自动驾驶 Apollo 源码分析系列,感知篇:感知融合代码的基本流程
Posted frank909
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶 Apollo 源码分析系列,感知篇:感知融合代码的基本流程相关的知识,希望对你有一定的参考价值。
说起自动驾驶感知系统,大家都会谈论到感知融合,这涉及到不同传感器数据在时间、空间的对齐和融合,最终的结果将提升自动驾驶系统的感知能力,因为我们都知道单一的传感器都是有缺陷的。本篇文章梳理 Apollo 6.0 中的感知数据融合基本流程。
感知架构
文章开始前,还是需要先看一看 Apollo 中感知的整体架构。
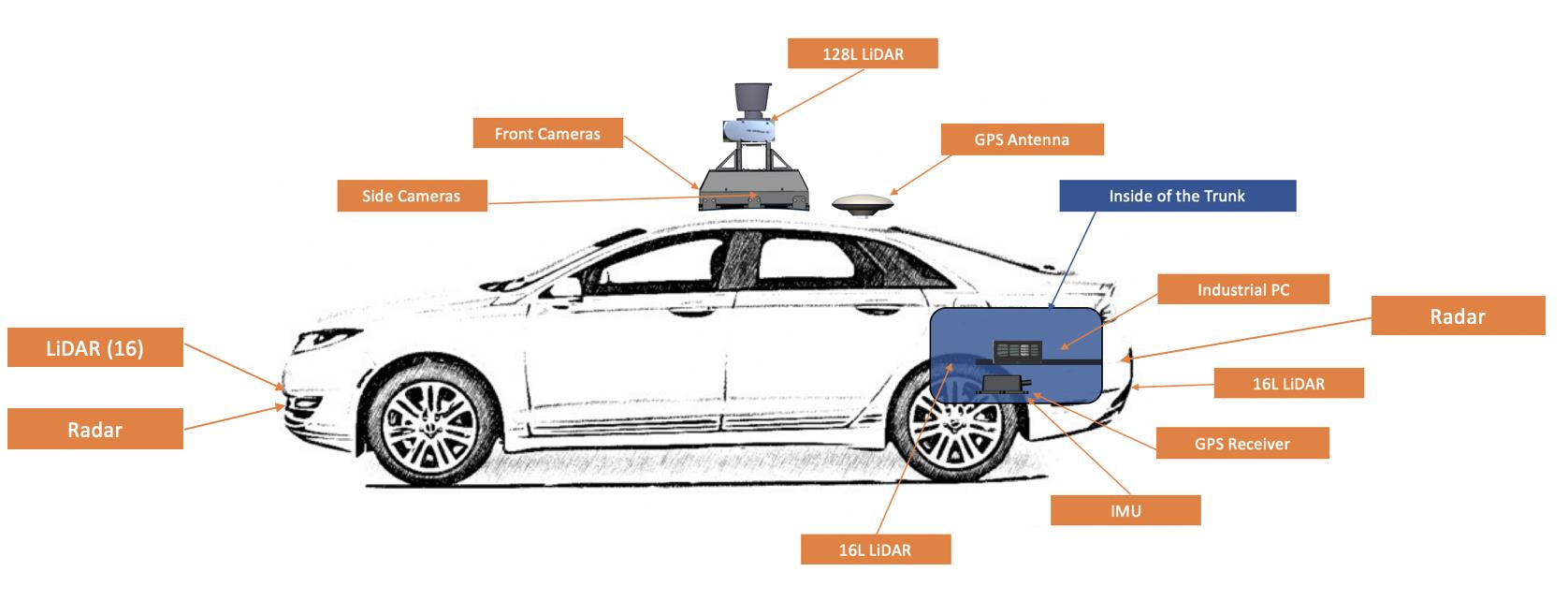
它有这么多传感器。
那感知融合,最终要融合什么呢?

