-- wowo
Posted Wu_Being
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了-- wowo相关的知识,希望对你有一定的参考价值。
文章目录
1. 前言
Linux内核提供了三种Suspend: Freeze、Standby和STR(Suspend to RAM),在用户空间向”/sys/power/state”文件分别写入”freeze”、”standby”和”mem”,即可触发它们。
内核中,Suspend及Resume过程涉及到PM Core、Device PM、各个设备的驱动、Platform dependent PM、CPU control等多个模块,涉及了console switch、process freeze、CPU hotplug、wakeup处理等过个知识点。就让我们跟着内核代码,一一见识它们吧。
2. Suspend功能有关的代码分布
内核中Suspend功能有关的代码包括PM core、Device PM、Platform PM等几大块,具体如下:
1)PM Core
kernel/power/main.c----提供用户空间接口(/sys/power/state)
kernel/power/suspend.c-—Suspend功能的主逻辑
kernel/power/suspend_test.c----Suspend功能的测试逻辑
kernel/power/console.c----Suspend过程中对控制台的处理逻辑
kernel/power/process.c----Suspend过程中对进程的处理逻辑
2)Device PM
drivers/base/power/*----具体可参考“Linux电源管理(4)_Power Management Interface”的描述。
设备驱动----具体设备驱动的位置,不再涉及。
3)Platform dependent PM
include/linux/suspend.h----定义platform dependent PM有关的操作函数集
arch/xxx/mach-xxx/xxx.c或者
arch/xxx/plat-xxx/xxx.c----平台相关的电源管理操作
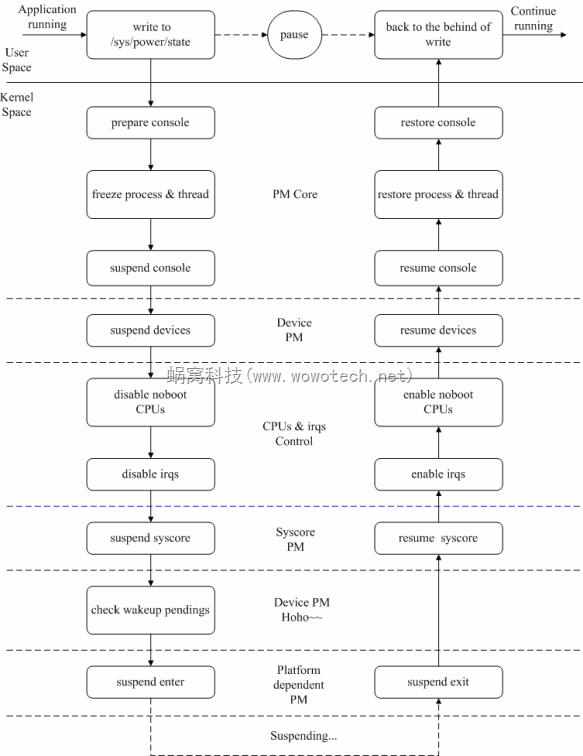
3. suspend&resume过程概述
下面图片对Linux suspend&resume过程做了一个概述,读者可以顺着这个流程阅读内核源代码。具体的说明,可以参考后面的代码分析。
4. 代码分析
4.1 suspend入口
在用户空间执行如下操作:(如果插着USB测试是无法进入休眠的,可用串口,android 上层是libsuspend 模块执行如下操作)
echo “freeze” > /sys/power/state
echo “standby” > /sys/power/state
echo "mem" > /sys/power/state
会通过sysfs触发suspend的执行,相应的处理代码如下:
上面执行echo "mem" > /sys/power/state,文件系统就会自动调用下面state_store函数
static ssize_t state_store(struct kobject *kobj, struct kobj_attribute *attr,
const char *buf, size_t n)
suspend_state_t state;
int error;
error = pm_autosleep_lock();
if (error)
return error;
if (pm_autosleep_state() > PM_SUSPEND_ON)
error = -EBUSY;
goto out;
state = decode_state(buf, n);
if (state < PM_SUSPEND_MAX)
error = pm_suspend(state);
else if (state == PM_SUSPEND_MAX)
error = hibernate();
else
error = -EINVAL;
out:
pm_autosleep_unlock();
return error ? error : n;
power_attr(state);
power_attr(展开一下就知道了,是个宏定义)定义了一个名称为state的attribute文件,该文件的store接口为state_store,该接口在lock住autosleep功能后,解析用户传入的buffer(freeze、standby or mem),转换成state参数。
state参数的类型为suspend_state_t,在include\\linux\\suspend.h中定义,为电源管理状态在内核中的表示。具体如下:
typedef int __bitwise suspend_state_t;
#define PM_SUSPEND_ON ((__force suspend_state_t) 0)
#define PM_SUSPEND_FREEZE ((__force suspend_state_t) 1)
#define PM_SUSPEND_STANDBY ((__force suspend_state_t) 2)
#define PM_SUSPEND_MEM ((__force suspend_state_t) 3)
#define PM_SUSPEND_MIN PM_SUSPEND_FREEZE
#define PM_SUSPEND_MAX ((__force suspend_state_t) 4)
根据state的值,如果不是(PM_SUSPEND_MAX,对应hibernate功能),则调用pm_suspend接口,进行后续的处理。
pm_suspend在kernel/power/suspend.c定义,处理所有的suspend过程。
4.2 pm_suspend & enter_state
pm_suspend的实现非常简单,简单的做一下参数合法性判断,直接调用enter_state接口,如下:
int pm_suspend(suspend_state_t state)
int error;
