论文笔记:Region Representation Learning via Mobility Flow
Posted UQI-LIUWJ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了论文笔记:Region Representation Learning via Mobility Flow相关的知识,希望对你有一定的参考价值。
2017 CIKM
1 摘要和介绍
- 使用出租车出行数据学习区域向量表征
- 同时考虑时间动态和多跳位置转换
- ——>通过flow graph和spatial graph学习表征
- 出租车交通流可以作为区域相似度的一种
- A区域和B区域之间流量大
- ——>A和B的特征更相关
- ——>用一个/很相似的vector来表征他们
- 之前的文献中,使用一个转移矩阵来表示流量数据的mobility
- 每一个区域使用一个n维向量表征,其中的第j个元素表示从i到j/从j到i的流量
- ——>使用这样的转移矩阵也会有问题,那就是没有考虑时间动态
- 比如A区域到B区域是早上流量多,C区域到B区域是晚上流量多;但A和C区域在特征上可能是不同的
- 可以创建了一个tensor(加入了时间维度),而不是一个matrix来表征mobility
- ——>使用这样的转移矩阵也会有问题,那就是没有考虑时间动态
- 每一个区域使用一个n维向量表征,其中的第j个元素表示从i到j/从j到i的流量
- 但是这样会存在一定问题
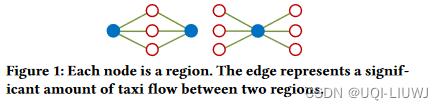
- 比如左图的两个蓝点之间并没有直接的流量 ,没法建模他们的相似性
- ——>解决方法是multi-hop的转换矩阵
- 创建了一个新的flow graph
- 每一个节点表示一定时间间隔内的一个区域
- 每一条边表示不同区域在不同时间间隔内的转移
- 与此同时,论文使用了另一个空间图(捕获区域间的空间邻接关系)
- 创建了一个新的flow graph
- A区域和B区域之间流量大
2 preliminary——generalized inference model
- 输入K个不重叠的区域
 、部分区域的目标属性的观测值(第i个区域的是yi)、所有区域的辅助feature (第i个区域的是
、部分区域的目标属性的观测值(第i个区域的是yi)、所有区域的辅助feature (第i个区域的是  )
) - 目标是估计每个区域的目标属性(第i个区域的是yi)
- 为了预测各个区域的yi,使用如下的回归模型

- 其中α、β和γ是回归模型的参数
- sim(i,j)表示区域i和区域j之间的相似度
- Ni是邻居节点集合
3 问题定义
3.1 输入数据
- 输入数据:
- mobility data
- 包括了n段旅途

- 每段旅途的格式是
 ,分别表示起始和结束位置的坐标和时间
,分别表示起始和结束位置的坐标和时间
- 包括了n段旅途
- 空间信息
- 城市中K个不重叠的位置组成,
- 城市中K个不重叠的位置组成,
- mobility data
3.2 时间增强节点
- 在论文中涉及的一张异构图中,使用时间增强节点来区分区域
- 每个节点被记为
 ,表示t时刻的区域i
,表示t时刻的区域i - ——>一共有KT个时间增强节点
- 每个节点被记为
- 给定了这些时间增强节点后,可以捕获两种关系
- 从不同区域之间的mobility flow中得到的关系——>图Gf
- 空间邻接关系——>图Gs
- 论文中提出的方法从两种图中同时学习空间表征
3.3 问题定义
- 给定flow graph Gf和spatial graph Gs,目标是学到每个时间增强节点的表征

- 两个区域embedding之间的相似度用
 定义
定义
4 方法
4.1 flow graph

- 每一条边表示的时T时刻在位置A,T+1时刻在位置B
- 边权重就是流量大小
- 个人理解,图中t=1时刻的r2能够连接t=2时刻的r2,是因为这辆出租车载客从r2出发,兜了一圈又回来了(可能是乘客下了,又回到了扬招点)
但这个图会存在三个问题
- 无法描述“停留在某个点"这类情况
- ——>r2(t=1)到让r2(t=2)有连边,是环线的结果,并不是停留在原地的结果
- 数据很稀疏
- 有些区域在某些时刻可能没有交通流数据
- flow graph将所有时间加强点都视为独立的点。但是,不同时刻相同/相近点之间的关系无法刻画
4.2 spatial graph
- 节点集和flow graph的一样
- 不同时刻相同点之间有连边,数值为1
- 只有相邻时刻之间的点会有连边(t=1这一列的点和t=2这一列的点之间有边;t=1这一列的点和t=3这一列的点之间就没有边)
- 这种连边的边权重大小是
 ,其中C是参数,dij表示i和j区域的距离
,其中C是参数,dij表示i和j区域的距离
- 这种连边的边权重大小是

4.3 异构图
将上面的两个图拼起来
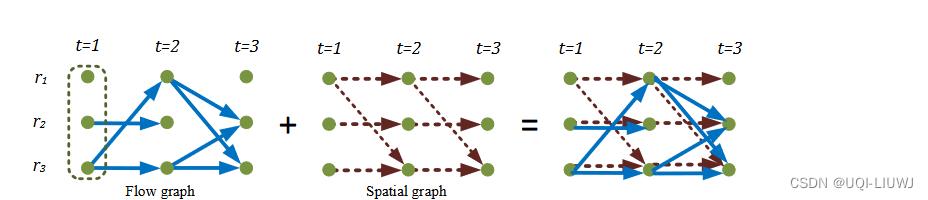
- 这样可以表示”停留在某地“这种情况了
- 同时由于节点是时间增强节点,所以时序关系以及多跳时序关系都是保留的
4.4 embedding的目标
4.4.1 单图上
- 几个定义
- 路径(path)

- 一条路径包含点——>

- 包含的路径集合

- 一个点的上下文(context)——所有包含的路径上的点(除了之外)

- 路径(path)
- 使用skip-gram模型学习embedding
- 理论值

- 在t时刻从点i出发,目标是点c的概率
- 实际值

- P表示每一条从出发到vc的路径
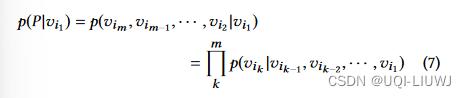
- 由于马尔可夫性质,7可以写成

- P表示每一条从
- f是单图上对应边的权重
-
目标是理想值和理论值越近越好
-

-
D是衡量两个分布距离的(常见的有KL散度)
-
- 理论值
4.4.2 异构图
spatial 图类似
所以总的目标是
4.5 embedding学习的优化
4.4 存在的问题有:
- (5)式要计算所有对的话,需要
 次操作(KT个点,两两成对)
次操作(KT个点,两两成对) - (9)式需要计算所有的路径(路径数量式节点数量的指数倍)
解决方法:负采样/随机游走
以上是关于论文笔记:Region Representation Learning via Mobility Flow的主要内容,如果未能解决你的问题,请参考以下文章