Apollo 的感知系统的结果要以分为 2 个大类:
- 障碍物检测(车、行人或者其它交通要素)
- 红绿灯检测
借助于激光雷达和深度学习,Apollo 的感知模块能够输出障碍物的 3D 信息。
Fusion 流程
1. Fusion 模块在哪里启动?
之前说过 Apollo 的组件是在 CyberRT 的框架中运行,关键概念是 Component。
Perception 是一个大的 Component,它包含了很多子 Component,而数据融合作为一个子 Component 存在。

这个是在
modules/perception/production/dag/dag_streaming_perception.dag
中定义的。
所以,我们需要去找 FusionComponent。
并且,我们知道了它的配置在 fusion_component_conf.pb.txt 中。
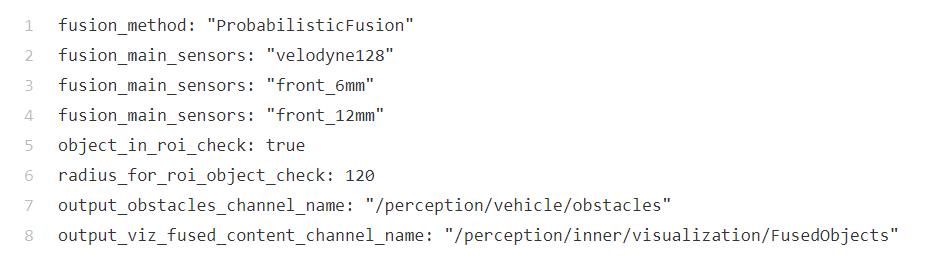
能够得到以下信息:
- 融合方法:ProbabilisticFusion
- 主要参与融合的传感器:Lidar 和 2 个焦距不一样的 Camera
- 融合结果存放到 obstacles 当中。
2. FusionComponent 的初始化
Fusion Component 的地址是这个:
modules/perception/onboard/component/fusion_component.cc
Init 方法也没有几行代码

第一步,加载 config 参数,文章前面刚已经张贴了。

对于融合方法、传感器名称都是直接用 std::string 类型保存。
我们需要关心代码后面部分的 InitAlgorithmPlugin() 方法,这个是用来初始化 Component 涉及的算法的。
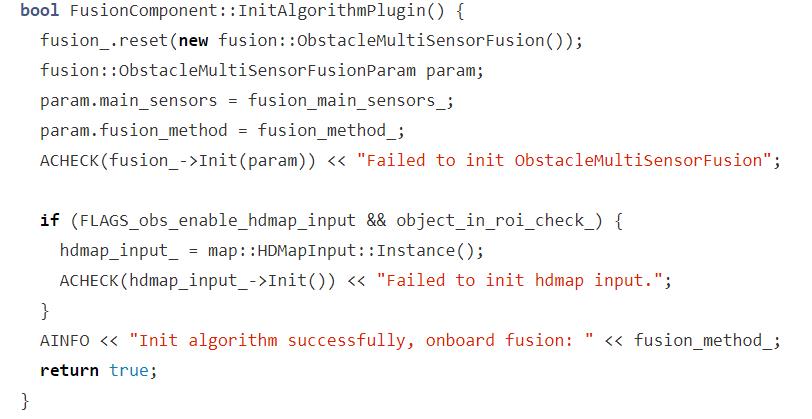
看来 fusion::ObstacleMultiSensorFusion 运用了设计模式,猜测应该是一个简单的工厂模式类,我们去看看究竟。
所以我们需要找 BaseFusionSystemRegisterer,但有意思的地方是直接找不到的。
只找到这个。
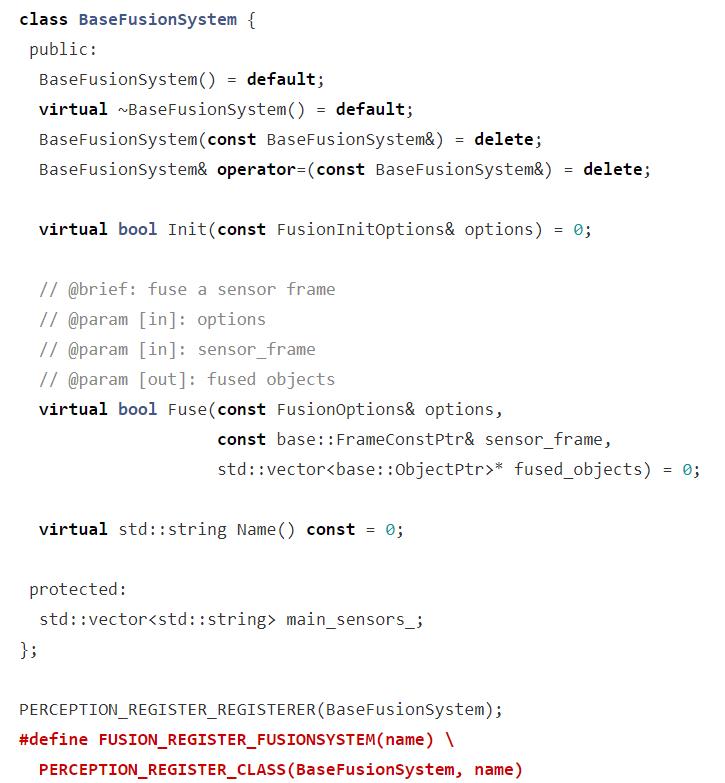
关键在后面两段代码,应该是宏定义。
这需要追踪 Perception 这个模块的 Register 逻辑 。
文件路径:modules/perception/lib/registerer/registerer.h