if (state <= PM_SUSPEND_ON || state >= PM_SUSPEND_MAX)
return -EINVAL;
error = enter_state(state);
if (error)
suspend_stats.fail++;
dpm_save_failed_errno(error);
else
suspend_stats.success++;
return error;
enter_state代码为:
static int enter_state(suspend_state_t state)
int error;
if (!valid_state(state))
return -ENODEV;
if (!mutex_trylock(&pm_mutex))
return -EBUSY;
if (state == PM_SUSPEND_FREEZE)
freeze_begin();
printk(KERN_INFO "PM: Syncing filesystems ... ");
sys_sync();
printk("done.\\n");
pr_debug("PM: Preparing system for %s sleep\\n", pm_states[state]);
error = suspend_prepare(state);
if (error)
goto Unlock;
if (suspend_test(TEST_FREEZER))
goto Finish;
pr_debug("PM: Entering %s sleep\\n", pm_states[state]);
pm_restrict_gfp_mask();
error = suspend_devices_and_enter(state);
pm_restore_gfp_mask();
Finish:
pr_debug("PM: Finishing wakeup.\\n");
suspend_finish();
Unlock:
mutex_unlock(&pm_mutex);
return error;
主要工作包括:
- a)调用valid_state,判断该平台是否支持该电源状态。
suspend的最终目的,是让系统进入可恢复的挂起状态,而该功能必须有平台相关代码的参与才能完成,因此内核PM Core就提供了一系列的回调函数(封装在platform_suspend_ops中),让平台代码(如arch/arm/mach-xxx/pm.c)实现,然后由PM Core在合适的时机调用。这些回调函数包含一个valid函数,就是用来告知PM Core,支持哪些state。
最后看一下valid_state的实现(删除了无关代码):
bool valid_state(suspend_state_t state)
if (state == PM_SUSPEND_FREEZE)
return true;
/*
* PM_SUSPEND_STANDBY and PM_SUSPEND_MEMORY states need lowlevel
* support and need to be valid to the lowlevel
* implementation, no valid callback implies that none are valid.
*/
return suspend_ops && suspend_ops->valid && suspend_ops->valid(state);
如果是freeze,无需平台代码参与即可支持,直接返回true。对于standby和mem,则需要调用suspend_ops的valid回掉,由底层平台代码判断是否支持。
-
b)加互斥锁,只允许一个实例处理suspend。
-
c)如果state是freeze,调用freeze_begin,进行suspend to freeze相关的特殊动作。我会在后面统一分析freeze的特殊动作,这里暂不描述。
-
d)打印提示信息,同步文件系统。
-
e)调用suspend_prepare,进行suspend前的准备,主要包括switch console和process&thread freezing。如果失败,则终止suspend过程。
-
f)然后,调用
suspend_devices_and_enter接口,该接口负责suspend和resume的所有实际动作。- 前半部分,suspend console、suspend device、关中断、调用平台相关的suspend_ops使系统进入低功耗状态。
- 后半部分,在系统被事件唤醒后,处理相关动作,调用平台相关的suspend_ops恢复系统、开中断、resume device、resume console。
-
g)最后,调用suspend_finish,恢复(或等待恢复)process&thread,还原console。
4.3 suspend_prepare
suspend_prepare的代码如下:
static int suspend_prepare(suspend_state_t state)
int error;
if (need_suspend_ops(state) && (!suspend_ops || !suspend_ops->enter))
return -EPERM;
pm_prepare_console();
error = pm_notifier_call_chain(PM_SUSPEND_PREPARE);
if (error)
goto Finish;
error = suspend_freeze_processes();
if (!error)
return 0;
suspend_stats.failed_freeze++;
dpm_save_failed_step(SUSPEND_FREEZE);
Finish:
pm_notifier_call_chain(PM_POST_SUSPEND);
pm_restore_console();
return error;
主要工作为:
-
a)检查suspend_ops是否提供了.enter回调,没有的话,返回错误。
-
b)调用
pm_prepare_console,将当前console切换到一个虚拟console并重定向内核的kmsg(需要的话)。该功能称作VT switch,后面我会在稍微详细的介绍一下,但Linux控制台子系统是相当复杂的,更具体的分析,要在控制台子系统的分析文章中说明。 -
