九)-- linux封装ROS 自启动脚本及可执行程序App的主要内容,如果未能解决你的问题,请参考以下文章
ROS从入门到精通系列(十九)ROS Callbacks and Spinning
ROS从入门到精通系列(二十五)--常用ROS工具合集- 2. GazeboRvizMoveit
ROS从入门到精通系列(二十五)--常用ROS工具合集- 2. GazeboRvizMoveit
ROS从入门到精通系列(二十五)--常用ROS工具合集- 2. GazeboRvizMoveit