讲座笔记:Representation Learning on Networks
Posted UQI-LIUWJ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了讲座笔记:Representation Learning on Networks相关的知识,希望对你有一定的参考价值。
1 传统机器学习
- 传统机器学习需要进行很多的特征工程
- 我们希望模型自动学习特征,而不是用人为特征工程的方式

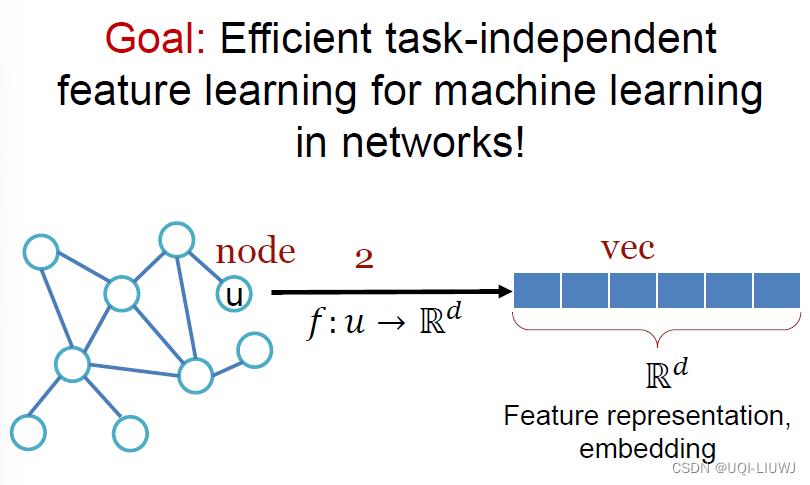
1.1 目标
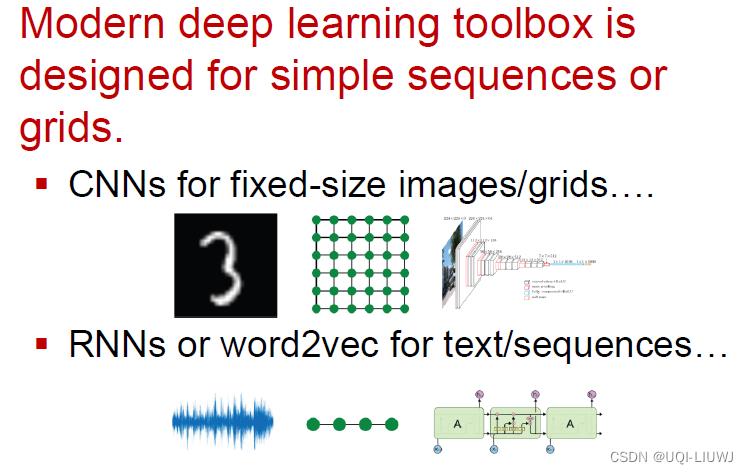
1.2 难点
- graph更复杂,CNN和RNN很难直接应用
- ——>复杂的拓扑结构(不像CNN有网格的概念)
- ——>没有固定的节点的顺序,一般情况下也没有参照点(这会导致同构图问题)
- ——>图经常是动态的
- ——>图经常有多模态的特征
2 Node embedding
2.1 目标
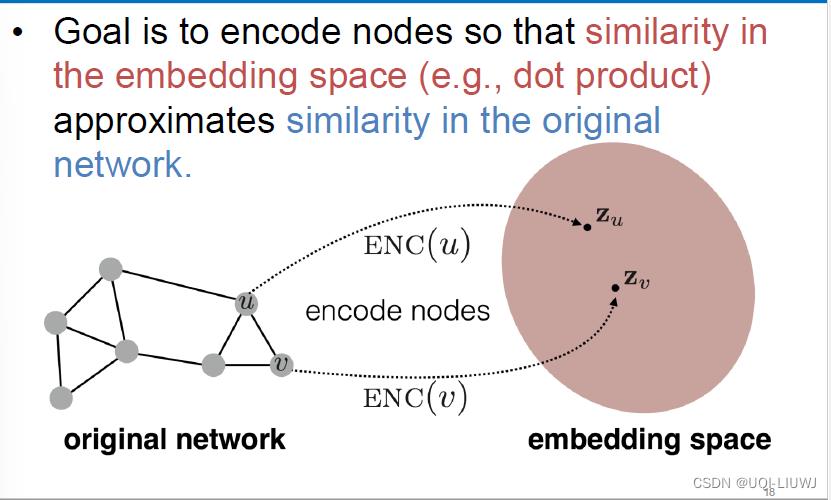
将graph上的点嵌入至d维向量,使得相似的点有相近的embedding

