FPGA的学习:红外遥控
Posted 石小舟
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了FPGA的学习:红外遥控相关的知识,希望对你有一定的参考价值。
使用 FPGA 开发板配套的红外遥控器发送红外信号, FPGA 开发板上的一
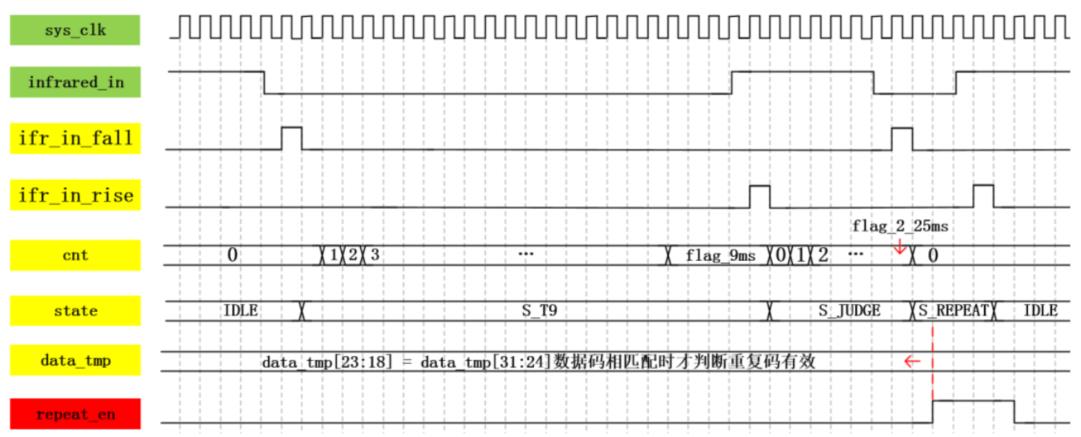
体化接收头接收到红外信号后传入 FPGA 芯片内, FPGA 芯片接收到信号后进行解码,将解码后的按键码显示在数码管上。若检测到发送了重复码,则让 led 闪烁显示,一个重复码闪烁一次。


来看红外接收模块:






`timescale 1ns/1ns
module infrared_rcv
(
input wire sys_clk , //系统时钟,频率50MHz
input wire sys_rst_n , //复位信号,低有效
input wire infrared_in , //红外接受信号
output reg repeat_en , //重复码使能信号
output reg [19:0] data //接收的控制码
);
//parameter define
parameter CNT_0_56MS_L = 20000 , //0.56ms计数为0-27999
CNT_0_56MS_H = 35000 ,
CNT_1_69MS_L = 80000 , //1.69ms计数为0-84499
CNT_1_69MS_H = 90000 ,
CNT_2_25MS_L = 100000, //2.25ms计数为0-112499
CNT_2_25MS_H = 125000,
CNT_4_5MS_L = 175000, //4.5ms计数为0-224999
CNT_4_5MS_H = 275000,
CNT_9MS_L = 400000, //9ms计数为0-449999
CNT_9MS_H = 490000;
//state
parameter IDLE = 5'b0_0001, //空闲状态
S_T9 = 5'b0_0010, //监测同步码低电平
S_JUDGE = 5'b0_0100, //判断重复码和同步码高电平
S_IFR_DATA = 5'b0_1000, //接收数据
S_REPEAT = 5'b1_0000; //重复码
//wire define
wire ifr_in_rise ; //检测红外信号的上升沿
wire ifr_in_fall ; //检测红外信号的下降沿
//reg define
reg infrared_in_d1 ; //对infrared_in信号打一拍
reg infrared_in_d2 ; //对infrared_in信号打两拍
reg [18:0] cnt ; //计数器
reg flag_0_56ms ; //0.56ms计数完成标志信号
reg flag_1_69ms ; //1.69ms计数完成标志信号
reg flag_2_25ms ; //2.25ms计数完成标志信号
reg flag_4_5ms ; //4.5ms计数完成标志信号
reg flag_9ms ; //0.56ms计数完成标志信号
reg [4:0] state ; //状态机状态
reg [5:0] data_cnt ; //数据计数器
reg [31:0] data_tmp ; //数据寄存器
//检测红外信号的上升沿和下降沿
assign ifr_in_rise = (~infrared_in_d2) & (infrared_in_d1) ;
assign ifr_in_fall = (infrared_in_d2) & (~infrared_in_d1) ;
//对infrared_in信号打拍
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
begin
infrared_in_d1 <= 1'b0;
infrared_in_d2 <= 1'b0;
end
else
begin
infrared_in_d1 <= infrared_in;
infrared_in_d2 <= infrared_in_d1;
end
//cnt
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt <= 19'd0;
else
case(state)
IDLE: cnt <= 19'd0;
S_T9: if((ifr_in_rise==1'b1) && (flag_9ms==1'b1))
cnt <= 19'd0;
else
cnt <= cnt + 1;
S_JUDGE:if((ifr_in_fall==1'b1) && (flag_2_25ms==1'b1 || flag_4_5ms==1'b1))
cnt <= 19'd0;
else
cnt <= cnt + 1;
S_IFR_DATA: if((flag_0_56ms == 1'b1) && (ifr_in_rise==1'b1))
cnt <= 19'd0;
else if(((flag_0_56ms==1'b1) || (flag_1_69ms==1'b1)) && (ifr_in_fall==1'b1))
cnt <= 19'd0;
else
cnt <= cnt + 1;
default:cnt <= 19'd0;
endcase
//flag_0_56ms:计数到0.56ms范围拉高标志信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
flag_0_56ms <= 1'b0;
else if((state == S_IFR_DATA) && (cnt >= CNT_0_56MS_L) && (cnt <= CNT_0_56MS_H))
flag_0_56ms <= 1'b1;
else
flag_0_56ms <= 1'b0;
//flag_1_69ms:计数到1.69ms范围拉高标志信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
flag_1_69ms <= 1'b0;
else if((state == S_IFR_DATA) && (cnt >= CNT_1_69MS_L) && (cnt <= CNT_1_69MS_H))
flag_1_69ms <= 1'b1;
