使用Python,Open3D对点云散点投影到面上并可视化,使用3种方法计算面的法向量及与平均法向量的夹角
Posted 程序媛一枚~
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了使用Python,Open3D对点云散点投影到面上并可视化,使用3种方法计算面的法向量及与平均法向量的夹角相关的知识,希望对你有一定的参考价值。
使用Python,Open3D对点云散点投影到面上并可视化,使用3种方法计算面的法向量及与平均法向量的夹角
写这篇博客源于博友的提问,他坚定了我继续坚持学习的心,带给了我充实与快乐。
将介绍以下5部分:
- 随机生成点云点
- 投影点到面(给出了6个面的中心点,离哪个中心点距离近就投影到哪个面)
- 对投影到每个面的点云计算法向量点(3种方法 KNN 半径近邻 混合近邻)
- 对每个面上的法向量及与平均法向量的夹角
- 可视化原始点及法向量点
1. 效果图
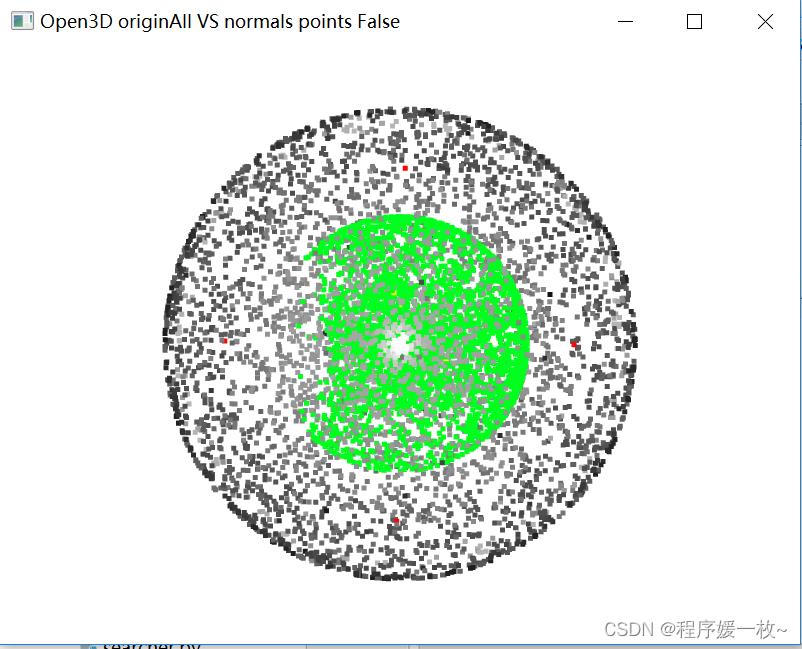
1.1 点云点灰色 VS 法向量点绿色 VS 法向量可视化
全量点云点灰色 VS 全量法向量点绿色效果图如下:
投影到每个面的均值点为渲染为红色比较明显。法向量点均值点渲染为黄色这里不太明显,可查看下边每个投影面的效果图;
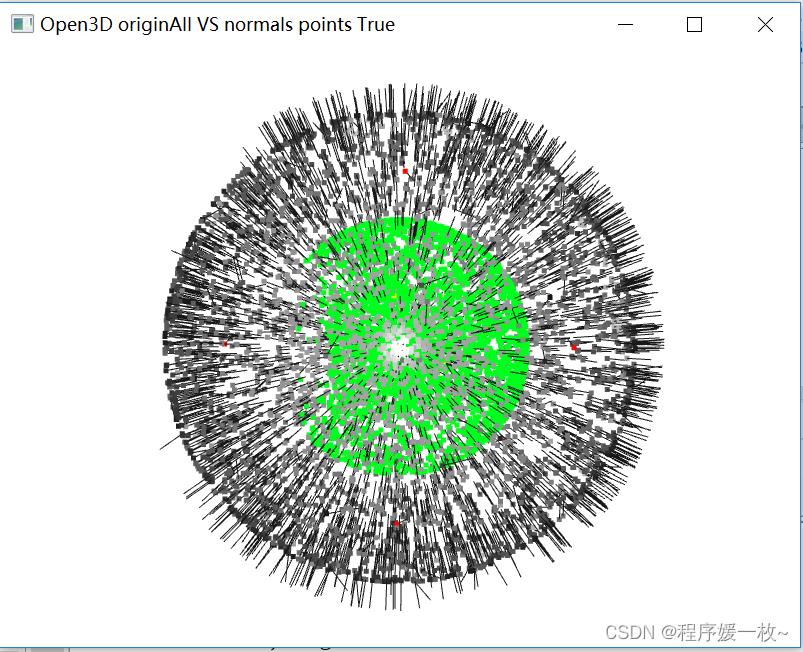
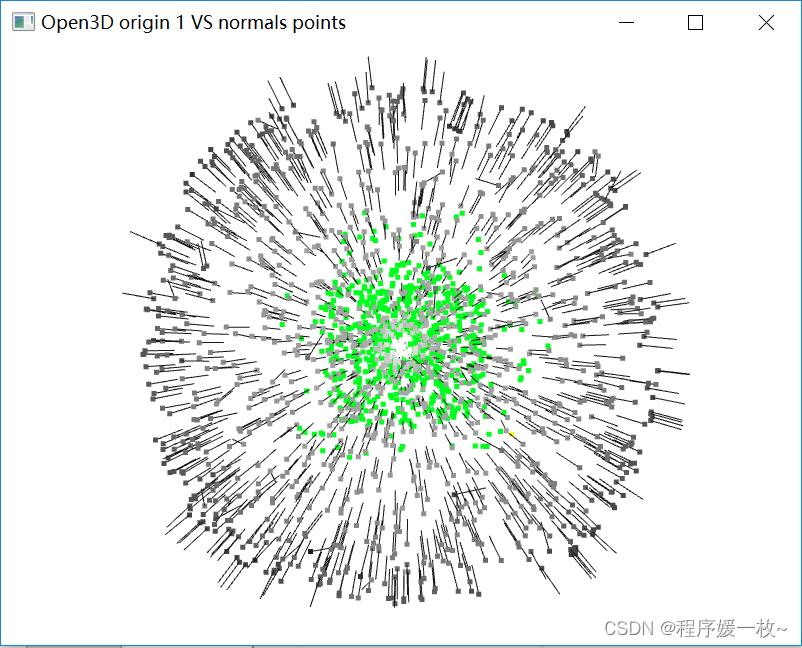
全量点云点灰色 VS 全量法向量点绿色 VS 法向量可视化 效果图如下:
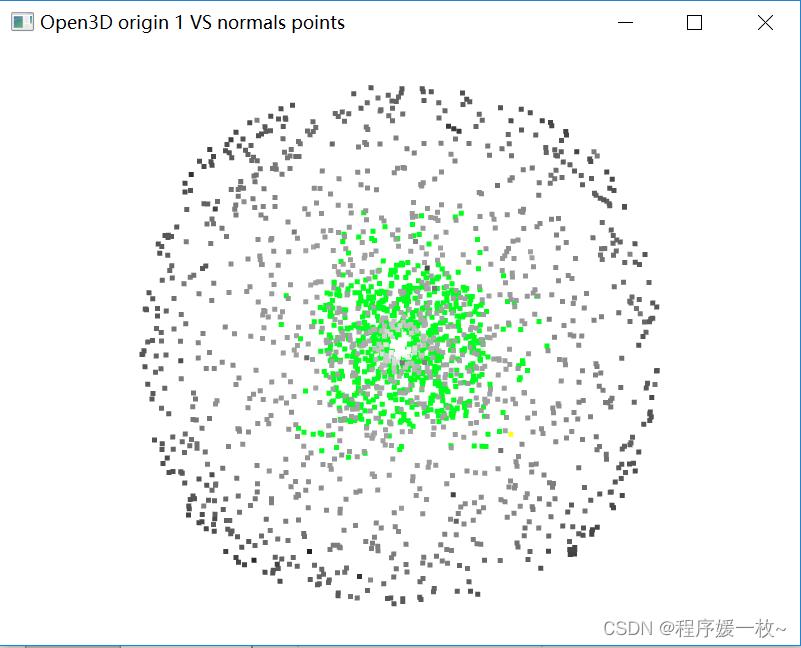
1.2 投影到每个面上的点云点灰色 VS 法向量点绿色 VS 均值点红色,法向量均值点黄色
投影到第一个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,如下图
红色,黄色点不明显,旋转下看下一个图;
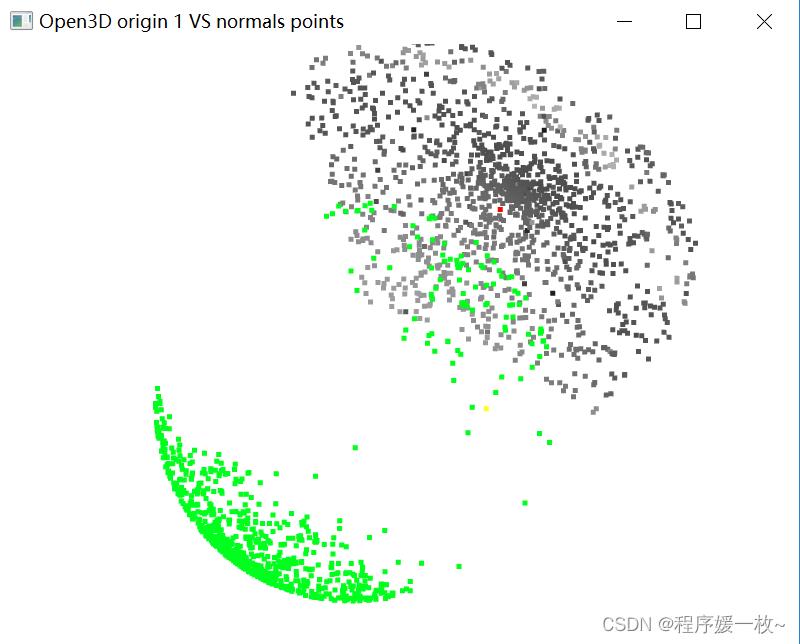
