Linux驱动实践:如何编写 GPIO 设备的驱动程序?
Posted IOT物联网小镇
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Linux驱动实践:如何编写 GPIO 设备的驱动程序?相关的知识,希望对你有一定的参考价值。
作 者:道哥,10+年嵌入式开发老兵,专注于:C/C++、嵌入式、Linux。
关注下方公众号,回复【书籍】,获取 Linux、嵌入式领域经典书籍;回复【PDF】,获取所有原创文章( PDF 格式)。
文章目录
别人的经验,我们的阶梯!
大家好,我是道哥。
在前几篇文章中,我们一块讨论了:在 Linux 系统中,编写字符设备驱动程序的基本框架,主要是从代码流程和 API 函数这两方面触发。
这篇文章,我们就以此为基础,写一个有实际应用功能的驱动程序:
在驱动程序中,初始化 GPIO 设备,自动创建设备节点;
在应用程序中,打开 GPIO 设备,并发送控制指令设置 GPIO 口的状态;
示例程序目标
编写一个驱动程序模块:mygpio.ko。
当这个驱动模块被加载的时候,在系统中创建一个 mygpio 类设备,并且在 /dev 目录下,创建 4 个设备节点:
/dev/mygpio0
/dev/mygpio1
/dev/mygpio2
/dev/mygpio3
因为我们现在是在 x86 平台上来模拟 GPIO 的控制操作,并没有实际的 GPIO 硬件设备。
因此,在驱动代码中,与硬件相关部分的代码,使用宏 MYGPIO_HW_ENABLE 控制起来,并且在其中使用printk输出打印信息来体现硬件的操作。
在应用程序中,可以分别打开以上这 4 个 GPIO 设备,并且通过发送控制指令,来设置 GPIO 的状态。
编写驱动程序
以下所有操作的工作目录,都是与上一篇文章相同的,即:
~/tmp/linux-4.15/drivers/。
创建驱动目录和驱动程序
$ cd linux-4.15/drivers/
$ mkdir mygpio_driver
$ cd mygpio_driver
$ touch mygpio.c
mygpio.c 文件的内容如下(不需要手敲,文末有代码下载链接):
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/ctype.h>
#include <linux/device.h>
#include <linux/cdev.h>
// GPIO 硬件相关宏定义
#define MYGPIO_HW_ENABLE
// 设备名称
#define MYGPIO_NAME "mygpio"
// 一共有4个 GPIO 口
#define MYGPIO_NUMBER 4
// 设备类
static struct class *gpio_class;
// 用来保存设备
struct cdev gpio_cdev[MYGPIO_NUMBER];
// 用来保存设备号
int gpio_major = 0;
int gpio_minor = 0;
#ifdef MYGPIO_HW_ENABLE
// 硬件初始化函数,在驱动程序被加载的时候(gpio_driver_init)被调用
static void gpio_hw_init(int gpio)
printk("gpio_hw_init is called: %d. \\n", gpio);
// 硬件释放
static void gpio_hw_release(int gpio)
printk("gpio_hw_release is called: %d. \\n", gpio);
// 设置硬件GPIO的状态,在控制GPIO的时候(gpio_ioctl)被调研
static void gpio_hw_set(unsigned long gpio_no, unsigned int val)
printk("gpio_hw_set is called. gpio_no = %ld, val = %d. \\n", gpio_no, val);
#endif
// 当应用程序打开设备的时候被调用
static int gpio_open(struct inode *inode, struct file *file)
printk("gpio_open is called. \\n");
return 0;
// 当应用程序控制GPIO的时候被调用
static long gpio_ioctl(struct file* file, unsigned int val, unsigned long gpio_no)
printk("gpio_ioctl is called. \\n");
// 检查设置的状态值是否合法
if (0 != val && 1 != val)
printk("val is NOT valid! \\n");
return 0;
// 检查设备范围是否合法
if (gpio_no >= MYGPIO_NUMBER)
printk("dev_no is invalid! \\n");
return 0;
printk("set GPIO: %ld to %d. \\n", gpio_no, val);
#ifdef MYGPIO_HW_ENABLE
// 操作 GPIO 硬件
gpio_hw_set(gpio_no, val);
#endif
return 0;
static const struct file_operations gpio_ops=
.owner = THIS_MODULE,
.open = gpio_open,
.unlocked_ioctl = gpio_ioctl
;