c)调用
pm_notifier_call_chain,发送suspend开始的消息(PM_SUSPEND_PREPARE),后面会详细描述。 -
d)调用
suspend_freeze_processes,freeze用户空间进程和一些内核线程。该功能称作freezing-of-tasks,我会专门用一篇文章去分析它。本文就不再详细说明了。 -
e)如果freezing-of-tasks失败,调用pm_restore_console,将console切换回原来的console,并返回错误,以便能终止suspend。
4.4 suspend_devices_and_enter
suspend_devices_and_enter的过程较为复杂,代码实现如下:
int suspend_devices_and_enter(suspend_state_t state)
int error;
bool wakeup = false;
if (need_suspend_ops(state) && !suspend_ops)
return -ENOSYS;
trace_machine_suspend(state);
if (need_suspend_ops(state) && suspend_ops->begin)
error = suspend_ops->begin(state);
if (error)
goto Close;
suspend_console();
ftrace_stop();
suspend_test_start();
error = dpm_suspend_start(PMSG_SUSPEND);
if (error)
printk(KERN_ERR "PM: Some devices failed to suspend\\n");
goto Recover_platform;
suspend_test_finish("suspend devices");
if (suspend_test(TEST_DEVICES))
goto Recover_platform;
do
error = suspend_enter(state, &wakeup);
while (!error && !wakeup && need_suspend_ops(state)
&& suspend_ops->suspend_again && suspend_ops->suspend_again());
Resume_devices:
suspend_test_start();
dpm_resume_end(PMSG_RESUME);
suspend_test_finish("resume devices");
ftrace_start();
resume_console();
Close:
if (need_suspend_ops(state) && suspend_ops->end)
suspend_ops->end();
trace_machine_suspend(PWR_EVENT_EXIT);
return error;
Recover_platform:
if (need_suspend_ops(state) && suspend_ops->recover)
suspend_ops->recover();
goto Resume_devices;
-
a)再次检查平台代码是否需要提供以及是否提供了suspend_ops。
-
b)调用suspend_ops的begin回调(有的话),通知平台代码,以便让其作相应的处理(需要的话)。可能失败,需要跳至Close处执行恢复操作(suspend_ops->end)。
-
c)调用
suspend_console,挂起console。该接口由"kernel\\printk.c"实现,主要是hold住一个lock,该lock会阻止其它代码访问console。 -
d)调用ftrace_stop,停止ftrace功能。ftrace是一个很有意思的功能,后面再介绍。
-
e)调用
dpm_suspend_start,调用所有设备的->prepare和->suspend回调函数(具体可参考“Linux电源管理(4)_Power Management Interface”的描述),suspend需要正常suspend的设备。suspend device可能失败,需要跳至 Recover_platform,执行recover操作(suspend_ops->recover)。 -
f)以上都是suspend前的准备工作,此时,调用suspend_enter接口,使系统进入指定的电源状态。该接口的内容如下:
static int suspend_enter(suspend_state_t state, bool *wakeup)
int error;
if (need_suspend_ops(state) && suspend_ops->prepare)
error = suspend_ops->prepare();
if (error)
goto Platform_finish;
error = dpm_suspend_end(PMSG_SUSPEND);
if (error)
printk(KERN_ERR "PM: Some devices failed to power down\\n");
goto Platform_finish;
if (need_suspend_ops(state) && suspend_ops->prepare_late)
error = suspend_ops->prepare_late();
if (error)
goto Platform_wake;
if (suspend_test(TEST_PLATFORM))
goto Platform_wake;
/*
* PM_SUSPEND_FREEZE equals
* frozen processes + suspended devices + idle processors.
* Thus we should invoke freeze_enter() soon after
* all the devices are suspended.