投影到第一个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,旋转后红色、黄色点比较明显 如下图
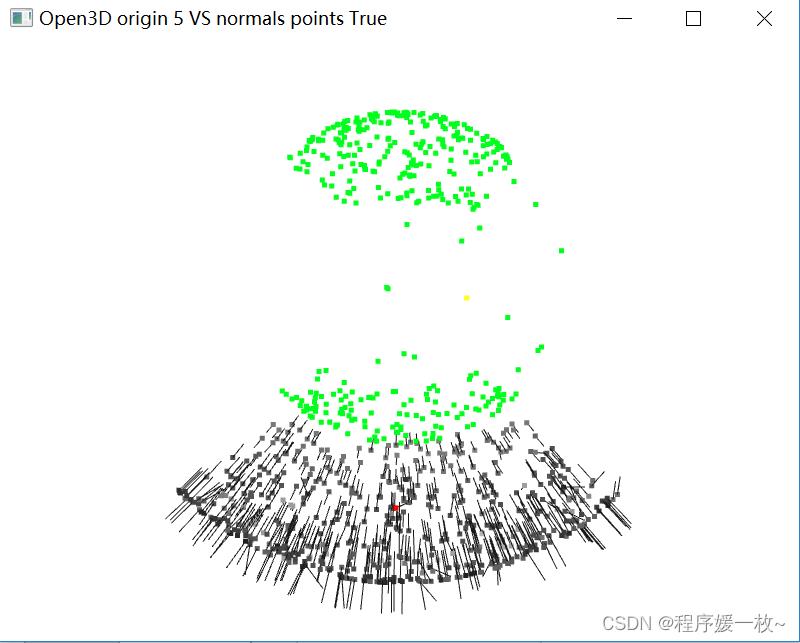
 投影到第一个面上的原始点渲染为灰色,均值点渲染为红色;
投影到第一个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,同时可视化法向量点 如下图
投影到第2个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,如下图
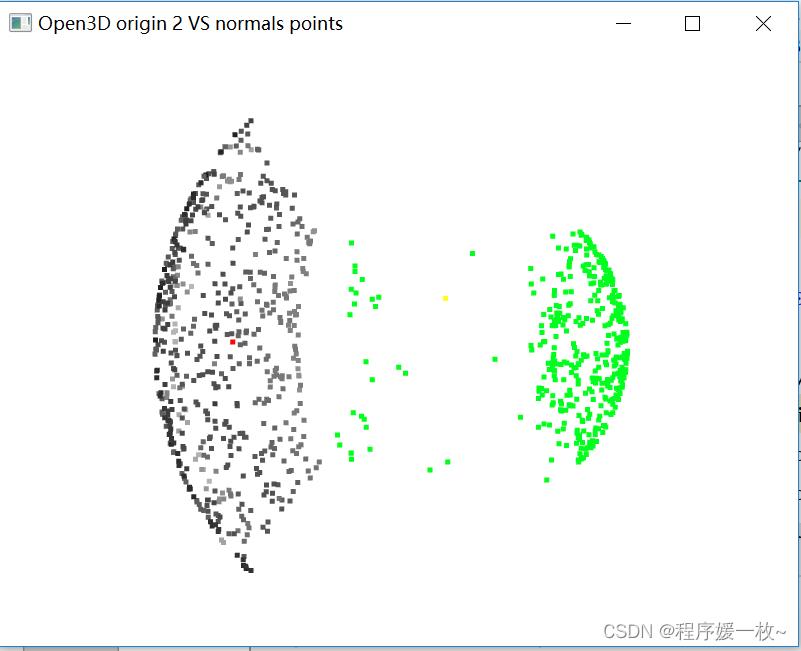
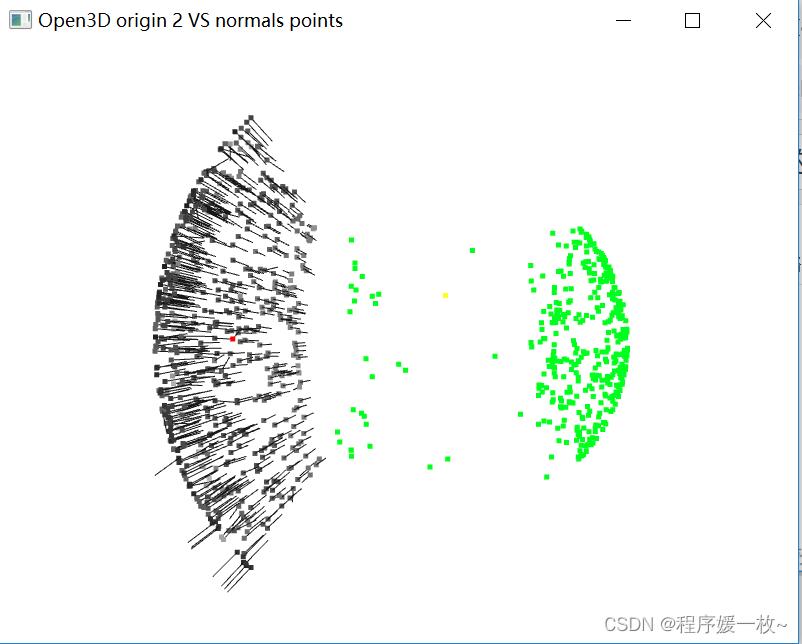
投影到第2个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,同时渲染法向量 如下图
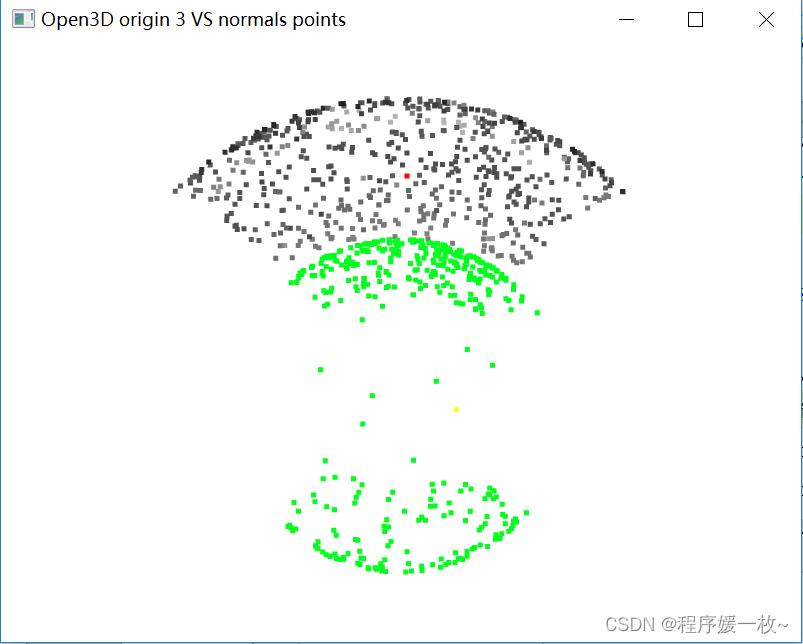
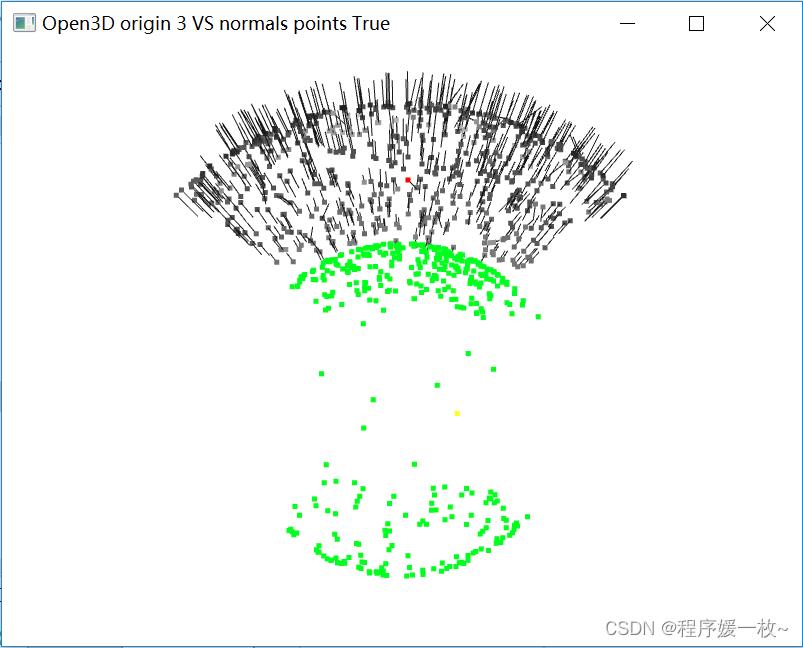
投影到第3个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,如下图
投影到第3个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,同时渲染法向量 如下图
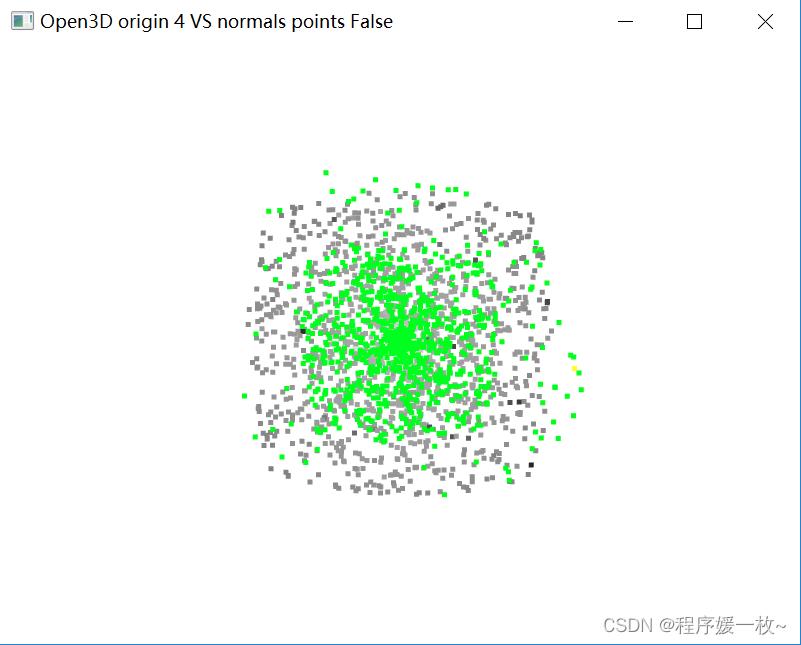
投影到第4个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,如下图
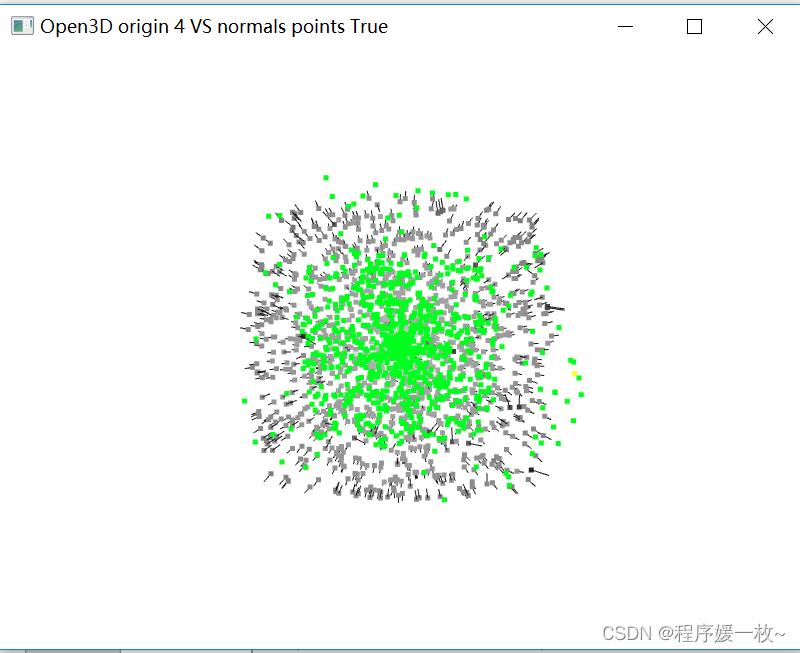
投影到第4个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,同时渲染法向量 如下图
投影到第5个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,如下图