static int __init gpio_driver_init(void)
int i, devno;
dev_t num_dev;
printk("gpio_driver_init is called. \\n");
// 动态申请设备号(严谨点的话,应该检查函数返回值)
alloc_chrdev_region(&num_dev, gpio_minor, MYGPIO_NUMBER, MYGPIO_NAME);
// 获取主设备号
gpio_major = MAJOR(num_dev);
printk("gpio_major = %d. \\n", gpio_major);
// 创建设备类
gpio_class = class_create(THIS_MODULE, MYGPIO_NAME);
// 创建设备节点
for (i = 0; i < MYGPIO_NUMBER; ++i)
// 设备号
devno = MKDEV(gpio_major, gpio_minor + i);
// 初始化 cdev 结构
cdev_init(&gpio_cdev[i], &gpio_ops);
// 注册字符设备
cdev_add(&gpio_cdev[i], devno, 1);
// 创建设备节点
device_create(gpio_class, NULL, devno, NULL, MYGPIO_NAME"%d", i);
#ifdef MYGPIO_HW_ENABLE
// 初始化 GPIO 硬件
for (i = 0; i < MYGPIO_NUMBER; ++i)
gpio_hw_init(i);
#endif
return 0;
static void __exit gpio_driver_exit(void)
int i;
printk("gpio_driver_exit is called. \\n");
// 删除设备和设备节点
for (i = 0; i < MYGPIO_NUMBER; ++i)
cdev_del(&gpio_cdev[i]);
device_destroy(gpio_class, MKDEV(gpio_major, gpio_minor + i));
// 释放设备类
class_destroy(gpio_class);
#ifdef MYGPIO_HW_ENABLE
// 释放 GPIO 硬件
for (i = 0; i < MYGPIO_NUMBER; ++i)
gpio_hw_release(i);
#endif
// 注销设备号
unregister_chrdev_region(MKDEV(gpio_major, gpio_minor), MYGPIO_NUMBER);
MODULE_LICENSE("GPL");
module_init(gpio_driver_init);
module_exit(gpio_driver_exit);
相对于前几篇文章来说,上面的代码稍微有一点点复杂,主要是多了宏定义 MYGPIO_HW_ENABLE 控制部分的代码。
比如:在这个宏定义控制下的三个与硬件相关的函数:
gpio_hw_init()
gpio_hw_release()
gpio_hw_set()
就是与GPIO硬件的初始化、释放、状态设置相关的操作。
代码中的注释已经比较完善了,结合前几篇文章中的函数说明,还是比较容易理解的。
从代码中可以看出:驱动程序使用 alloc_chrdev_region 函数,来动态注册设备号,并且利用了 Linux 应用层中的 udev 服务,自动在 /dev 目录下创建了设备节点。
另外还有一点:在上面示例代码中,对设备的操作函数只实现了 open 和 ioctl 这两个函数,这是根据实际的使用场景来决定的。
这个示例中,只演示了如何控制 GPIO 的状态。
你也可以稍微补充一下,增加一个read函数,来读取某个GPIO口的状态。
控制 GPIO 设备,使用 write 或者 ioctl 函数都可以达到目的,只是 ioctl 更灵活一些。
创建 Makefile 文件
$ touch Makefile
内容如下:
ifneq ($(KERNELRELEASE),)
obj-m := mygpio.o
else
KERNELDIR ?= /lib/modules/$(shell uname -r)/build
PWD := $(shell pwd)
default:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
clean:
$(MAKE) -C $(KERNEL_PATH) M=$(PWD) clean
endif
编译驱动模块
$ make
得到驱动程序: mygpio.ko 。
加载驱动模块
在加载驱动模块之前,先来检查一下系统中,几个与驱动设备相关的地方。
先看一下 /dev 目录下,目前还没有设备节点( /dev/mygpio[0-3] )。
$ ls -l /dev/mygpio*
ls: cannot access '/dev/mygpio*': No such file or directory
再来查看一下 /proc/devices 目录下,也没有 mygpio 设备的设备号。
$ cat /proc/devices
为了方便查看打印信息,把dmesg输出信息清理一下:
$ sudo dmesg -c
现在来加载驱动模块,执行如下指令:
$ sudo insmod mygpio.ko
当驱动程序被加载的时候,通过 module_init( ) 注册的函数 gpio_driver_init() 将会被执行,那么其中的打印信息就会输出。
还是通过 dmesg 指令来查看驱动模块的打印信息:
$ dmesg

