AUTOSAR理解备忘录
Posted 洛神殇
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了AUTOSAR理解备忘录相关的知识,希望对你有一定的参考价值。
AUTOSAR开发技术手册
一、AUTOSAR的定义:
AUTOSAR是AUTOmotive Open System Architecture(汽车开放系统架构)的首字母缩写,由汽车制造商,供应商以及工具开发商联合开发。
二、AUTOSAR的起源:
在2003年的时候,行业内的几大巨头(包括BMW, Bosch, Continental, DaimlerChrysler, Volkswagen, Siemens VDO)联合建立了AUTOSAR联盟,目的是一起开发并建立一套真正的开放的汽车电子电器架构(也就是我们现在所说的AUTOSAR标准或者AUTOSAR架构,我们经常提到的AUTOSAR一般就是指AUTOSAR构架/标准,AUTOSAR的全称是AUTomotive Open System ARchitecture),随着多年的发展,越来越多的行业内的公司加入到了AUTOSAR联盟中,这其中有OEM(汽车整车厂),Tier1(汽车零部件供应商),芯片制造商以及工具制造商,AUTOSAR构架/标准也成为了汽车E/E设计的发展方向。AUTOSAR架构和标准的目标是:
-
满足未来汽车的需求,例如可用性和安全性、软件升级更新需求、可维护性等
-
增加软件的灵活性和可扩展性来实现软件的集成和整合
-
实现商用现成的跨产品线的软件硬件
-
控制产品和流程的复杂度和风险
- 优化成本
三、AUTOSAR架构的主要特点是:
1、模块化和可配置性
定义了一套汽车ECU软件构架,将不依赖硬件的软件模块和依赖硬件的软件模块分别优雅的封装起来,从而可以让ECU可以集成由不同供应商提供的软件模块,增加了功能的重用性,提高了软件质量。软件可以根据不同的ECU功能需求和资源情况进行灵活配置。
2、有标准化接口
定义了一系列的标准API来实现软件的分层化。
3、提出了RTE的概念
RTE全称是Runtime Environment,采用RTE实现了ECU内部和ECU之间的节点通讯,RTE处于功能软件模块和基础软件模块之间,使得软件集成更加容易。
4、具有标准的测试规范
针对功能和通讯总线制定了标准的测试规范,测是规范涵盖的范围包括对于AUTOSAR的应用兼容性(例如RTE的需求,软件服务行为需求和库等)和总线兼容性(总线处理行为和总线协议等),它的目标是建立标准的测试规范从而减少测试工作量和成本。
四、AUTOSAR体系架构分层标准


五、Autosar架构解读
1、Application Layer(应用层)

应用层中的功能由各软件组件SWC(software component)实现,组件中封装了部分或者全部汽车电子功能,包括对其具体功能的实现以及对应描述,如控制大灯,空调等部件的运作,但与汽车硬件系统没有连接。
1) 软件组件SWC(software component)
软件组件SWC(software component)是由Atomic component最小逻辑单元组成。Atomic component最小逻辑单元有Application、Sensor/actuator两种类型。其中Application是算法实现类型,能在各ECU上自由映射;Sensor/actuator是为Application提供I/O端口类型,用于与ECU绑定,但不可像Application那样能在各ECU上自由映射。数个SWC的逻辑集合组合成Composition。图2是SWC组成实例。

图 2
2)端口Ports
端口Ports是用来和其他SWC通信。通信内容分为Data elements与operations。其中,Data elements用Sender/Receiver通信方式;operations用Client/Server通信方式。图3是通信方式

