pi/4QPSK调制解调原理
Posted 爱吃蛋挞的Dolly
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了pi/4QPSK调制解调原理相关的知识,希望对你有一定的参考价值。
文章目录
1. π / 4 \\pi/4 π/4QPSK 信号的调制原理
减小相位突变量的QPSK由偏置键控QPSK(OK-QPSK)和 π / 4 \\pi/4 π/4偏置的QPSK( π / 4 \\pi/4 π/4QPSK)。由于 π / 4 \\pi/4 π/4QPSK是用差分相位编码产生的(因此也叫做 π / 4 \\pi/4 π/4DQPSK),能有效地进行差分解调和鉴频器解调,在一些不易提取相干载波的场合很有用。
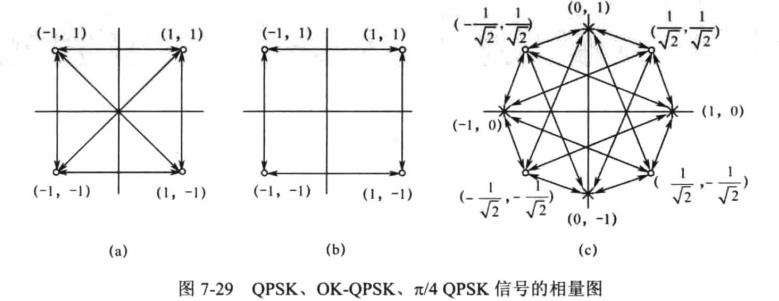
在常规的QPSK中,输入数据经过串/并变换后,分成同相(I)支路和正交(Q)支路,两路数据分别对两个正交载波进行BPSK调制,然后相加合成输出信号,其相位每间隔 T s = 2 T b T_s=2T_b Ts=2Tb可能跳变一次,每次跳变相位有四种可能的取值,即 ± π / 2 \\pm \\pi/2 ±π/2和 ± π \\pm \\pi ±π,如7-29(a)所示。
OK-QPSK和QPSK不同的地方是经过串/并变换分成的两路数据,要相互错开(偏置)一个比特 T b T_b Tb,再进行正交解调,以合成输入信号。此输出信号的相位每间隔 T b T_b Tb可能跳变一次,但由于两路信号的相位变化不会同时发生,因而合成信号的相位变化限于 ± π / 2 \\pm \\pi/2 ±π/2,如图7-29(b)所示,这说明OK-QPSK不存在 ± π \\pm \\pi ±π的相位跳变。
π
/
4
\\pi/4
π/4QPSK也是在QPSK的基础上发展起来的,不同的地方是这里把信号的相位平面平分成间隔为
π
/
4
\\pi/4
π/4的八种相位,八种相位又相间地分成两个相位组,如图7-29(c)所示。图中,带符号“x”的相位点为一组,带符号“°”的相位为另一组。规定
π
/
4
\\pi/4
π/4QPSK信号的相位每隔
T
s
=
2
T
b
T_s=2T_b
Ts=2Tb秒必须从一个组跳变到另一个组。如果当前码元的信号相位等于“x”组4个相位中的一个,那么,下一码元的信号相位只能变成“°”组4个相位中的一个,反之也是一样。这说明,图7-29(c)中,符号不同的相位分别构成一个QPSK相量图,只是二者在相位上错开一个相角
π
/
4
\\pi/4
π/4,这是为什么把这种调制方式称为
π
/
4
\\pi/4
π/4偏置QPSK的原因。由图7-29©可以看出,在相邻码元之间,信号相位的跳变量共有4种,即
±
π
/
4
\\pm \\pi/4
±π/4和
±
3
π
/
4
\\pm 3\\pi/4
±3π/4,不会出现
±
π
\\pm \\pi
±π的相位跳变。
π
/
4
\\pi/4
π/4QPSK信号虽然不存在
±
π
\\pm\\pi
±π的相位跳变,但其功率谱的旁瓣如果不进行抑制,其带外辐射电平仍不能达到要求。工程上对窄带数字调制信号的要求是:在频偏
Δ
f
\\Delta f
Δf等于传输速率
1
/
T
b
1/T_b
1/Tb时,即归一化频偏
Δ
f
T
b
=
1
\\Delta fT_b=1
ΔfTb=1时,功率谱密度要衰减到-60dB以下。为此,在调制前,需要用滤波器对基带信号进行预处理。但是预调制滤波器的带限作用通常要给已调信号带来程度不同的包络起伏,因此,与其他调制方式一样,
π
/
4
\\pi/4
π/4QPSK在调制后的功率放大器还必须采取措施(如负反馈技术),以扩大其动态范围,从而减小已调信号在其中发生的频谱扩散。