果然是宏定义,顺着这个定义,我们来实例进行翻译一下。
PERCEPTION_REGISTER_REGISTERER(BaseFusionSystem)这一行展开会发生什么呢?
会定义一个新的类
class BaseFusionSystem
typedef ::apollo::perception::lib::Any Any;
typedef ::apollo::perception::lib::FactoryMap FactoryMap;
public:
static BaseFusion *GetInstanceByName(const ::std::string &name)
FactoryMap &map =
::apollo::perception::lib::GlobalFactoryMap()[BaseFusion];
FactoryMap::iterator iter = map.find(name);
if (iter == map.end())
for (auto c : map)
AERROR << "Instance:" << c.first;
AERROR << "Get instance " << name << " failed.";
return nullptr;
Any object = iter->second->NewInstance();
return *(object.AnyCast<base_class *>());
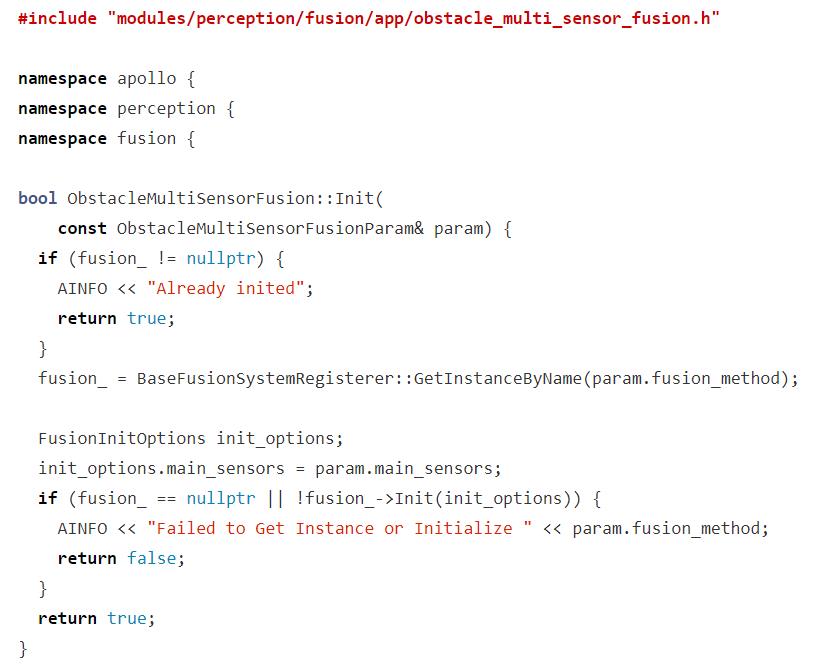
我们再看这行代码:
fusion_ = BaseFusionSystemRegisterer::GetInstanceByName(param.fusion_method);
这就对应得上了。
但有个细节,BaseFusionSystemRegister 中需要 FactoryMap 去查找对应 name 的 Object。
这个操作同样和宏定义脱离不了关系。