*/
if (state == PM_SUSPEND_FREEZE)
freeze_enter();
goto Platform_wake;
error = disable_nonboot_cpus();
if (error || suspend_test(TEST_CPUS))
goto Enable_cpus;
arch_suspend_disable_irqs();
BUG_ON(!irqs_disabled());
error = syscore_suspend();
if (!error)
*wakeup = pm_wakeup_pending();
if (!(suspend_test(TEST_CORE) || *wakeup))
error = suspend_ops->enter(state);
events_check_enabled = false;
syscore_resume();
arch_suspend_enable_irqs();
BUG_ON(irqs_disabled());
Enable_cpus:
enable_nonboot_cpus();
Platform_wake:
if (need_suspend_ops(state) && suspend_ops->wake)
suspend_ops->wake();
dpm_resume_start(PMSG_RESUME);
Platform_finish:
if (need_suspend_ops(state) && suspend_ops->finish)
suspend_ops->finish();
return error;
-
f) suspend_enter 函数说明
-
f1)该接口处理完后,会通过返回值告知是否enter成功,同时通过wakeup指针,告知调用者,是否有wakeup事件发生,导致电源状态切换失败。
-
f2)调用suspend_ops的prepare回调(有的话),通知平台代码,以便让其在即将进行状态切换之时,再做一些处理(需要的话)。该回调可能失败(平台代码出现意外),失败的话,需要跳至Platform_finish处,调用suspend_ops的finish回调,执行恢复操作。
-
f3)调用
dpm_suspend_end,调用所有设备的->suspend_late和->suspend_noirq回调函数(具体可参考“Linux电源管理(4)_Power Management Interface”的描述),suspend late suspend设备和需要在关中断下suspend的设备。需要说明的是,这里的noirq,是通过禁止所有的中断线的形式,而不是通过关全局中断的方式。同样,该操作可能会失败,失败的话,跳至Platform_finish处,执行恢复动作。 -
f4)调用suspend_ops的prepare_late回调(有的话),通知平台代码,以便让其在最后关头,再做一些处理(需要的话)。该回调可能失败(平台代码出现意外),失败的话,需要跳至Platform_wake处,调用suspend_ops的wake回调,执行device的resume、调用suspend_ops的finish回调,执行恢复操作。
-
f5)如果是
suspend to freeze,执行相应的操作,包括冻结进程、suspended devices(参数为PM_SUSPEND_FREEZE)、cpu进入idle。如果有任何事件使CPU从idle状态退出,跳至Platform_wake处,执行wake操作。 -
f6)调用
disable_nonboot_cpus,禁止所有的非boot cpu。也会失败,执行恢复操作即可。 -
f7)调用
arch_suspend_disable_irqs,关全局中断。如果无法关闭,则为bug。 -
f8)调用
syscore_suspend,suspend system core。同样会失败,执行恢复操作即可。有关syscore,我会在另一篇文章中详细描述。 -
f9)如果很幸运,以上操作都成功了,那么,切换吧。不过,别高兴太早,还得调用
pm_wakeup_pending检查一下,这段时间内,是否有唤醒事件发生,如果有就要终止suspend。 -
f10)如果一切顺利,调用suspend_ops的enter回调,进行状态切换。这时,系统应该已经suspend了……
-
f11)suspend过程中,唤醒事件发生,系统唤醒,该函数接着执行resume动作,并最终返回。resume动作基本上是suspend的反动作,就不再继续分析了。
-
f12)或者,由于意外,suspend终止,该函数也会返回。
-
-
g)suspend_enter返回,如果返回原因不是发生错误,且不是wakeup事件。则调用suspend_ops的
suspend_again回调,检查是否需要再次suspend。再什么情况下要再次suspend呢?需要看具体的平台了,谁知道呢。 -
h)继续resume操作,resume device、start ftrace、resume console、suspend_ops->end等等。
-
i)该函数返回后,表示系统已经resume。
4.5 suspend_finish
比较简单:
static void suspend_finish(void)
suspend_thaw_processes();
pm_notifier_call_chain(PM_POST_SUSPEND);
pm_restore_console();
-
a)恢复所有的用户空间进程和内核线程。
-
b)发送suspend结束的通知。
-
c)将console切换回原来的。
5. 重要知识点回顾
5.1 VT switch
通常情况下,系统控制台模块(drivers\\tty\\vt\\)会在suspend的过程中,重新分配一个console,并将控制台切换到该console上。然后在resume时,切换回旧的console。这就是VT switch功能。VT switch是很耗时的,因此内核提供了一些机制,控制是否使用这个功能:
-
1)提供一个接口函数pm_set_vt_switch(·drivers\\tty\\vt\\vt_ioctl.c),方便其它内核模块从整体上关闭或者开启VT switch功能。
-
2)VT switch全局开关处于开启状态时,满足如下的一种条件(可参考kernel\\power\\console.c相关的描述),即会使能VT switch