else
flag_1_69ms <= 1'b0;
//flag_2_25ms:计数到2.25ms范围拉高标志信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
flag_2_25ms <= 1'b0;
else if((state == S_JUDGE) && (cnt >= CNT_2_25MS_L) && (cnt <= CNT_2_25MS_H))
flag_2_25ms <= 1'b1;
else
flag_2_25ms <= 1'b0;
//flag_4_5ms:计数到4.5ms范围拉高标志信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
flag_4_5ms <= 1'b0;
else if((state == S_JUDGE) && (cnt >= CNT_4_5MS_L) && (cnt <= CNT_4_5MS_H))
flag_4_5ms <= 1'b1;
else
flag_4_5ms <= 1'b0;
//flag_9ms:计数到9ms范围拉高标志信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
flag_9ms <= 1'b0;
else if((state == S_T9) && (cnt >= CNT_9MS_L) && (cnt <= CNT_9MS_H))
flag_9ms <= 1'b1;
else
flag_9ms <= 1'b0;
//状态机:状态跳转
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
state <= IDLE;
else
case(state)
//若检测到红外信号下降沿到来跳转到S_T9状态
IDLE:
if(ifr_in_fall == 1'b1)
state <= S_T9;
else //若没检测到红外信号的下降沿,则让其保持在IDLE状态
state <= IDLE;
S_T9: //若检测到红外信号上升沿到来,则判断flag_9ms是否为1
//若检测到时间接近9ms,则跳转到S_judje状态
if((ifr_in_rise == 1'b1) && (flag_9ms == 1'b1))
state <= S_JUDGE;
else if((ifr_in_rise == 1'b1) && (flag_9ms == 1'b0))
state <= IDLE;
else
state <= S_T9;
S_JUDGE: //若检测到红外信号下降沿到来,则判断flag_2_25ms是否为1
//若检测到时间接近2.25ms,则跳转重复码状态
if((ifr_in_fall == 1'b1) && (flag_2_25ms == 1'b1))
state <= S_REPEAT;
else if((ifr_in_fall == 1'b1) && (flag_4_5ms == 1'b1))
state <= S_IFR_DATA;
else if((ifr_in_fall == 1'b1) && (flag_2_25ms == 1'b0) && (flag_4_5ms == 1'b0))
state <= IDLE;
else
state <= S_JUDGE;
S_IFR_DATA:
//若上升沿到来,低电平保持时间不满足编码协议,则回到空闲状态
if(ifr_in_rise == 1'b1 && flag_0_56ms == 1'b0)
state <= IDLE;
//若下降沿到来,高电平保持时间不满足编码0或1,则回到空闲状态
else if(ifr_in_fall == 1'b1 && (flag_0_56ms == 1'b0 &&
flag_1_69ms == 1'b0))
state <= IDLE;
//数据接收完毕之后回到空闲状态,等待下一个指令的到来
else if(ifr_in_rise == 1'b1 && data_cnt == 6'd32)
state <= IDLE;
S_REPEAT:
/*若上升沿到来,无论时间是否到了0.56ms,
状态机都跳回IDLE状态等待下一数据码或重复码的到来*/
if(ifr_in_rise == 1'b1)
state <= IDLE;
else
state <= S_REPEAT;
default:
state <= IDLE;
endcase
//data_tmp
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
data_tmp <= 32'b0;
else if(state == S_IFR_DATA && ifr_in_fall == 1'b1 &&
flag_0_56ms == 1'b1)
data_tmp[data_cnt] <= 1'b0;
else if(state == S_IFR_DATA && ifr_in_fall == 1'b1 &&
flag_1_69ms == 1'b1)
data_tmp[data_cnt] <= 1'b1;
else
data_tmp <= data_tmp;
//data_cnt
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
data_cnt <= 1'b0;
else if(ifr_in_rise == 1'b1 && data_cnt == 6'd32)
data_cnt <= 1'b0;
else if(ifr_in_fall == 1'b1 && state == S_IFR_DATA)
data_cnt <= data_cnt + 1'b1;
else
data_cnt <= data_cnt;
//repeat_en
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
repeat_en <= 1'b0;
else if(state == S_REPEAT && (data_tmp[23:16] ==
~data_tmp[31:24]))
repeat_en <= 1'b1;
else
repeat_en <= 1'b0;
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
data <= 20'b0;
