轨迹跟踪基于matlab拓展卡尔曼滤波时序四旋翼无人机状态跟踪含Matlab源码 2246期
Posted 海神之光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了轨迹跟踪基于matlab拓展卡尔曼滤波时序四旋翼无人机状态跟踪含Matlab源码 2246期相关的知识,希望对你有一定的参考价值。
⛄一、拓展卡尔曼滤波时序四旋翼无人机状态跟踪
卡尔曼滤波算法为获得最优估计和最小误差方差,将从目标模型中得到的测量值一步步递推,实时获取新时刻的状态估计值。
假设目标状态方程和观测方程分别为:

其中,k为离散时间,X(k)为系统在k时刻的状态,Y(k)为观测信号,W(k)为过程噪声,V(k)为观测噪声,A是状态转移矩阵,B是噪声驱动矩阵,H是观测矩阵。假设W(k)和V(k)是均值为零,方差各为Q和R的不相关白噪声。
目标在k时刻的估计值,即卡尔曼滤波算法的数学表达式[12]如下:
状态一步预测为:

协方差一步预测为:

卡尔曼滤波增益为:

状态更新为:

状态协方差更新为:

以上数学表达式表明,通过目标上一时刻的状态估计值预测出当前时刻的状态估计值,再得到当前时刻的更新值。卡尔曼滤波算法流程图如图1所示:
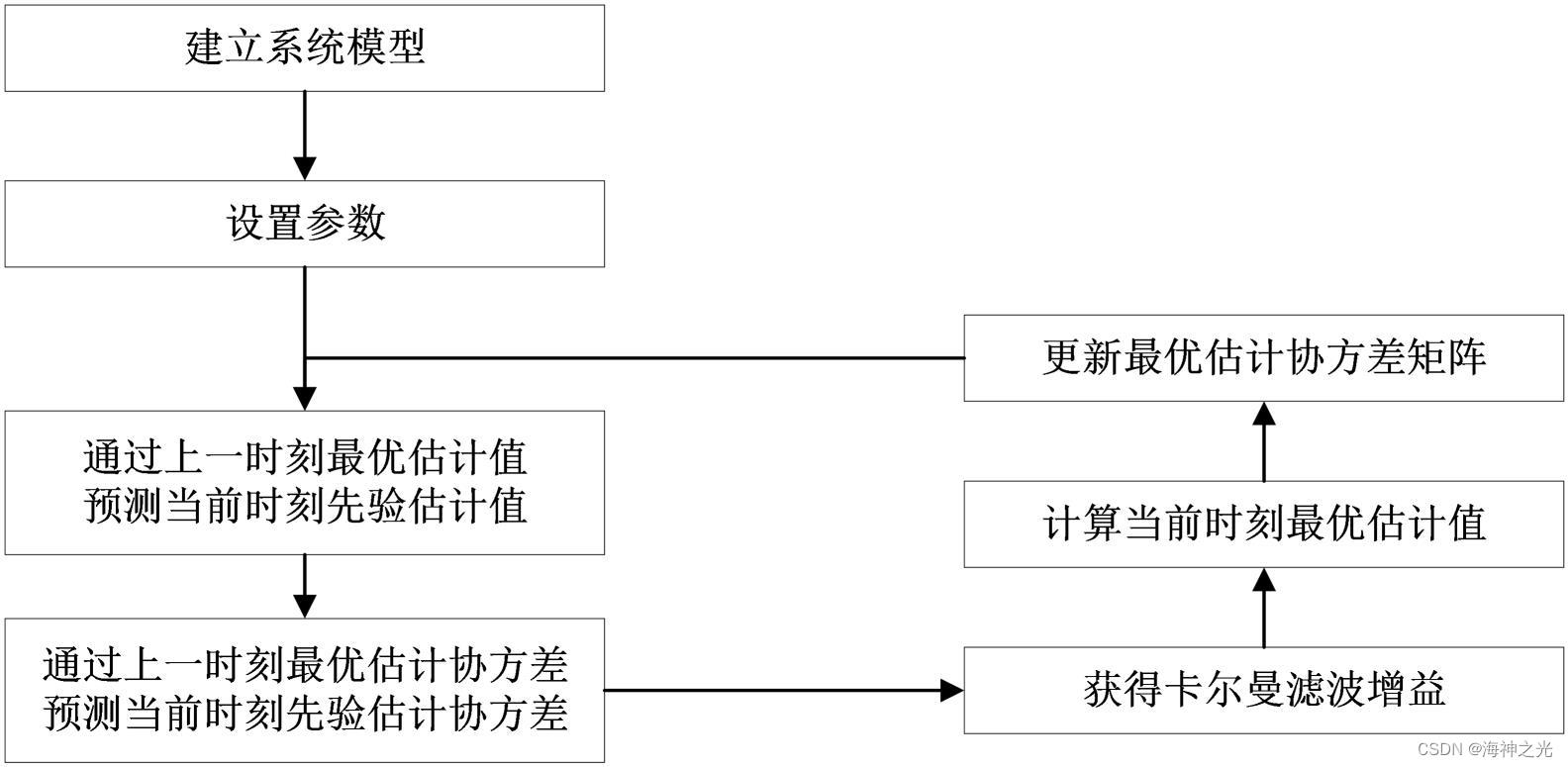
图1 卡尔曼滤波算法流程图
卡尔曼滤波算法在目标的轨迹跟踪中具有很好的性能,而且还有很强的适应能力,能够对状态值等进行实时处理,这些优势在后续的仿真中得以应用。
⛄二、部分源代码
clear all;
close all