2.2 问题配置
- 图G
- 节点集合V
- 邻接矩阵A(在这里假定是0-1矩阵)
- 不使用其他的信息(比如点特征)
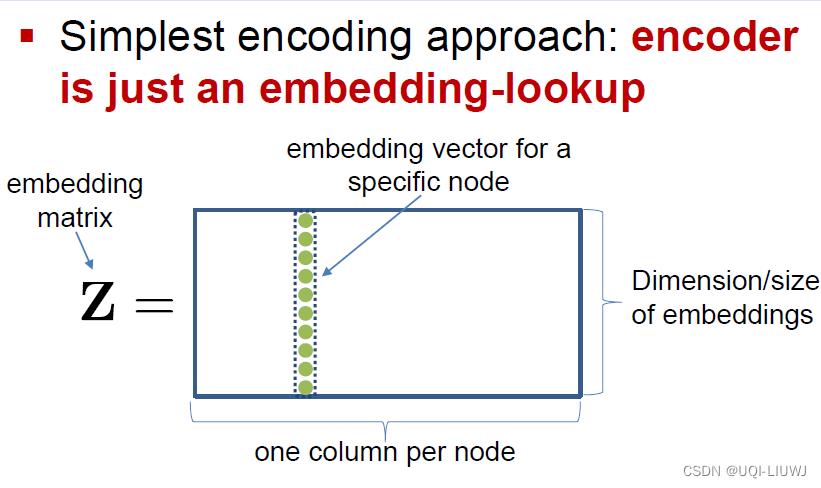
2.3 定义encoder
将点map到embedding上去
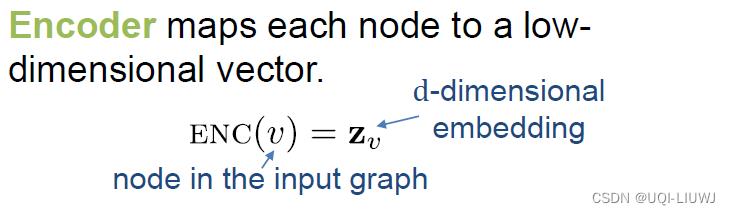
2.3.1 look-up table
一种简单的encoding方式:一张embedding查询表(V是一个one-hot向量)

2.4 定义相似函数
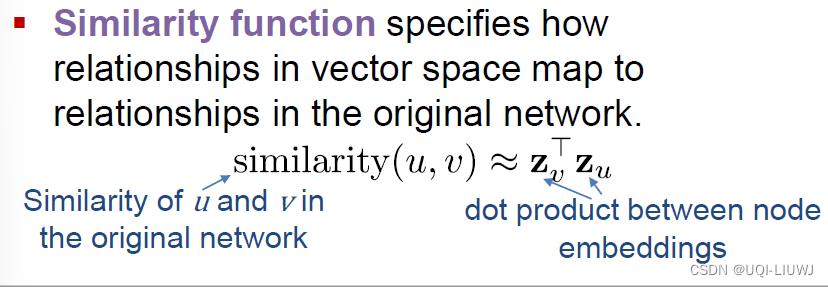
2.4.1 基于邻接的相似度
Ahmed et al. 2013. Distributed Natural Large Scale Graph Factorization .WWW.
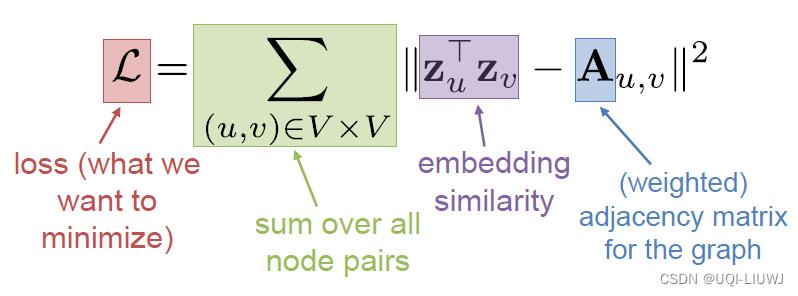
所有点对 的 相似度和邻接性之间的差异
不足之处
 的时间复杂度
的时间复杂度
- 每一对点都需要考虑一次
- 有些算法可以只考虑有连边的点对,此时复杂度可以降至O(|E|)
- O(|V|d)个参数
- 每一个学习的向量(每一个点的向量),都是一个d维向量
- 只考虑直连边