图3
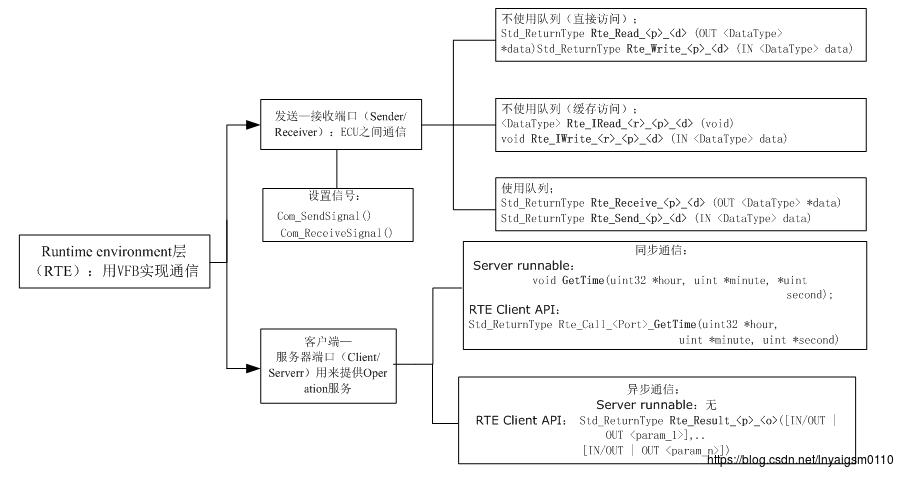
发送—接收端口(Sender/Receiver)用来传输数据,具有一个通信端口可以包含多种数据类型特点。但如果一个数据类型要通过总线传输,那么它必须与一个信号对应起来,数据类型既可以是简单的数据类型(integer, float),也可以是复杂类型(array, record)。通信方式:1:n或n:1。

图 4
客户端—服务器端口(Client/Serverr)用来提供Operation服务,具有一个客户端—服务器端口可以包含多种Operation和同步或是异步通信特点,一个客户端—服务器端口可以包含多种Operations操作,Operations操作也可被单个调用。通信方式:1:n或n:1。

图 5
3)可运行实体(Runnables entities)
可运行实体(Runnablesentities),简称Runnables。可运行实体包含实际实现的函数,可以是具体的逻辑算法或是实际操作。可运行实体由RTE周期性或是事件触发调用,如当接收到数据。

图 6
2、Runtime environment层 (RTE)
中间件部分给应用层提供了通信手段,这里的通信是一种广义的通讯,可以理解成接口,应用层与其他软件体的信息交互有两种,第一种是应用层中的不同模块之间的信息交互;第二种是应用层模块同基础软件之间的信息交互。而RTE就是这些交互使用的接口的集散地,它汇总了所有需要和软件体外部交互的接口。从某种意义上来看,设计符合AUTOSAR的系统其实就是设计RTE。
SW-C之间的通信是调用RTE API函数而非直接实现的,都在RTE的管理和控制之下。每个API遵循统一的命名规则且只和软件组件自身的描述有关。具体通信实现取决于系统设计和配置,都由工具供应商提供的RTE Generator自动生成的。
在设计开发阶段中,软件组件通信层面引入了一个新的概念,虚拟功能总线VFB(Virtual Functional Bus)。它是对AUTOSAR所有通信机制的抽象,利用VFB,开发工程师将软件组件的通信细节抽象,只需要通过AUTOSAR所定义的接口进行描述,即能够实现软件组件与其他组件以及硬件之间的通信,甚至ECU内部或者是与其他ECU之间的数据传输。

图 7
从图中可以看到,有三种接口描述,我们先从定义的角度来看这三种接口有什么不同。
1. StandardizedInterface(标准接口):标准接口是在AUTOSAR标准中被标准化的接口,但是并没有使用AUTOSAR接口技术,标准接口通常被用在某个ECU内部的软件模块之间的通讯,不能用于网络通讯。
2. StandardizedAUTOSAR Interface(标准AUTOSAR接口):标准AUTOSAR接口是在AUTOSAR标准中使用AUTOSAR接口技术标准化的接口,这样的接口的语法和语义都被规定好了,这样的接口通常使用在AUTOSAR服务中,这样的接口是基础软件服务提供给应用程序的。
3. AUTOSARInterface(AUTOSAR接口):AUTOSAR接口定义了软件模块和BSW模块(仅仅是IO抽象和复杂驱动)之间交互的方式,AUTOSAR接口是以port的形式出现的,AUTOSAR将ECU内部的通讯和网络通讯使用的接口进行了统一。
从上边的定义中我们可以看出不同的接口使用的场景不同,及不同的模块交互会使用到不同的接口。除了将接口归类以外,这样定义究竟有什么实际的意义呢?从实际使用的角度来看,第一和第二类接口都是语法语义标准化的接口,即接口函数的数量、函数的名字、函数参数名字及数量、函数的功能、函数的返回值都已经在标准里边定义好了。不同的公司的软件在实施这些接口的时候虽然内容算法不同,但是它们长相和功能是一致的,接口定义在AUTOSAR规范文档里边是可以查得到的。第三类接口呢,AUTOSAR仅仅规定了简单的命名规则,这类接口高度的和应用相关,比如BCU控制大灯打开的接口可以是Rte_Call_RPort_BeamLight_SetDigOut也可以是Rte_Call_RPort_HeaderLight_Output,公司可以自己定义,又比如仪表想要从CAN总线上获得车速,改接口可以是Rte_IRead_RE_Test_RPort_Speed_uint8也可以是Rte_IRead_Test_RE_RPort_Spd_uint8,这些接口必须通过RTE交互。