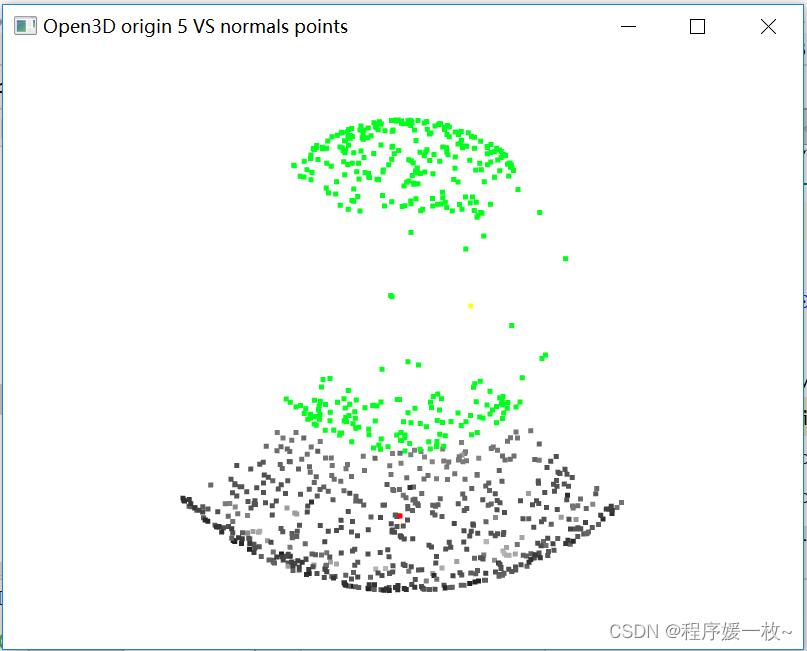
投影到第5个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,同时渲染法向量 如下图
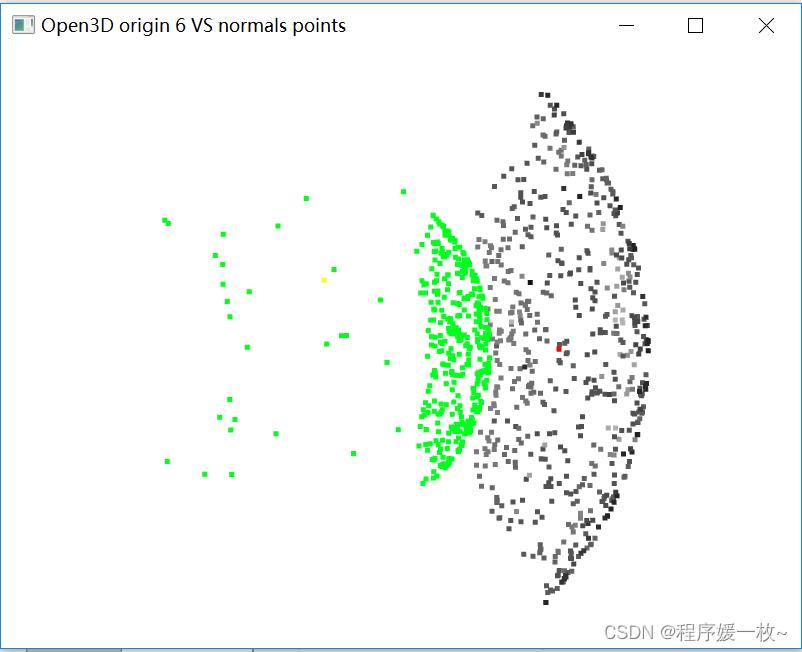
投影到第6个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,如下图
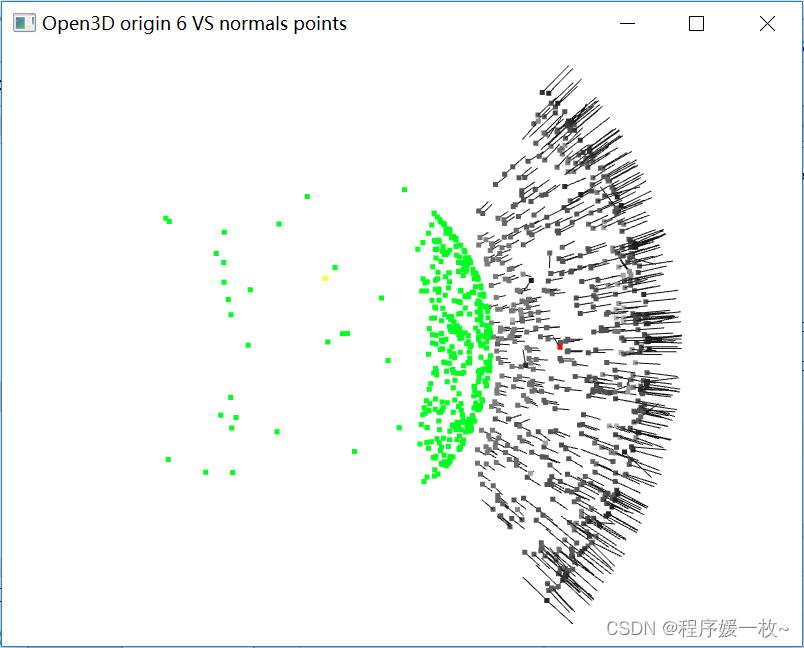
投影到第6个面上的原始点渲染为灰色,均值点渲染为红色;
法向量点渲染为绿色,法向量均值点渲染为黄色,同时渲染法向量 如下图
2. 源码
# 随机生成点
# 投影到面上,(给出了6个面的中心点,离哪个中心点距离近就投影到哪个面)
# 对投影到每个面的点云计算法向量点(3种方法 KNN 半径近邻 混合近邻)
# 对每个面上的法向量求均值及与平均法向量的夹角
# 并可视化原始点灰色,法向量点绿色,均值点红色,均值法向量点黄色
import random
import numpy as np
import open3d as o3d
# 随机种子,以便复现结果
random.seed(123)
# 假设立方体是2*2*2,立方体的质心是笛卡尔坐标的原点,立方体外接球的半径为sqrt(3)
d = # 存储面的中心点及投影到每个面上的点云点,key中心 values投影到该面的点云点
def add_dict(dictionary, loc, centroid):
# loc is the point's location on sphere,
# centroid is the center(s) of cube's face(s) that is nearest to the loc
if tuple(loc) in dictionary.keys():
dictionary[tuple(loc)].append(list(centroid))
else:
dictionary[tuple(loc)] = [list(centroid)]
def point_generator(npoints, r):
result = []
# 0 < theta < 2*np.pi
# 0 < phi < np.pi
for i in range(npoints):
theta = random.random() * 2 * np.pi
phi = random.random() * np.pi
x = r * np.cos(theta) * np.sin(phi)
y = r * np.sin(theta) * np.sin(phi)
z = r * np.cos(phi)
result.append([x, y, z])
return result
npoints = 5000
r = np.sqrt(3)
centroids = [[1, 0, 0], [0, 1, 0], [0, 0, 1], [-1, 0, 0], [0, -1, 0], [0, 0, -1]]
points = point_generator(npoints, r)
# print(points)
# 计算俩个点的距离
def distance(p, q):
if len(p) == len(q):
result = 0
for i in range(len(p)):
result += (p[i] - q[i]) ** 2
return result ** 0.5
else:
print('cannot calculate distance of points from different dimensions')
# 寻找离点最近的面(中心点),并投影到对应的面上
def archive_nearest_pc_pairs(dictionary, centroids, points):
for p in points:
dist = []
for q in centroids:
dist.append(distance(p, q))
nearest_centroid = centroids[dist.index(min(dist))] # 寻找最近的立方体面中心的点距离
add_dict(dictionary, nearest_centroid, p)
archive_nearest_pc_pairs(d, centroids, points)
print(centroids)
# 3种方法计算法向量
def compute_normals(pcd, flag=1):
# 混合搜索 KNN搜索 半径搜索
if (flag == 1):
pcd.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.01, max_nn=20)) # 计算法线,搜索半径1cm,只考虑邻域内的20个点
elif (flag == 2):
pcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamKNN(knn=3)) # 计算法线,只考虑邻域内的20个点
else:
pcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamRadius(radius=0.01)) # 计算法线,搜索半径1cm,只考虑邻域内的20个点
# 计算俩个法向量的夹角可参考 http://mp.ofweek.com/it/a456714148137
# x为第一个法向量,y为第二个法向量
def cal_angle(x, y):
# 分别计算两个向量的模:
l_x = np.sqrt(x.dot(x))
l_y = np.sqrt(y.dot(y))
# print('向量的模=', l_x, l_y)
# 计算两个向量的点积
dian = x.dot(y)
# print('向量的点积=', dian)
# 计算夹角的cos值:
cos_ = dian / (l_x * l_y)
# print('夹角的cos值=', cos_)
# 求得夹角(弧度制):
angle_hu = np.arccos(cos_)
# print('夹角(弧度制)=', angle_hu)
# 转换为角度值:
angle_d = angle_hu * 180 / np.pi