这是 registerer.h 中的定义。
而 BaseFusionSystemRegisterer.h 中最后的代码是:
#define FUSION_REGISTER_FUSIONSYSTEM(name) \\
PERCEPTION_REGISTER_CLASS(BaseFusionSystem, name)
结合前面的配置信息,我们知道在 ObstacleMultiSensorFusion::Init()中 fusion_ 将由 ProbobilisticFusion 实现,那么这个类在哪里呢?
modules/perception/fusion/lib/fusion_system/probabilistic_fusion/probabilistic_fusion.cc


成员变量有 trackers_、macher_、gate_keeper_ 这些都是目标跟踪相关的,到这里目标跟踪的轮廓慢慢浮现。
3. Fusion 的流程框架
回到 FusionComponent 中来,我们知道核心方法是 Proc。
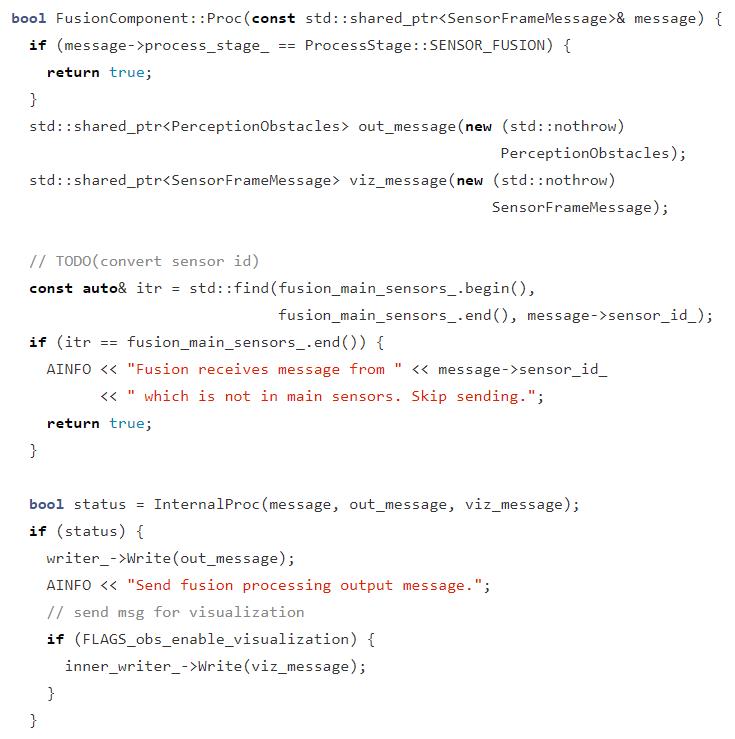
核心的方法是 InternalProc,那么 InternalProc 中的核心代码是什么呢?
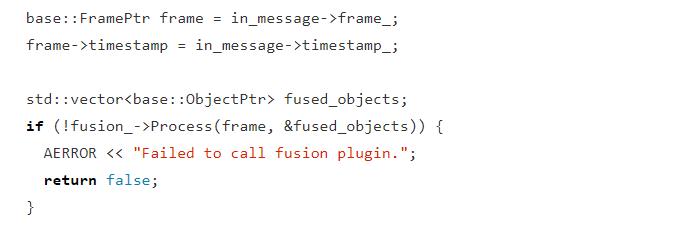
又跳到了 fusion 中的 Process,好吧,我们再跳转到对应的代码当中。

