Paper Reading 2:Human-level control through deep reinforcement learning
Posted songrotek
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Paper Reading 2:Human-level control through deep reinforcement learning相关的知识,希望对你有一定的参考价值。
来源:Nature 2015
作者:Deepmind
理解基础:
- 深度学习基础
- 增强学习基础
创新点:构建一个全新的Agent,基于Deep Q-network,能够直接从高维的原始输入数据中通过End-to-End的增强学习训练来学习策略
成果:将算法应用到Atari 2600 游戏中,其中49个游戏水平超过人类。第一个连接了高维的感知输入到动作,能够通用地学习多种不同的task
详细分析
研究目标
General Aritficial Intelligence 通用人工智能!这绝对是人工智能当前最振奋人心的问题!创造一个单一的算法能够学习掌握执行多种任务。从而全面解放人类的重复性劳动。
Deep Q-network是本文提出的核心算法。
核心思想
使用深度卷积神经网络(deep convolutional neural network)来拟合最优的动作估值函数(optimal action-value function).
面临的困难
增强学习的困难在于在使用nonlinear function approximator非线性函数拟合时很容易不稳定unstable甚至发散diverge。
不稳定有很多原因,主要是数据的相关性太强导致小的权值更新会导致policy策略大的变化。
解决办法
- experience replay
- fixed θ 目标Q值仅周期性更新,目的是减少目标和q值的相关性。第二个办法在NIPS 2013的文章中没有
算法基本流程
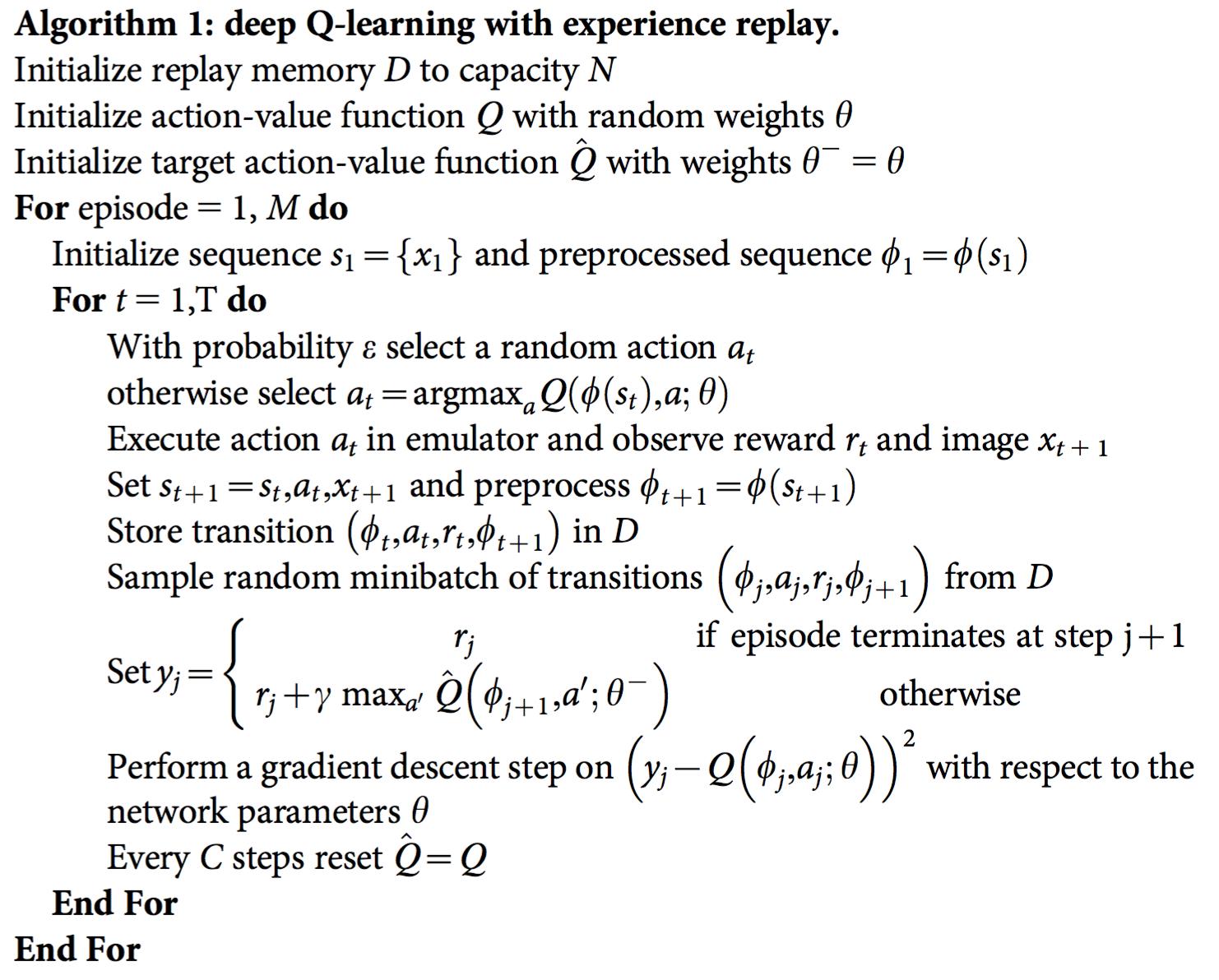
1)初始化replay memory D,容量是N 用于存储 训练的样本
2)初始化action-value function 的Q 卷积神经网络 ,初始的参数
θ
随机
3)初始化 target action-value function的卷积神经网络,结构和Q的一样,参数
θ∗−
初始等于Q的参数
For episode = 1,M do
初始化状态系列s1,并对其进行预处理得到4 * 84 * 84的视频帧
for t=1,T do // 每个episode篇章训练一定的时间
根据概率e(很小)选择一个随机的动作
或者根据当前的状态输入到当前的网络中 (用了一次CNN)计算出每个动作的Q值,选择Q值最大的一个动作(最优动作)
执行上面的动作a就可以得到reward(得分)以及下一个图像
那么下一个状态就往前移动一帧,依然是4帧的图像,再次处理得到新的网络输入
存储(上一个状态,使用的动作,得到reward,下一个状态)数据 到replay memory来做训练
接下来从D中随机选取一个存储的数据来训练网络
计算当前状态的目标action-value,根据bellman公式得到:
