激光IMU融合——LIO-Mapping / LIOM / LINS / LIO-SAM算法解析
Posted Leo-Peng
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了激光IMU融合——LIO-Mapping / LIOM / LINS / LIO-SAM算法解析相关的知识,希望对你有一定的参考价值。
激光IMU融合——LIO-Mapping / LIOM / LINS / LIO-SAM算法解析
激光IMU融合——LIO-Mapping / LIOM / LINS / LIO-SAM算法解析
在激光SLAM领域,LOAM、Lego-LOAM属于纯激光领域,除此之外还衍生处理视觉激光结合、激光IMU结合,甚至三者结合的算法,视觉激光结合的算法在我之前写的博文视觉激光融合——VLOAM / LIMO算法解析中有简单总结,本文所介绍的LIO-Mapping / LIOM / LINS / LIO-SAM算法就隶属于激光IMU结合的算法,在发展成熟度上面是要优于视觉激光融合的。
因为我是先学习的视觉SLAM算法,从整体框架上理解,LIOM、LINS类似于MSCKF,后端是基于滤波的方法实现两种传感器的紧耦合,而LIO-Mapping类似于VINS-Mono,后端是基于优化的方法实现两种传感器的紧耦合,LIO-SAM后端是基于因子图实现的多种传感器的紧耦合,对MSCKF和VINS-Mono不了解的同学可以如下参考博客:
VINS-Mono关键知识点总结——前端详解
VINS-Mono关键知识点总结——边缘化marginalization理论和代码详解
VINS-Mono关键知识点总结——预积分和后端优化IMU部分
学习MSCKF笔记——前端、图像金字塔光流、Two Point Ransac
学习MSCKF笔记——四元数基础
学习MSCKF笔记——真实状态、标称状态、误差状态
学习MSCKF笔记——后端、状态预测、状态扩增、状态更新
本篇博客,我对以上算法进行简单总结。
1. LIO-Mapping
LIO-Mapping是2019年发表于ICRA一篇论文,原论文为《Tightly Coupled 3D Lidar Inertial Odometry and Mapping》,从工程层面上将,就是LOAM和VINS-Mono的结合,具体介绍如下:
1.1 总体框架
LIO-Mapping总体框架如下:
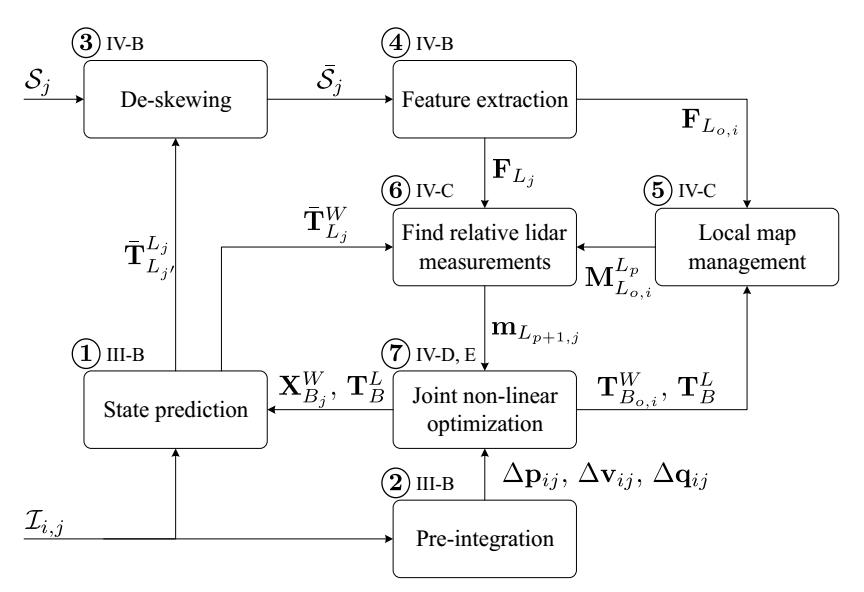
具体步骤如下:
- 在激光雷达数据 S j S_j Sj到来之前,IMU原始输入 I i , j \\mathcalI_i, j Ii,j进行积分(State prediction)和预积分(Pre-intergration),积分的目的是为了获得我们需要估计的状态变量 p B i W \\mathbfp_B_i^W pBiW, v B i W \\mathbfv_B_i^W vBiW和 q B i W \\mathbfq_B_i^W qBiW,而预积分的目的是为了获得用于联合优化的 Δ p i j \\Delta \\mathbfp_i j Δpij, Δ v i j \\Delta \\mathbfv_i j Δvij和 Δ q i j \\Delta \\mathbfq_i j Δqij;
- 当系统收到借光雷达数据 S j S_j Sj后,对激光雷达进行去畸变操作(De-skewing)获得去畸变点云 S j S_j Sj,然后在此基础上对去畸变点云提取激光雷达特征点 F L j \\mathbfF_L_j FLj(Feature extraction);
