Python基于OpenMV的色块自动追踪与云台控制(代码电赛可用直接上手)
Posted 阿汪先生
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Python基于OpenMV的色块自动追踪与云台控制(代码电赛可用直接上手)相关的知识,希望对你有一定的参考价值。
OpenMV的色块自动追踪与云台控制(代码)
1、代码
import sensor, image, time
from pid import PID
from pyb import Servo #调用库
pan_servo=Servo(1)
tilt_servo=Servo(2) #阿汪先生的博客
red_threshold = (0, 98, 37, 127, -32, 89) #红色色素块
#pan_pid = PID(p=0.06,i=0.1, imax=90) #脱机运行或者禁用图像传输,使用这个PID
#tilt_pid = PID(p=0.05,i=0.05, imax=90) #脱机运行或者禁用图像传输,使用这个PID
pan_pid = PID(p=0.06,d=0.01,i=0.02, imax=100)#在线调试使用这个PID
tilt_pid = PID(p=0.07,d=0.01,i=0.02, imax=75)#在线调试使用这个PID
#由于openmv脱机运行帧率会提高,运行性能会有所改变,所以需要设置“在线联机调试”和“脱机运行”的两个参数
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use RGB565.
sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
sensor.skip_frames(10) # Let new settings take affect.
sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS. #基本参数设置
def find_max(blobs):
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
return max_blob #找到视野中的最大色素块
while(True):
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot() # Take a picture and return the image.
blobs = img.find_blobs([red_threshold]) #biob函数的详细内容可去星瞳科技的官网查询
if blobs:
max_blob = find_max(blobs)
# pan_error = max_blob.cx()-img.width()/2
# tilt_error = max_blob.cy()-img.height()/2
pan_error = img.width()/2-max_blob.cx() # 横轴方向上的修正参数
tilt_error = img.height()/2-max_blob.cy() # 纵轴方向上的修正参数
# pan_error = 80+max_blob.cx()
# tilt_error = 60+max_blob.cy()
print("pan_error: ", pan_error) #在参数调试窗口打印色块中心坐标与视野中心坐标的偏离值,便于调试与修正
img.draw_rectangle(max_blob.rect()) # rect #在色块外围四周处画框
img.draw_cross(max_blob.cx(), max_blob.cy()) # cx, cy #色块中心坐标处画十字
pan_output=pan_pid.get_pid(pan_error,1)/2
tilt_output=tilt_pid.get_pid(tilt_error,1)/2
print("pan_output",pan_output) #在参数调试窗口打印坐标值,便于调试与修正
pan_servo.angle(pan_servo.angle()+pan_output) #输出横轴方向上的PWM波控制云台追踪色块标志
#openmv上P7为控制云台上舵机的输出引脚(摄像头上下移动)
tilt_servo.angle(tilt_servo.angle()-tilt_output) #输出纵轴方向上的PWM波控制云台追踪色块标志
#openmv上P7为控制云台下舵机的输出引脚(摄像头左右移动)
############## //阿汪先生的博客.ws ##############
pid.py文件可到星瞳科技的官网下载。
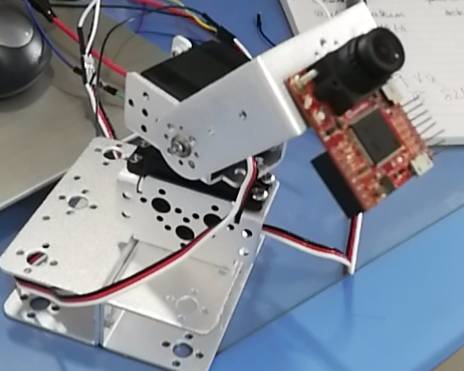
2、实物图
3、演示视频:https://pan.baidu.com/s/17x10UiIe-iVjh9RSfSzBzw.
以上是关于Python基于OpenMV的色块自动追踪与云台控制(代码电赛可用直接上手)的主要内容,如果未能解决你的问题,请参考以下文章