//数据接收完之后若数据校验正确,则输出数据码的数据
else if(data_tmp[23:16] == ~data_tmp[31:24] && data_tmp[7:0] ==
~data_tmp [15:8] && data_cnt==6'd32)
data <= 12'b0,data_tmp[23:16];
endmodule
接着是LED控制模块


`timescale 1ns/1ns
module led_ctrl
(
input wire sys_clk , //系统时钟,频率50MHz
input wire sys_rst_n , //复位信号,低有效
input wire repeat_en , //重复码使能信号
output reg led //输出led灯信号
);
//parameter define
parameter CNT_MAX = 2500_000;
//wire define
wire repeat_en_rise ; //重复码使能信号上升沿
//reg define
reg repeat_en_d1; //重复码使能信号打一拍
reg repeat_en_d2; //重复码使能信号打两拍
reg cnt_en ; //计数器使能信号
reg [21:0] cnt ; //计数器
//获得repeat_en上升沿信号
assign repeat_en_rise = repeat_en_d1 & ~repeat_en_d2;
//对reeat_en打两拍
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
begin
repeat_en_d1 <= 1'b0;
repeat_en_d2 <= 1'b0;
end
else
begin
repeat_en_d1 <= repeat_en;
repeat_en_d2 <= repeat_en_d1;
end
//当重复码使能信号上升沿来到,拉高计数器使能信号,计到50ms后拉低
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt_en <= 1'b0;
else if(cnt == CNT_MAX - 1)
cnt_en <= 1'b0;
else if(repeat_en_rise == 1'b1)
cnt_en <= 1'b1;
//当计数器使能信号为高时让计数器开始计数,为低时计数器清零
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt <= 22'b0;
else if(cnt_en == 1'b1)
cnt <= cnt + 1;
else
cnt <= 22'b0;
//当计数器大于0时,点亮led灯,也就是当使能信号到来,led灯会亮50ms
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
led <= 1'b1;
else if(cnt > 0)
led <= 1'b0;
else
led <= 1'b1;
endmodule
最后得到RTL视图。

然后进行仿真验证。
`timescale 1ns/1ns
module tb_top_infrared_rcv();
//wire define
wire led ;
wire stcp ;
wire shcp ;
wire ds ;
wire oe ;
//reg define
reg sys_clk ;
reg sys_rst_n ;
reg infrared_in ;
//对sys_clk,sys_rst_n,infrared_in赋值
initial
begin
sys_clk = 1'b1;
sys_rst_n <= 1'b0;
infrared_in <= 1'b1;
#100
sys_rst_n <= 1'b1;
//引导码
#1000
infrared_in <= 1'b0; #9000000
infrared_in <= 1'b1; #4500000
//地址码(发送地址码8’h99)
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//地址反码(地址反码为8’h66)
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据码(发送数据码8’h22)
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据反码(数据反码为8’hdd)
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据0
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #560000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//数据1
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #1690000
//重复码
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1; #42000000
infrared_in <= 1'b0; #9000000
infrared_in <= 1'b1; #2250000
infrared_in <= 1'b0; #560000
infrared_in <= 1'b1;
end
//clk:产生时钟
always #10 sys_clk <= ~sys_clk;
top_infrared_rcv top_infrared_rcv_inst
(
.sys_clk (sys_clk ), //系统时钟,频率50MHz
.sys_rst_n (sys_rst_n ), //复位信号,低电平有效
.infrared_in (infrared_in), //红外接收信号
.stcp (stcp ), //输出数据存储寄时钟
.shcp (shcp ), //移位寄存器的时钟输入
.ds (ds ), //串行数据输入
.oe (oe ), //输出使能信号
.led (led ) //led灯控制信号
);
endmodule
以上是关于FPGA的学习:红外遥控的主要内容,如果未能解决你的问题,请参考以下文章