可以看到:操作系统为这个设备分配的主设备号是 244,并且也打印了GPIO硬件的初始化函数的调用信息。
此时,驱动模块已经被加载了!
来查看一下 /proc/devices 目录下显示的设备号:
$ cat /proc/devices

设备已经注册了,主设备号是: 244 。
设备节点
由于在驱动程序的初始化函数中,使用 cdev_add 和 device_create 这两个函数,自动创建设备节点。
所以,此时我们在 /dev 目录下,就可以看到下面这4个设备节点:

现在,设备的驱动程序已经加载了,设备节点也被创建好了,应用程序就可以来控制 GPIO 硬件设备了。
应用程序
应用程序仍然放在 ~/tmp/App/ 目录下。
$ mkdir ~/tmp/App/app_mygpio
$ cd ~/tmp/App/app_mygpio
$ touch app_mygpio.c
文件内容如下:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <assert.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#define MY_GPIO_NUMBER 4
// 4个设备节点
char gpio_name[MY_GPIO_NUMBER][16] =
"/dev/mygpio0",
"/dev/mygpio1",
"/dev/mygpio2",
"/dev/mygpio3"
;
int main(int argc, char *argv[])
int fd, gpio_no, val;
// 参数个数检查
if (3 != argc)
printf("Usage: ./app_gpio gpio_no value \\n");
return -1;
gpio_no = atoi(argv[1]);
val = atoi(argv[2]);
// 参数合法性检查
assert(gpio_no < MY_GPIO_NUMBER);
assert(0 == val || 1 == val);
// 打开 GPIO 设备
if((fd = open(gpio_name[gpio_no], O_RDWR | O_NDELAY)) < 0)
printf("%s: open failed! \\n", gpio_name[gpio_no]);
return -1;
printf("%s: open success! \\n", gpio_name[gpio_no]);
// 控制 GPIO 设备状态
ioctl(fd, val, gpio_no);
// 关闭设备
close(fd);
以上代码也不需要过多解释,只要注意参数的顺序即可。
接下来就是编译和测试了:
$ gcc app_mygpio.c -o app_mygpio
执行应用程序的时候,需要携带2个参数:GPIO 设备编号(0 ~ 3),设置的状态值(0 或者 1)。
这里设置一下/dev/mygpio0这个设备,状态设置为1:
$ sudo ./app_mygpio 0 1
[sudo] password for xxx: <输入用户密码>
/dev/mygpio0: open success!
如何确认/dev/mygpio0这个GPIO的状态确实被设置为1了呢?当然是看 dmesg 指令的打印信息:
$ dmesg

通过打印信息可以看到:确实执行了【设置 mygpio0 的状态为 1】的动作。
再继续测试一下:设置 mygpio0 的状态为 0:
$ sudo ./app_mygpio 0 0

当然了,设置其他几个GPIO口的状态,都是可以正确执行的!
卸载驱动模块
卸载指令:
$ sudo rmmod mygpio
此时,/proc/devices 下主设备号 244 的 mygpio 已经不存在了。
再来看一下 dmesg的打印信息:
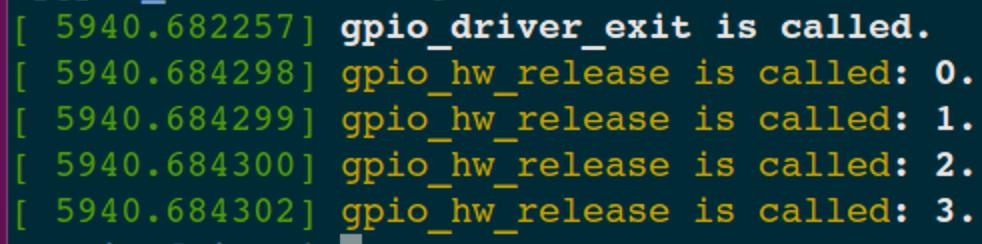
可以看到:驱动程序中的 gpio_driver_exit( ) 被调用执行了。
并且,/dev 目录下的 4 个设备节点,也被函数 device_destroy() 自动删除了!
文中的测试代码,已经放在网盘了。
在公众号【IOT物联网小镇】后台回复关键字:1128,即可获取下载地址。
谢谢!
推荐阅读【2】C语言指针-从底层原理到花式技巧,用图文和代码帮你讲解透彻

以上是关于Linux驱动实践:如何编写 GPIO 设备的驱动程序?的主要内容,如果未能解决你的问题,请参考以下文章