汽车悬架的半主动控制系统MATLAB/SIMULNK仿真
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了汽车悬架的半主动控制系统MATLAB/SIMULNK仿真相关的知识,希望对你有一定的参考价值。
1、内容简介
略
631-可以交流、咨询、答疑
2、内容说明
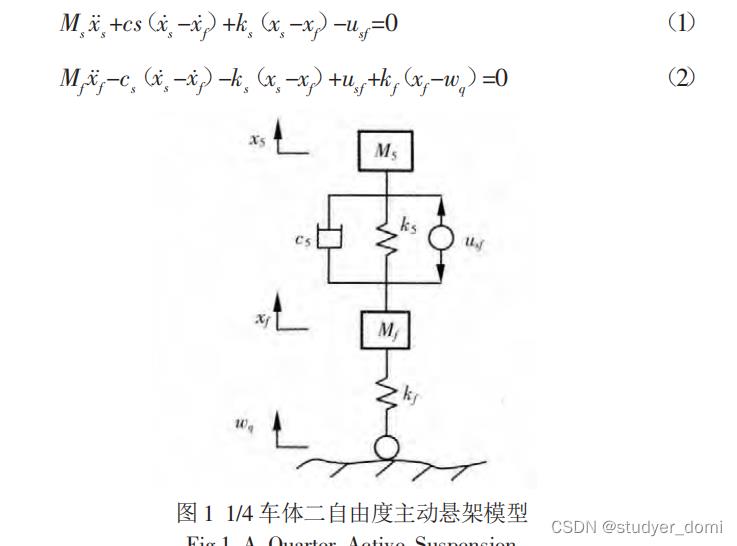
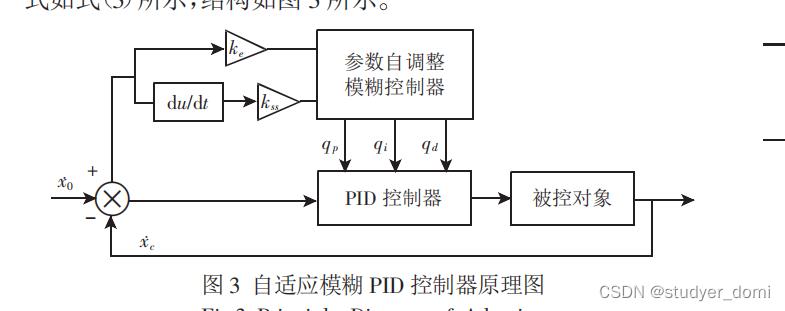
要:为改善汽车行驶平顺性,建立了简化的 1/4 车二自由度汽车主动悬架模型,提出了主动悬架自适应模糊 PID 控 制方法。该方法中 PID 控制器以车身垂直速度的误差为控制参量,将车身垂直速度误差及误差变化率作为模糊控制器的 输入变量,对 PID 控制器参数进行在线自调整。以 C 级路面白噪声随机信号为输入,利用 MATLAB/Simulink 对自适应模 糊 PID 控制器进行了仿真,结果表明:自适应模糊 PID 在车身垂直速度、加速度及轮胎动载荷等控制方面明显优于被动 悬架及传统 PID 控制,说明该法具有较好的控制效果和鲁棒性。
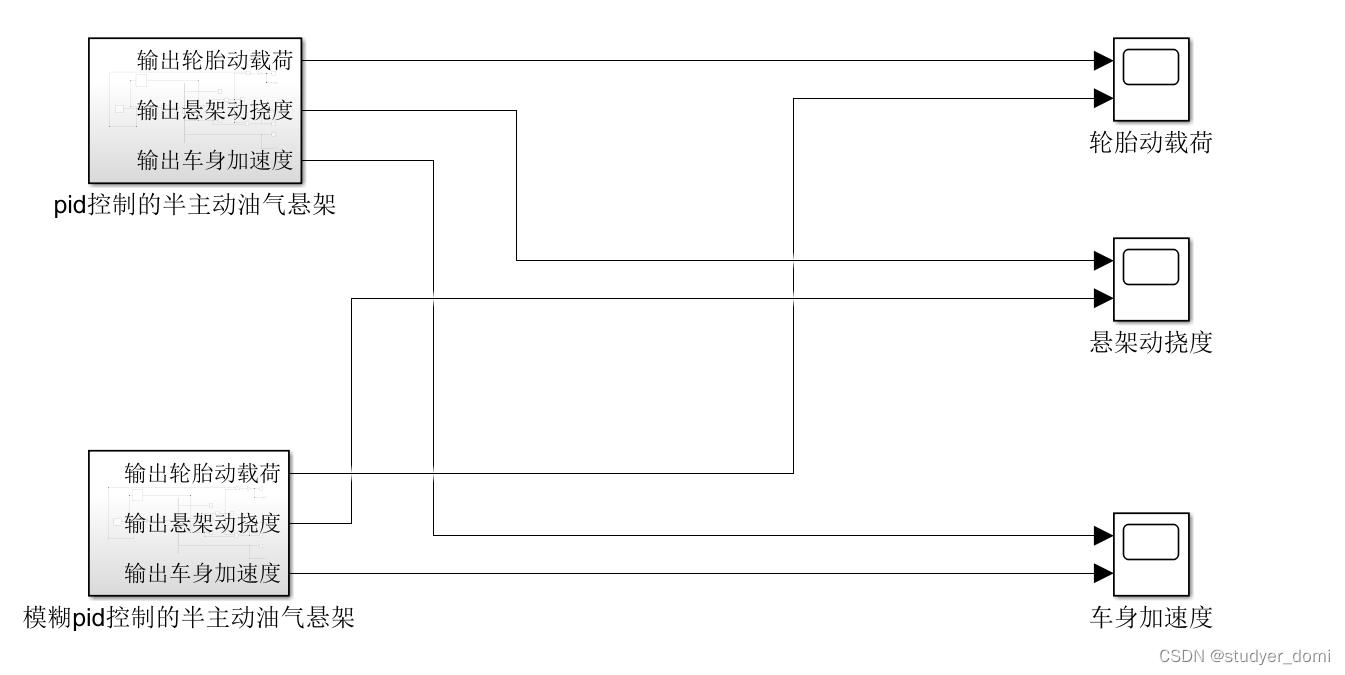
汽车悬架系统的作用是将路面作用于车轮上的力或力矩传 递给车架,衰减由于路面冲击载荷引起的振动,满足汽车行驶平 顺性和操纵稳定性的要求。然而目前汽车上普遍采用被动悬架系 统,其控制参数不可调节,因而难以满足汽车工况的复杂变化,限 制了汽车性能的大大改善。主动悬架系统能实时地调整和产生主 动控制力,结合行驶工况的变化,抑制簧载质量的位移和加速度, 使得悬架始终处于最优减振状态,改善车辆行驶平顺性。所以,研 究性能优良的主动悬架系统将是未来汽车悬架发展的主要方向。 