图 8
3、Basic software层(BSW)

虽然汽车中有各种不同的ECU,它们具有各种各样的功能,但是实现这些功能所需要的基础服务是可以抽象出来的,比如IO操作,AD操作,诊断,CAN通讯,操作系统等,无非就是不同的ECU功能,所操作的IO、AD代表不同的含义,所接收发送的CAN消息代表不同的含义,操作系统调度的任务周期优先级不同。这些可以被抽象出来的基础服务被称为基础软件。根据不同的功能对基础软件继续可以细分成四部分,分别为服务层(Service Layer),ECU抽象层(ECUAbstract Layer),复杂驱动(ComplexDriver)和MCAL(Microcontroller Abstraction Layer),四部分之间的互相依赖程度不尽相同。
• 服务层(Service Layer),这一层基础软件提供了汽车ECU非应用相关的服务,包括OS,网络通讯,内存管理(NVRAM),诊断(UDS,故障管理等),ECU状态管理模块等,它们对ECU的应用层功能提供辅助支持,这一层软件在不同领域的ECU中也非常相似,例如不同的ECU中的OS的任务周期和优先级不同,不同的ECU中的NVRAM的分区不同,存储的内容不同。
• ECU抽象层(ECU Abstract Layer),这一层软件提供了ECU应用相关的服务,它是对一个ECU的抽象,它包括了所有的ECU的输入输出,比如AD,DIO,PWM等,这一层软件直接实现了ECU的应用层功能,可以读取传感器状态,可以控制执行器输出,不同领域的ECU会有很大的不同。
• MCAL(Microcontroller Abstraction Layer),这一层软件是对ECU所使用的主控芯片的抽象,它跟芯片的实现紧密相关,是ECU软件的最底层部分,直接和主控芯片及外设芯片进行交互,它的作用是将芯片提供的功能抽象成接口,然后把这些接口提供给上边的服务层/ECU抽象层使用。
• 复杂驱动(Complex Drivers),汽车ECU中有一些领域的ECU会处理相当复杂的硬件信号,执行相当复杂的硬件动作,例如发动机控制,ABS等,这些功能相关的软件很难抽象出来适用于所有的汽车ECU,它是跟ECU的应用以及ECU所使用的硬件紧密相关的,属于AUTOSAR构架中在不同的ECU上无法移植的部分。

图 9
图10是BSW层中各个子模块说明。
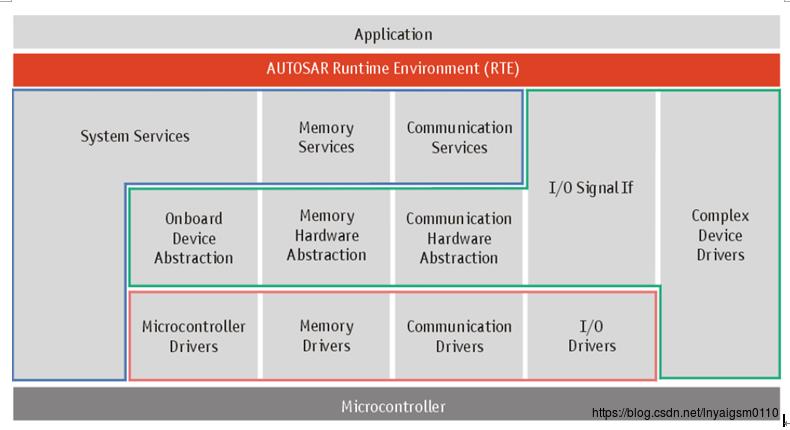
图 10
4、Microcontroller层
底层驱动层是由芯片生产厂家提供。
参考自此处。
以上是关于AUTOSAR理解备忘录的主要内容,如果未能解决你的问题,请参考以下文章