然后跟踪到这里。

代码中也注释的比较,明白主要是 4 步。
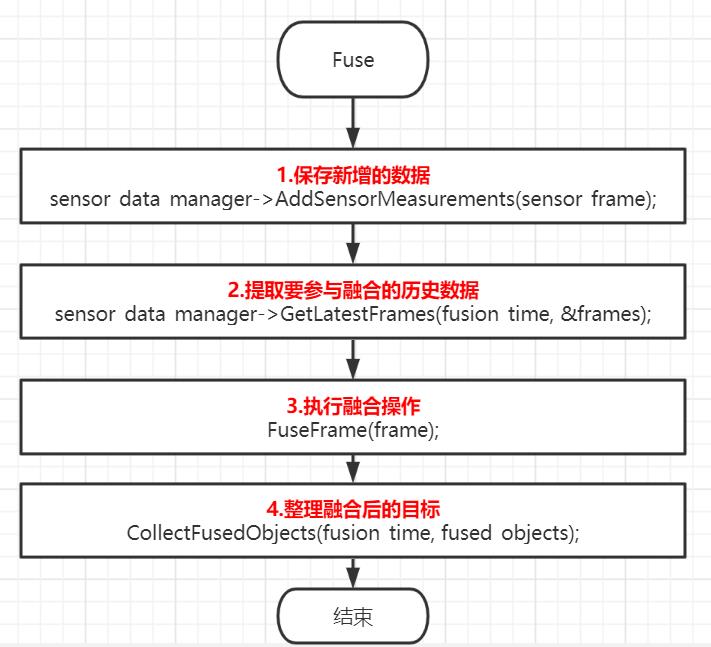
工程量比较大,下面分开讲解。
3.1 AddSensorMeasurements
执行对象是 SensorManager。

核心代码是 frame_ptr,这样看来 SensorPtr 也要看看它的内部长什么样子。
class Sensor
public:
Sensor() = delete;
...省略部分...
private:
FRIEND_TEST(SensorTest, test);
base::SensorInfo sensor_info_;
double latest_query_timestamp_ = 0.0;
std::deque<SensorFramePtr> frames_;
static size_t kMaxCachedFrameNum;
现在我们能够知道,Sensor 中会保存一个最大缓存数值,上一次查询时间,SensorInfo 信息。

代码非常简单,添加 Frame 时直接向 dequeue中添加,如果缓存满了则直接删掉头部的数据,也就是过期的数据。
3.2 getLatesFrame()
这一步是要提取上一次缓存的 Frame 数据。
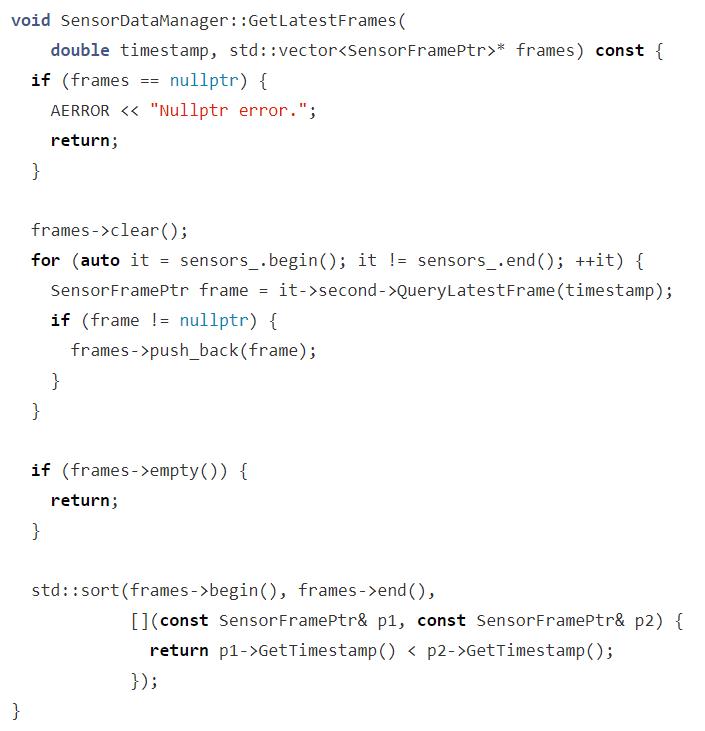
前面说过 Apollo 中感知融合的 Sensor 有 3 个,那么进行数据融合时就不得不考虑这一次要参与融合的 Frame 是哪个 sensor 的数据。
所以,上面的代码会提取每一个 sensor 上一次缓存的数据,然后调用 std::sort()
方面依据时间戳大小进行排序。
而 sensor 中怎么获取上一帧代码,那实在是太简单了。