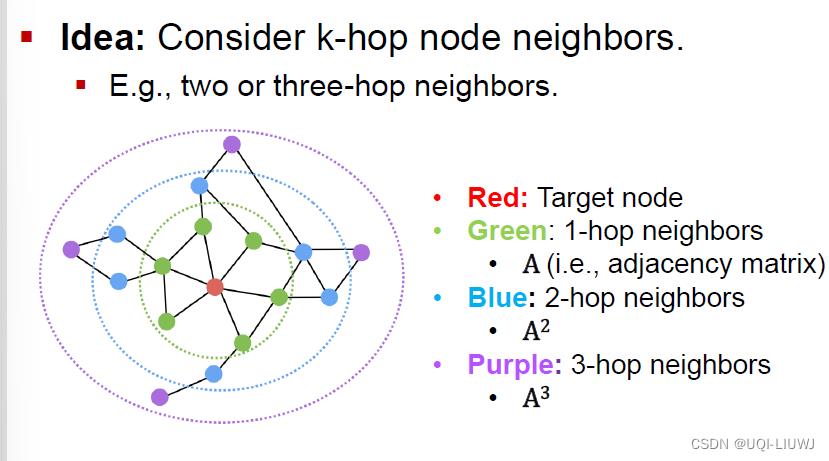
2.4.2 多跳相似度
•Cao et al. 2015. GraRep : Learning Graph Representations with Global Structural Information . CIKM.
•Ou et al. 2016. Asymmetric Transitivity Preserving Graph Embedding .KDD.
k跳邻居,就是邻接矩阵的k次幂

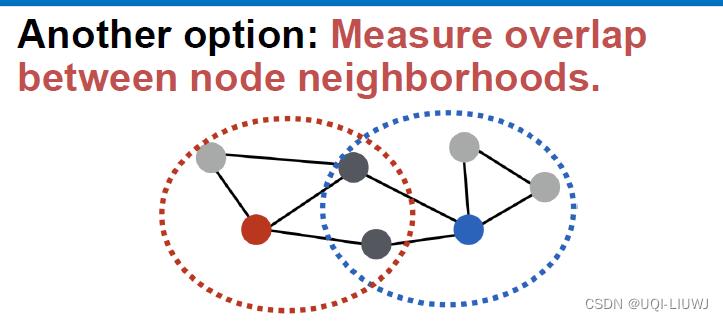
2.4.4 另一种多跳相似度:邻居之间的重合程度
This technique is known as HOPE (Yan et al., 2016).
Asymmetric Transitivity Preserving Graph Embedding
- Jaccard similarity
-
Adamic-Adar score
-

-
这里N(x)表示x的邻居
- 公式表示i,j的共有邻居,每个的邻居数量取log+倒数的和
-

2.4.5 Random Walk
• Perozzi et al. 2014. DeepWalk : Online Learning of Social Representations . KDD.
• Grover et al. 2016. node2vec: Scalable Feature Learning for Networks . KDD


2.4.5.1随机游走的好处
- expressivity:灵活的随机节点相似度定义,这种方法结合了局部和高阶邻域的信息
- efficiency:training的时候,不需要考虑所有的点对,只需要考虑在随机游走上同时出现的点对即可
2.4.5.2 随机游走算法
- 根据某种策略R,从图上的每个点,执行一些随机游走
- 对图上的每个点u,收集相对应的点集