- 在滑动窗口内的激光雷达特征 F L o , i \\mathbfF_L_o, i FLo,i根据优化后的位姿 T B o , i W \\mathbfT_B_o, i^W TBo,iW和 T B L \\mathbfT_B^L TBL组成局部地图 M L o , i L p \\mathbfM_L_o, i^L_p MLo,iLp(Local map management),根据预测的位姿实现当前帧激光特征点和局部地图的匹配(FInd relative lidar measurements);
- 最后就是j激光雷达观测 m L p + 1 , j \\mathbfm_L_p+1, j mLp+1,j以及预积分结果 Δ p i j \\Delta \\mathbfp_i j Δpij, Δ v i j \\Delta \\mathbfv_i j Δvij和 Δ q i j \\Delta \\mathbfq_i j Δqij实现联合优化,优化后的结果用于跟新IMU积分获得的状态变量,避免IMU漂移;
由于激光雷达去畸变及特征提取、预积分、边缘化等操作在VINS-Mono的相关博客中都有详细介绍,因此本篇博客只对LIO-Mapping中较为特殊的滑窗管理和地图注册进行总结
1.2 滑窗管理
LIO-Mapping中滑窗管理示意图如下:
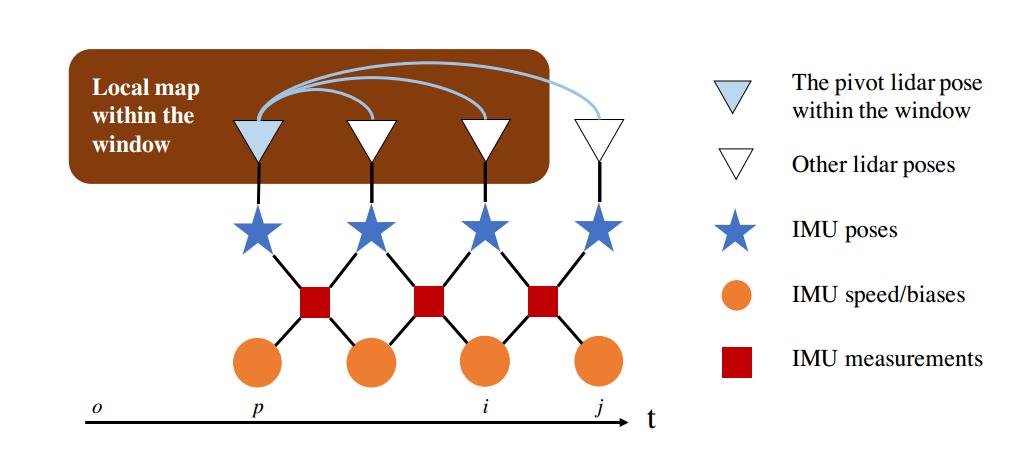
其中,
o
o
o是滑窗中的第一帧Lidar Sweep,
i
i
i是滑窗中最后一帧Lidar Sweep,
j
j
j是当前帧的Lidar Sweep,
p
p
p是滑窗中的Pivot Lidar Sweep,所谓Pivot Lidar Sweep指的就是整个滑窗内帧的位姿都是基于该帧坐标系建立的,随着滑窗移动,Pivot Lidar Sweep也不断变化。
我们将滑窗内的特征点构建为局部地图 M L o , i L p = F L γ L p , γ ∈ o , … , i \\mathbfM_L_o, i^L_p = \\mathbfF_L_\\gamma^L_p, \\gamma \\in\\o, \\ldots, i\\ MLo,iLp=FLγLp,γ∈o,…,i,然后我们通过KNN算法找到原始特征点 F L α , α ∈ p + 1 , … , j \\mathbfF_L_\\alpha, \\alpha \\in\\p+1, \\ldots, j\\ FLα,α∈p+1,…,j与局部地图的对应关系并构建点到面的残差,优化过程中会优化窗口中所有帧相对Pivot Lidar Sweep的相对位姿以 T L p W \\mathbfT_L_p^W TLpW及包括Pivot Lidar Sweep的位姿 T L p W \\mathbfT_L_p^W TLpW,而其中相对位姿可以表示为: T L α L p = T B L T B p W − 1 T B α W T B L − 1 = [ R L α L p p L α L p 0 1 ] \\mathbfT_L_\\alpha^L_p=\\mathbfT_B^L \\mathbfT_B_p^W ^-1 \\mathbfT_B_\\alpha^W \\mathbfT_B^L-1=\\left[\\beginarraycc \\mathbfR_L_\\alpha^L_p & \\mathbfp_L_\\alpha^L_p \\\\ \\mathbf0 & 1 \\endarray\\right] TLαLp=TBLTBpW−1TBαWTBL−1=[RLαLp