N=200;
bsx(1)=1;
p(1)=10;
Z=randn(1,N)+25;
R = std(Z).^2;
w=randn(1,N);
Q = std(w).^2;
for t=2:N;
x(t)=bsx(t-1);
p1(t)=p(t-1)+Q;
kg(t)=p1(t)/(p1(t)+R);
bsx(t)=x(t)+kg(t)*(Z(t)-x(t));
p(t)=(1-kg(t))*p1(t);
end
t=1:N;
plot(t,bsx,‘r’, t,Z,‘g’, t,x,‘b’); % 红色线最优化估算结果滤波后的值,%绿色线观测值,蓝色线预测值
legend(‘Kalman滤波结果’,‘观测值’,‘预测值’);
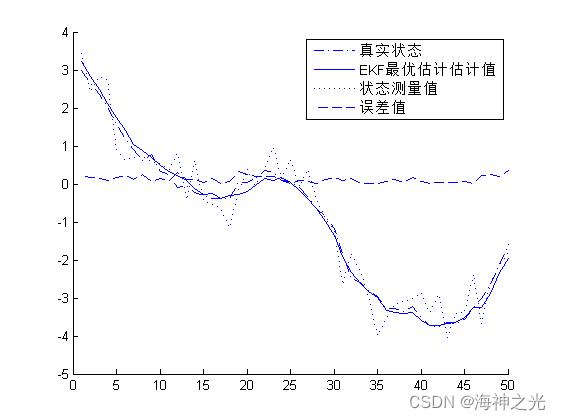
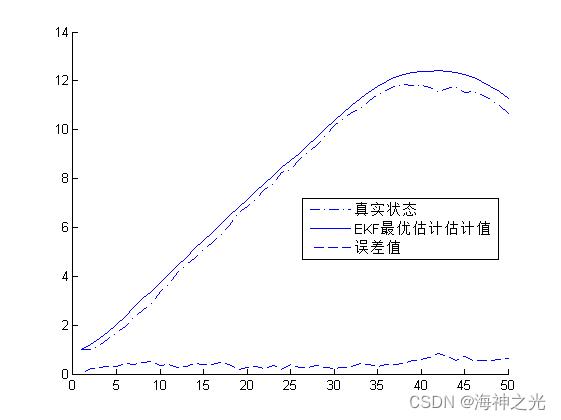
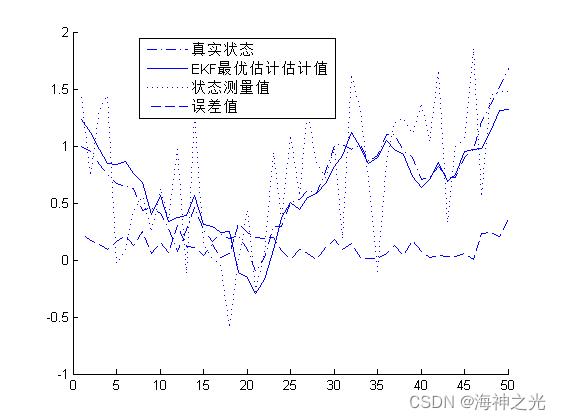
⛄三、运行结果

⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]许奕,邢传玺,万志良,姜佳圆.基于卡尔曼滤波算法的多AUV定位技术研究[J].云南民族大学学报(自然科学版).
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
以上是关于轨迹跟踪基于matlab拓展卡尔曼滤波时序四旋翼无人机状态跟踪含Matlab源码 2246期的主要内容,如果未能解决你的问题,请参考以下文章