激光slam学习笔记2--激光点云数据结构特点可视化查看
Posted 鸿_H
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了激光slam学习笔记2--激光点云数据结构特点可视化查看相关的知识,希望对你有一定的参考价值。
背景:不同厂商的激光点云结果存在一定差异,比如有些只有xyz,有些包含其他,如反光率、时间戳、ring等。如何快速判断是个值得学习的点
概要:对于rosbag类型的激光点云,介绍使用rviz快速查看点云结构特点
如何从rviz加载话题可视化在 ros master中的点云话题不做展开介绍
1、操作说明
右击rviz空白处->勾选 Selection (新增一块界面1)-> 左击Select -> 拉选点云 -> 在界面1的点击Point展开项,如图:
禾赛激光128激光雷达点云例子:
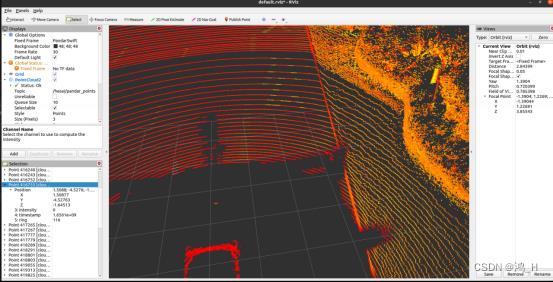
从上图中看出:
禾赛激光雷达的点云信息:
x
y
z
intensity
timestamp
ring
velodye激光点云例子:
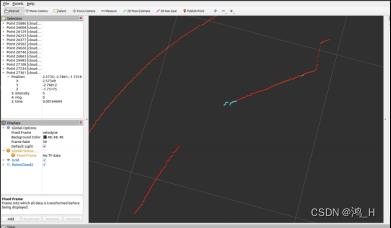
从上图看出:
而对于velodyn点云信息:
x
y
z
intensity
ring
time
2、延伸
上面两个厂商点云结构可以看出,虽然包含的信息一致,但是对应的信息名称不一定一致,所以访问操作时得注意
#####################
不积硅步,无以至千里
好记性不如烂笔头
以上是关于激光slam学习笔记2--激光点云数据结构特点可视化查看的主要内容,如果未能解决你的问题,请参考以下文章