# print('夹角=%f°' % angle_d)
return angle_d
# 初始化法向量dict,key中心点 values法向量点
normals_dict =
pcds = []
for i, (key, value) in enumerate(d.items()):
# print(value)
val = np.array(value)
# 计算点云均值点,并插入到原点云点的第一个点
avg_point = np.mean(val, axis=0) # axis=0,计算每一列的均值
origin_points = np.row_stack((avg_point, val))
# 构造点云数据
pcd = o3d.geometry.PointCloud()
points = o3d.utility.Vector3dVector(origin_points)
pcd.points = points
# 计算法向量,可选择3种方法计算法向量,传值1/2/其他
compute_normals(pcd, 2)
normals = o3d.np.asarray(pcd.normals)
# print('pcd-normals: ', normals)
normals_dict[key] = normals
print('第', str(i + 1), '个面, center:', key, len(pcd.normals), '个点')
# print(np.sum(normals) / len(normals))
# 均值点法向量点
avg_normal = normals[0]
# 遍历计算平均向量与点云向量的夹角(由于第一个点是均值点,所以去除)
for j, (point, point_normal) in enumerate(zip(origin_points[1:], normals[1:])):
# 计算均值点法向量 与 点云点法向量的夹角
print('\\t第 %s 个点, angle: %s' % (
str(j + 1),