3.3 FuseFrame
取到数据后就要开始进行融合了。

3 个步骤:
- 前景目标融合跟踪
- 背景目标融合跟踪
- 移除已丢失的目标
从这里开始就要涉及到算法部分了,目标跟踪是要确认目标状态的。

上图的蓝色圆点代表传感器检测到的目标位置;
刚开始的时候,融合算法创建一个 Track1 对应融合的目标,黄色方框代表不同时刻这个目标的融合后的益状态;
但到了 T1 的时候,Sensor 检测的目标位置和 Track1 中融合的位置差距太大了,所以这个 Track1 已经不能代表当前对象了,所以需要新建立一个 Track2,执行后续的操作;
而 Track1 过时后需要丢弃。
现在来看代码
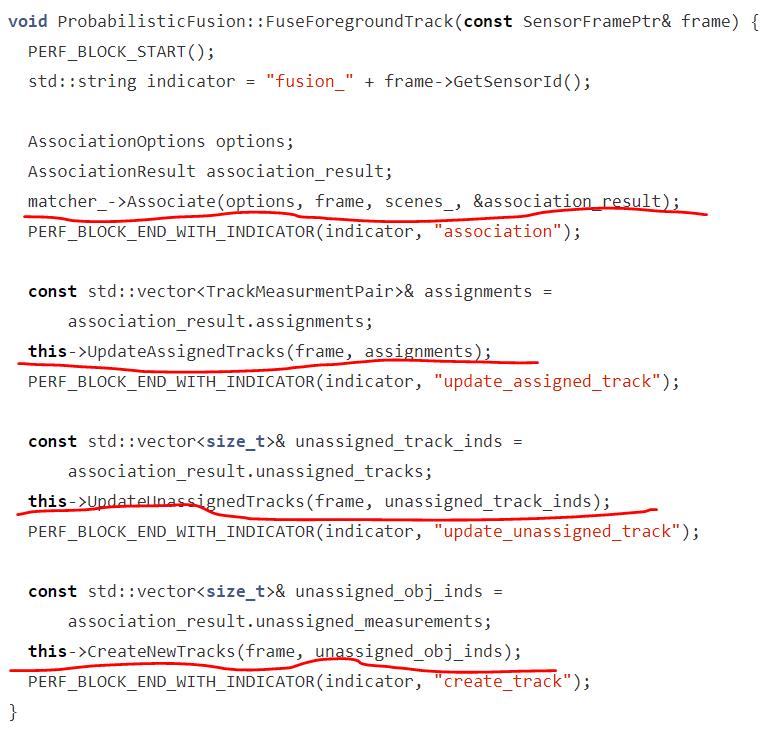
标红的地方基本上可以对应我刚刚陈述的目标跟踪思路:
- 目标之间数据关联
- 更新和新数据匹配上的 Tracks
- 更新未和数据匹配上的 Tracks
- 为未匹配到的新数据创建新的 Tracks
数据关联是目标跟踪中一个重要的领域,经典的算法有 NN、JPDA、HM 等。
Apollo 6.0 中用的是 HM,也就是匈牙利算法。我之前的文章写过这个算法及相应的 demo 代码。
【小算法】二分图匹配之匈牙利算法详解(图例说明,代码亲测可用)
因为 Apollo 是要进行多目标跟踪的,这里就涉及到多目标匹配,匈牙利算法的思路就是将要匹配的两组数据创建一个二分图,对应的到目标跟踪粗略地讲就是新的数据在图的一边,然后历史数组在图的另外一边,所以叫做二分图。