国内外关于车辆主动悬架控制进行了大量研究[1-5],主要是 将现代控制理论与汽车系统动力学相结合,提出了随机最优控制 理论、PID 控制、模糊控制、变结构理论、天棚阻尼控制理论及自适 应控制理论等并将其理论应用于车辆悬架系统的主被动控制当中, 取得了一定的研究成果。众所周知,车辆系统是一个具有非线性、随 机性与不确定性的复杂控制系统,用精确的数学模型难以得到令人 满意的效果[6-7]。模糊控制理论能够模仿人脑逻辑推理和决策过程, 可较好地处理语言信息和数据信息,适合于解决具有模糊性、复 杂性和不确定性因素的控制系统。因此,模糊控制、神经网络、遗 传算法等智能控制方法日显其优越性而被广泛应用[8-11]。鉴于此, 采用模糊控制技术,结合 PID 控制理论,建立简化 1/4 车二自由 度主动悬架模型,设计了主动悬架自适应模糊 PID 控制器。利用 MATLAB/Simulink 构建了仿真模块实现模型的仿真。统计了反映 悬架性能优劣的主要指标:车身垂直加速度、悬架动挠度、车轮动载 荷的变化,并与被动悬架及传统 PID 控制效果进行了比较分析。
3、仿真分析
略
K=17000;
Kt=170000;
C=1300;
m1=45;
m2=330;
A=[0 1 0 0;-K/m2 -C/m2 K/m2 C/m2;0 0 0 1;K/m1 C/m1 -(K+Kt)/m1 -C/m1];
B=[0 0;-1/m2 0;0 0;1/m1 Kt/m1];
B1=[0;0;Kt/m1;0];
C=[0 1 0 0;0 0 0 1;1 0 0 0;-K/m2 -C/m2 K/m2 C/m2];
D=[0 0;0 0;0 0;-1/m2 0];
4、参考论文
汽车主动悬架自适应模糊PID控制研究_陈学文 (1).pdf
以上是关于汽车悬架的半主动控制系统MATLAB/SIMULNK仿真的主要内容,如果未能解决你的问题,请参考以下文章