cal_angle(np.array(avg_point) - np.array(avg_normal), np.array(point) - np.array(point_normal))))
print("--------------------------------------------------------")
# 可视化法向量点和原始点
pcd.paint_uniform_color([0.5, 0.5, 0.5]) # 把原始点渲染为灰色
pcd.colors[0] = [1, 0, 0] # 原始点云均值点渲染为红色
normal_point = o3d.utility.Vector3dVector(pcd.normals)
normals = o3d.geometry.PointCloud()
normals.points = normal_point
normals.paint_uniform_color((0, 1, 0)) # 点云法向量的点都以绿色显示
normals.colors[0] = [1, 1, 0] # 均值点法向量点渲染为黄色
o3d.visualization.draw_geometries([pcd, normals], "Open3D origin " + str(i + 1) + " VS normals points True",
width=800,
height=600, left=50,
top=50,
point_show_normal=True, mesh_show_wireframe=False,
mesh_show_back_face=False)
o3d.visualization.draw_geometries([pcd, normals], "Open3D origin " + str(i + 1) + " VS normals points False",
width=800,
height=600, left=50,
top=50,
point_show_normal=False, mesh_show_wireframe=False,
mesh_show_back_face=False)
# 加入list以便全量渲染
pcds.append(pcd)
pcds.append(normals)
print(pcds[0], pcds[1], pcds[2], pcds[3], pcds[4], pcds[5],
pcds[6], pcds[7], pcds[8], pcds[9], pcds[10], pcds[11],
len(pcds))
# 同时可视化法向量
o3d.visualization.draw_geometries([pcds[0], pcds[1], pcds[2], pcds[3], pcds[4],
pcds[5], pcds[6], pcds[7], pcds[8], pcds[9], pcds[10], pcds[11]
], "Open3D originAll VS normals points True",
width=800,
height=600, left=50,
top=50,
point_show_normal=True, mesh_show_wireframe=False,
mesh_show_back_face=False)
# 不可视化法向量
o3d.visualization.draw_geometries([pcds[0], pcds[1], pcds[2], pcds[3], pcds[4],
pcds[5], pcds[6], pcds[7], pcds[8], pcds[9],
pcds[10], pcds[11]], "Open3D originAll VS normals points False",
width=800,
height=600, left=50,
top=50,
point_show_normal=False, mesh_show_wireframe=False,
mesh_show_back_face=False)
参考
以上是关于使用Python,Open3D对点云散点投影到面上并可视化,使用3种方法计算面的法向量及与平均法向量的夹角的主要内容,如果未能解决你的问题,请参考以下文章