- 是从u点出来的各条随机游走路径上的点集
- 中可能会有重复的元素
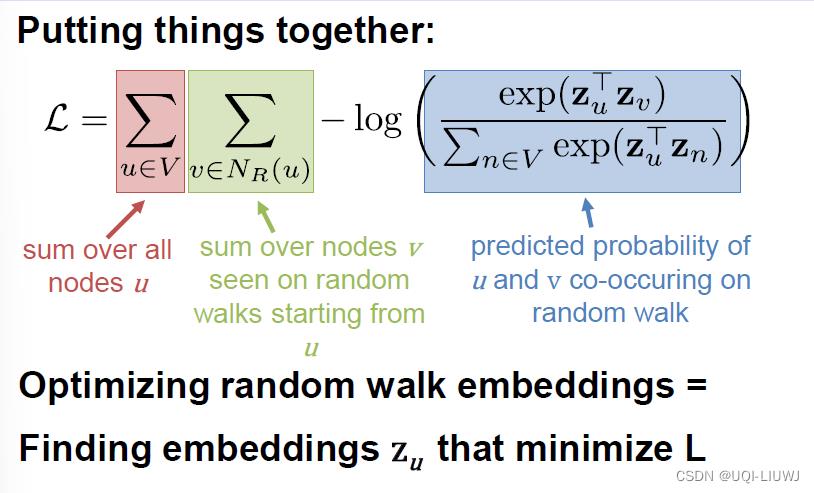
- 根据对数概率,优化embedding


- 目标:最小化损失函数L
- ——>最大化在中的v与u之间的

- ——>最大化在u随机游走路径上的v与u之间的

- ——>在u随机游走路径上的v,尽量地和u相似(
 )
)
- ——>最大化在
2.4.5.3 随机游走算法优化
上述算法有一个问题,就是我计算
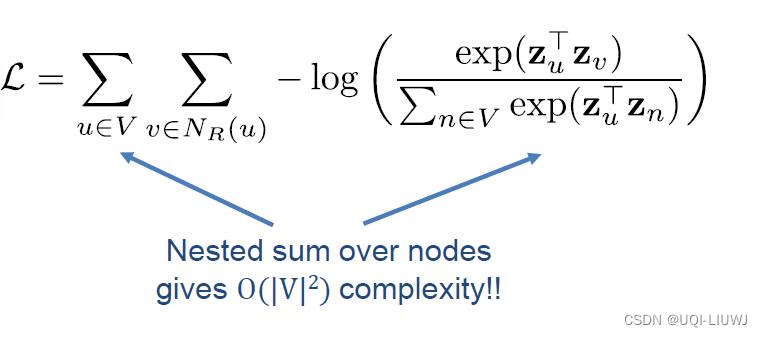
解决方法:负采样
- 分母改为随机采样k个点
- 每个点负采样概率正比于这个点的度数

2.4.5.4 随机游走策略
- 最简单的策略:从每个点跑固定长度,没有bias的随机游走(DeepWalk: Online Learning of Social Representations)
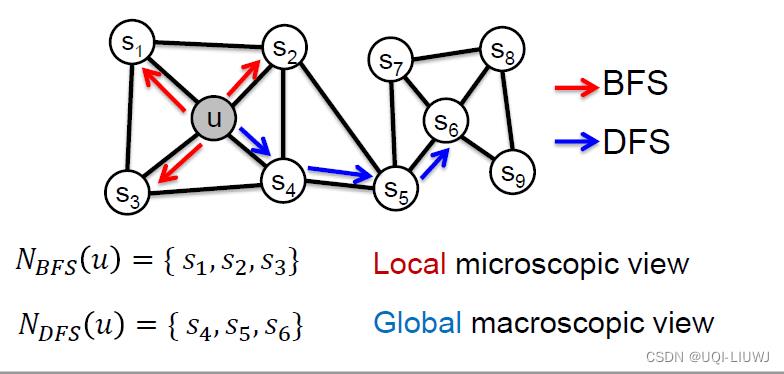
- node2Vec:使用灵活的、有bias的随机游走,在网络的局部和整体视图之间进行权衡。
- 在有bias的随机游走中,需要两个参数
- return parameter p
- walk away parameter q
- 他们的作用如下:
从w到s1——>相对于起始点u来说,距离变小了——>离u更近,所以是return
从w到s2——> 相对于起始点u来说,距离不变
从w到s3——>相对于其实点u来说,距离变大了——>离u更远,所以是walk away
- 所以如果需要BFS类型的随机游走(围绕在起始点u周围一圈的),那么p值就要小,1/p相应地大,从w到s1的概率就大
- 如果需要DFS类型的随机游走(从u向远处拓展),那么q值就要小,1/q相应地大,从w到s3的概率就大