π
/
4
\\pi/4
π/4QPSK不属于恒包络数字调制,它所以能提高信号的频带利用率是进行综合处理的结果。
π
/
4
\\pi/4
π/4QPSK信号的表示式可以写成
s
k
(
t
)
=
c
o
s
(
ω
c
t
+
φ
k
)
=
c
o
s
φ
k
c
o
s
ω
c
t
−
s
i
n
φ
k
s
i
n
ω
c
t
=
c
o
s
(
φ
k
−
1
+
Δ
φ
k
)
c
o
s
ω
c
t
−
s
i
n
(
φ
k
−
1
+
Δ
φ
k
)
s
i
n
ω
c
t
s_k(t)=cos(\\omega_ct+\\varphi _k)=cos\\varphi _kcos\\omega_ct-sin\\varphi _ksin\\omega_ct=cos(\\varphi _k-1+\\Delta \\varphi _k)cos\\omega_ct-sin(\\varphi _k-1+\\Delta \\varphi _k)sin\\omega_ct
sk(t)=cos(ωct+φk)=cosφkcosωct−sinφksinωct=cos(φk−1+Δφk)cosωct−sin(φk−1+Δφk)sinωct
式中,
Δ
φ
k
\\Delta \\varphi _k
Δφk是当前码元信号相位
φ
k
\\varphi _k
φk与前一码元相位
φ
k
−
1
\\varphi _k-1
φk−1之差。所谓差分相位编码,就是利用信号的相位差
Δ
φ
k
\\Delta \\varphi _k
Δφk来携带所需传输的信息。对于
π
/
4
\\pi/4
π/4QPSK信号来讲,对应当前码元数据取值,
Δ
φ
k
\\Delta \\varphi _k
Δφk的取值范围为
±
π
/
4
、
±
3
π
/
4
\\pm\\pi/4、\\pm3\\pi/4
±π/4、±3π/4四种取值,其编码规则为:AB=00对应
π
/
4
\\pi/4
π/4相位,AB=01对应
3
π
/
4
3\\pi/4
3π/4相位,AB=11对应
−
3
π
/
4
-3\\pi/4
−3π/4相位,AB=00对应
−
π
/
4
-\\pi/4
−π/4相位。
显然,假设信号的初始相位为0,则当前码元的相位
φ
k
\\varphi _k
φk可能有
0
、
π
、
±
π
/
2
、
±
π
/
4
、
±
3
π
/
4
0、\\pi、\\pm\\pi/2、\\pm\\pi/4、\\pm3\\pi/4
0、π、±π/2、±π/4、±3π/4这八种相位位置,如图7-29©所示,我们令
X
k
=
c
o
s
(
φ
k
−
1
+
Δ
φ
k
)
,
Y
k
=
s
i
n
(
φ
k
−
1
+
Δ
φ
k
)
X_k=cos(\\varphi_k-1+\\Delta\\varphi_k),Y_k=sin(\\varphi_k-1+\\Delta\\varphi_k)
Xk=cos(φk−1+Δφk),Yk=sin(φk−1+Δφk)
则有
X
k
=
c
o
s
(
φ
k
−
1
)
c
o
s
Δ
φ
k
−
s
i
n
(
φ
k
−
1
)
s
i
n
Δ
φ
k
=
X
k
−
1
c
o
s
Δ
φ
k
−
Y
k
−
1
s
i
n
Δ
φ
k
X_k=cos(\\varphi_k-1)cos\\Delta\\varphi_k-sin(\\varphi_k-1)sin\\Delta\\varphi_k=X_k-1cos\\Delta\\varphi_k-Y_k-1sin\\Delta\\varphi_k
Xk=cos(φk−1)cosΔφ以上是关于pi/4QPSK调制解调原理的主要内容,如果未能解决你的问题,请参考以下文章