我们假设左边是历史目标,右边是新目标。
红线代表 Match 匹配关系,如果两个节点没有连线就代表没有匹配。
我们为了便于编程,将上图稍作变化。

虚线代表未匹配关系,然后匈牙利算法就是去寻找这么一条路径,路径上保留各个节点之间的匹配关系。
这一过程会耗时较长,本质上是不断进行深度优先比较,遇到冲突时需要进行协调。
具体算法细节请参阅我上面提到的博文。
Apollo 中对应的代码路径是:
modules/perception/fusion/lib/data_association/hm_data_association/hm_tracks_objects_match.cc
其中的 HMTrackersObjectsAssociation::Associate() 中代码过长,下一篇文章我会专门来分析这一段代码。

总之,数据关联最核心的问题其实是距离的计算,合适的距离决定了数据关联的质量。距离不单指物理上的距离,也可以包括用量化的数值对一个目标在类别、外形、颜色的差异化表达。
这一部分细节下一篇文章再讲吧。
后面的对于 background 操作也差不多,就不细讲了。
3.5 CollectFusedObjects()

先通过 gate_keeper 判断能不能将数据发布出去,如果能的话再执行 CollectObjectsByTrack 方法。
相关代码定义在这里:
代码很长,其实就是定义了一些规则,融合后的数据哪些不能发。
1. 不在视野范围内 Lidar、Camera、Radar 数据不能发。
2. 前向 Radar 不能发。
3. 后向雷达目标 Range 要大于指定阈值,速度的 Norm 值要大于 4,Track 概率的置信度要大于阈值。
4. Camera 要发数据的话,要保证是 3d 数据,当然 TrafficCone 也就是锥形桶可以发,其它的类要求比较严格,要保证距离大于阈值,并且在夜晚环境不能发。
决定好哪些 FusedTrack 数据可以发之后,通过 ProbabilisticFusion::CollectObjectsByTrack() 执行最后的操作。
代码比较简单,就是一些简单的赋值动作。
4. 发送结果
Fusion 执行完毕后,将视线跳转到 FusionComponent::Proc() 中来。

将融合后的数据发送出去。
自此,单个周期的数据融合代码流程就分析完毕。
总结
本篇文章只是粗略梳理了 Apollo 6.0 中的感知融合代码,可以得到一个大致的流程框架,这有利于初学者依葫芦画瓢弄一个自己的框架。
但有一点需要明白的是,数据融合是一个系统性的工程问题,依赖于传感器的标定、传感器本身数据的可靠性、数据关联算法、目标跟踪滤波算法、场景的细分处理以及代码的高效实现。
我们可以看到感知融合这一部分 C++ 代码写得比较复杂,运用了大量的设计模式思想,这给同学们阅读代码时增加了难度,建议阅读时多画一下图,脑袋晕乎时休息一下。
最后,接下来的文章将分析核心的数据关联算法、目标跟踪滤波算法的设计与实现。
以上是关于自动驾驶 Apollo 源码分析系列,感知篇:感知融合代码的基本流程的主要内容,如果未能解决你的问题,请参考以下文章