如果episode结束,那么就是得到的reward,如果没有结束,那么就将下一个处理好的状态输入到网络,使用target网络 参数(上面的3)),得到最大的Q值,然后按下面公式计算: (用第二次CNN)
接下来就是计算当前状态和动作下的Q值,将当前处理好的状态输入到网络,选择对应的动作的Q值。(用第三次CNN)
根据loss function通过SGD来更新参数
每C次迭代后更新target action-value 网络的参数为当前的参数
end
end
具体Atari 2600 实验成果
比NIPS2013的版本改进不少,主要是Fixed target Q-network的贡献
DQN的突出表现
使用t-SNE算法来可视化高维数据,相似的state会放在接近的位置。有时候可能state不相似,但期望的reward相近。结论是
- 这个网络能够从高维的原始输入中学习支持可适应规则的表征。
疑问点: The representations learned by DQN are able to generalize to data generated from policies other than its own
- 能够发现相对长的策略,虽然依然无法应对很长策略的游戏
和脑科学对比
Reward signals during perceptual learning may influence the characteristics of representations within primate visual cortex.
The hippocampus may support the physical realization of such a process in the mammalian brain,with time-compressed reactivation of recently experienced trajectories during offline periods
未来使用优先的经验进行训练必然会改进性能!
小结
Nature的文章结构和NIPS这种会议的文章结构是完全不一样的。Nature更重要的是告诉不了解的人们他们取得的成果,而具体的技术实现则全部放在附录。
Method 技术方法再分析
这里只分析和NIPS2013不一样的地方
Preprocess预处理
Nature版本:使用Y通道图像(luminance亮度分量)
NIPS版本:使用灰度图像
Model Architecture 模型结构
和NIPS一样
Training 训练
比NIPS多训练了其他游戏。
使用RMSProp 更新参数(看来有必要再次学习一下Hinton的课程了)
Procedure Evaluation 过程评估
只是介绍训练完之后如何评估训练效果,比如每个游戏玩30次至多5分钟。
Algorithm 算法
这里等同于NIPS的背景介绍
总结
总的来说Nature文章对DQN进行了改进,添加了Fixed Target Q-network,提升了性能,并且对更多的游戏做了效果评估,以及进一步发现了DQN算法的优点及类人特性。
以上是关于Paper Reading 2:Human-level control through deep reinforcement learning的主要内容,如果未能解决你的问题,请参考以下文章