-
a)有console driver调用pm_vt_switch_required接口,显式的要求使能VT switch。PM core的console模块会把这些信息记录在一个名称为pm_vt_switch_list的链表中。
-
b)系统禁止在suspend的过程中suspend console(由kernel/printk.c中的console_suspend_enabled变量控制)。很有可能需要使用console查看suspend过程,此时为了使console不混乱,有必要进行VT switch。
-
c)没有任何console driver关心是否需要VT switch,换句话说没有任何driver调用pm_vt_switch_required接口要求使能或禁止VT switch功能。此时会按照旧的习惯,进行VT switch。
-
因此,suspend过程对console的处理分为4步:
- prepare console:负责在需要VT swich时,将当前console切换到SUSPEND console。
int pm_prepare_console(void)
if (!pm_vt_switch())
return 0;
orig_fgconsole = vt_move_to_console(SUSPEND_CONSOLE, 1);
if (orig_fgconsole < 0)
return 1;
orig_kmsg = vt_kmsg_redirect(SUSPEND_CONSOLE);
return 0;
-
suspend console:挂起console,由kernel/printk.c实现,主要是hold住console用的互斥锁,使他人无法使用console。
-
resume console:对console解锁。
-
restore console:将console恢复为初始的console。
void pm_restore_console(void)
if (!pm_vt_switch())
return;
if (orig_fgconsole >= 0)
vt_move_to_console(orig_fgconsole, 0);
vt_kmsg_redirect(orig_kmsg);
也许,您会问,why VT switch?先留着这个疑问吧,等到分析控制台时再回答。
5.2 freezing of task
进程的freezing功能,是suspend、hibernate等电源管理功能的组成部分,在新版本内核中,它被独立出来,作为一个独立的电源管理状态(freeze)。该功能的目的,是在电源管理的状态切换过程中,确保所有用户空间进程和部分内核线程处于一个稳定的状态。有关该功能的具体描述,请参考wowotech后续的文章。
5.3 PM notifier
PM notifier是基于内核blocking notifier功能实现的(可参考“从基本理解到深入探究 Linux kernel 通知链(notifier chain)”)。blocking notifier提供了一种kernel内部的消息通知机制,消息接受者通过notifier注册的方式,注册一个回调函数,关注消息发送者发出的notifier。当消息产生时,消息产生者通过调用回调函数的形式,通知消息接受者。这种调用,是可以被阻塞的,因此称作blocking notifier。
那suspend功能为什么使用notifier呢?原因可能有多种,这里我举一个例子,这是我们日常开发中可能会遇到的。
由之前的描述可知,suspend过程中,suspend device发生在进程被freeze之后,resume device发生在进程被恢复之前。那么:
-
1)如果有些设备就需要在freeze进程之前suspend怎么办?
-
2)如果有些设备的resume动作需要较多延时,或者要等待什么事情发生,那么如果它的resume动作发生在进程恢复之前,岂不是要阻止所有进程的恢复?更甚者,如果该设备要等待某个进程的数据才能resume,怎么办?
再来看suspend_prepare和suspend_finish中的处理:
static int suspend_prepare(suspend_state_t state)
…
error = pm_notifier_call_chain(PM_SUSPEND_PREPARE);
if (error)
goto Finish;
error = suspend_freeze_processes();
…
static void suspend_finish(void)
suspend_thaw_processes();
pm_notifier_call_chain(PM_POST_SUSPEND);
pm_restore_console();
原来PM notifier是在设备模型的框架外,开了一个后门,那些比较特殊的driver,可以绕过设备模型,直接接收PM发送的suspend信息,以便执行自身的suspend动作。特别是resume时,可以在其它进程都正好工作的时候,只让suspend进程等待driver的resume。
感兴趣的读者,可以围观一下下面这个活生生的例子(顺便提一下,好的设计是不应该有例外的):
drivers\\video\\omap2\\dss\\core.c
5.4 device PM ops 和platform PM ops的调用时机
对Linux驱动工程师来说,device PM ops和platform PM ops就是电源管理(suspend)的全部,只要在合适的地方,实现合适的回调函数,即可实现系统的电源管理。但现实太复杂了,以至于kernel提供的这两个数据结构也很复杂,再回忆一下,如下:
struct dev_pm_ops
int (*prepare)(struct device *dev);
void (*complete)(struct device *dev);
int (*suspend)(struct device *dev);
int (*resume)(struct device *dev);
int (*freeze)(struct device *dev);
int (*thaw)(struct device *dev);
int (*poweroff)(struct device *dev)