- 其他的一些随机游走

2.5 总结
- 没有一种方法在所有情况下都是最优的
-
Graph Embedding Techniques, Applications, and Performance: A Survey中提到:
-
node2vec在点分类任务中效果更好;
-
multi-hop在边预测任务中效果更好
-
-
随机游走效率上相对好一些(O(|E|) VS
-
3 GNN
3.1 配置
- 图G
- 节点集V
- 邻接矩阵A(0-1矩阵)
- 点特征矩阵

3.2 Neighborhood Aggregation
核心思想是使用类似于神经网络之类的模型将邻居的embedding信息加总到 目标点上

- 不同neighborhood aggregation的区别在于,如何对邻居信息进行整合?
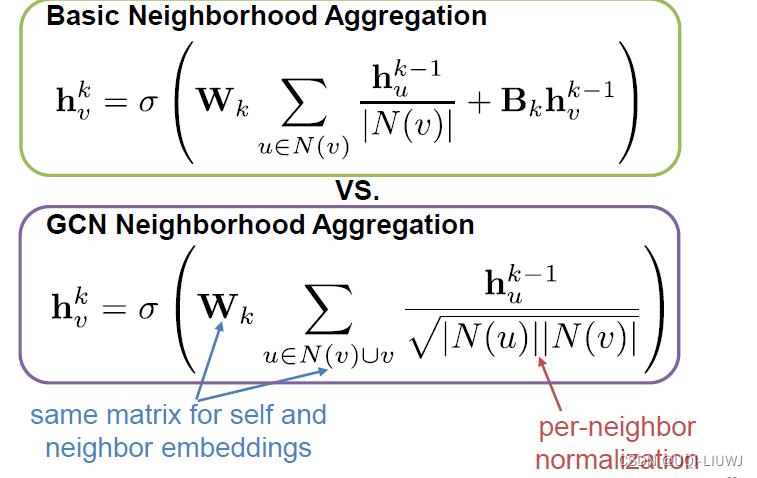
3.2.1 最基本方法:邻居的均值
最基本的方法是:对邻居的信息求平均,然后使用一个神经网络
这里Wk和Bk都是可训练的参数


3.2.1.1 好处
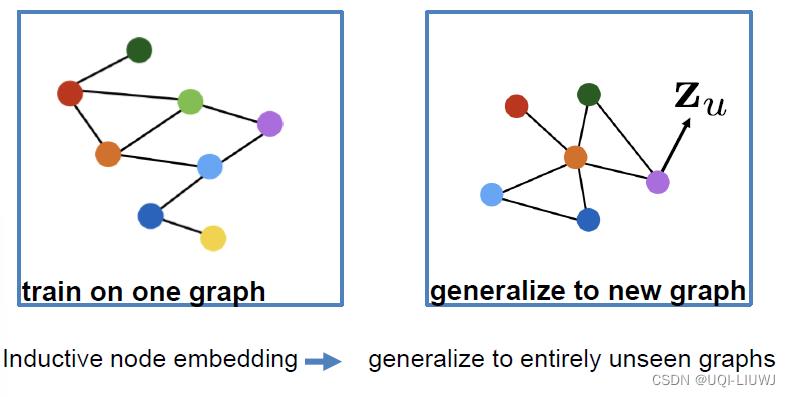
这样设计模型的一个好处是,模型的参数Wk和Bk对所有的点都是共享的
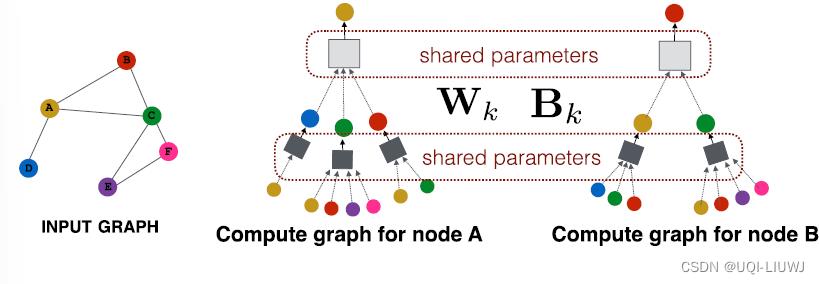
另一个好处是,训练好的模型可以延申到新的graph中去
3.3 GCN
Semi-Supervised Classification with Graph Convolutional Networks
3.3.1 neighborhood aggregation
不是简简单单的平均,这里通过点的度数进行normalization
以上是关于讲座笔记:Representation Learning on Networks的主要内容,如果未能解决你的问题,请参考以下文章