mmaction2 入门教程 03评价指标可视化 mAP每类行为的ap值每类行为的数量
Posted CV-杨帆
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了mmaction2 入门教程 03评价指标可视化 mAP每类行为的ap值每类行为的数量相关的知识,希望对你有一定的参考价值。
目录
0 前言
训练测试后,我们会拿到很多评价数据,为了更好地分析数据,分析每类行为的预测结果,我们需要将结果可视化。
需要的评价指标:mAP、每类行为的ap值、每类行为的数量、训练过程的precision、recall、loss值的变化。
GPU平台:https://cloud.videojj.com/auth/register?inviter=18452&activityChannel=student_invite
b站:https://www.bilibili.com/video/BV1dG411t7GR
1 修改object_detection_evaluation.py
对object_detection_evaluation.py文件进行修改
https://github.com/open-mmlab/mmaction2/blob/master/mmaction/core/evaluation/ava_evaluation/object_detection_evaluation.py
主要是将我们所需要的值(mAP、每类行为的ap值、每类行为的数量)存起来
1.1 修改代码
全部代码如下:
# Copyright 2017 The TensorFlow Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# =============================================================================
"""object_detection_evaluation module.
ObjectDetectionEvaluation is a class which manages ground truth information of
a object detection dataset, and computes frequently used detection metrics such
as Precision, Recall, CorLoc of the provided detection results.
It supports the following operations:
1) Add ground truth information of images sequentially.
2) Add detection result of images sequentially.
3) Evaluate detection metrics on already inserted detection results.
4) Write evaluation result into a pickle file for future processing or
visualization.
Note: This module operates on numpy boxes and box lists.
"""
import collections
import logging
import warnings
from abc import ABCMeta, abstractmethod
from collections import defaultdict
import numpy as np
from . import metrics, per_image_evaluation, standard_fields
class DetectionEvaluator:
"""Interface for object detection evaluation classes.
Example usage of the Evaluator:
------------------------------
evaluator = DetectionEvaluator(categories)
# Detections and groundtruth for image 1.
evaluator.add_single_groundtruth_image_info(...)
evaluator.add_single_detected_image_info(...)
# Detections and groundtruth for image 2.
evaluator.add_single_groundtruth_image_info(...)
evaluator.add_single_detected_image_info(...)
metrics_dict = evaluator.evaluate()
"""
__metaclass__ = ABCMeta
def __init__(self, categories):
"""Constructor.
Args:
categories: A list of dicts, each of which has the following keys -
'id': (required) an integer id uniquely identifying this
category.
'name': (required) string representing category name e.g.,
'cat', 'dog'.
"""
self._categories = categories
@abstractmethod
def add_single_ground_truth_image_info(self, image_id, groundtruth_dict):
"""Adds groundtruth for a single image to be used for evaluation.
Args:
image_id: A unique string/integer identifier for the image.
groundtruth_dict: A dictionary of groundtruth numpy arrays required
for evaluations.
"""
@abstractmethod
def add_single_detected_image_info(self, image_id, detections_dict):
"""Adds detections for a single image to be used for evaluation.
Args:
image_id: A unique string/integer identifier for the image.
detections_dict: A dictionary of detection numpy arrays required
for evaluation.
"""
@abstractmethod
def evaluate(self):
"""Evaluates detections and returns a dictionary of metrics."""
@abstractmethod
def clear(self):
"""Clears the state to prepare for a fresh evaluation."""
class ObjectDetectionEvaluator(DetectionEvaluator):
"""A class to evaluate detections."""
def __init__(self,
categories,
matching_iou_threshold=0.5,
evaluate_corlocs=False,
metric_prefix=None,
use_weighted_mean_ap=False,
evaluate_masks=False):
"""Constructor.
Args:
categories: A list of dicts, each of which has the following keys -
'id': (required) an integer id uniquely identifying this
category.
'name': (required) string representing category name e.g.,
'cat', 'dog'.
matching_iou_threshold: IOU threshold to use for matching
groundtruth boxes to detection boxes.
evaluate_corlocs: (optional) boolean which determines if corloc
scores are to be returned or not.
metric_prefix: (optional) string prefix for metric name; if None,
no prefix is used.
use_weighted_mean_ap: (optional) boolean which determines if the
mean average precision is computed directly from the scores and
tp_fp_labels of all classes.
evaluate_masks: If False, evaluation will be performed based on
boxes. If True, mask evaluation will be performed instead.
Raises:
ValueError: If the category ids are not 1-indexed.
"""
super(ObjectDetectionEvaluator, self).__init__(categories)
self._num_classes = max([cat['id'] for cat in categories])
if min(cat['id'] for cat in categories) < 1:
raise ValueError('Classes should be 1-indexed.')
self._matching_iou_threshold = matching_iou_threshold
self._use_weighted_mean_ap = use_weighted_mean_ap
self._label_id_offset = 1
self._evaluate_masks = evaluate_masks
self._evaluation = ObjectDetectionEvaluation(
num_groundtruth_classes=self._num_classes,
matching_iou_threshold=self._matching_iou_threshold,
use_weighted_mean_ap=self._use_weighted_mean_ap,
label_id_offset=self._label_id_offset,
)
self._image_ids = set([])
self._evaluate_corlocs = evaluate_corlocs
self._metric_prefix = (metric_prefix + '_') if metric_prefix else ''
def add_single_ground_truth_image_info(self, image_id, groundtruth_dict):
"""Adds groundtruth for a single image to be used for evaluation.
Args:
image_id: A unique string/integer identifier for the image.
groundtruth_dict: A dictionary containing -
standard_fields.InputDataFields.groundtruth_boxes: float32
numpy array of shape [num_boxes, 4] containing `num_boxes`
groundtruth boxes of the format [ymin, xmin, ymax, xmax] in
absolute image coordinates.
standard_fields.InputDataFields.groundtruth_classes: integer
numpy array of shape [num_boxes] containing 1-indexed
groundtruth classes for the boxes.
standard_fields.InputDataFields.groundtruth_instance_masks:
Optional numpy array of shape [num_boxes, height, width]
with values in 0, 1.
Raises:
ValueError: On adding groundtruth for an image more than once. Will
also raise error if instance masks are not in groundtruth
dictionary.
"""
if image_id in self._image_ids:
raise ValueError(
'Image with id already added.'.format(image_id))
groundtruth_classes = (
groundtruth_dict[
standard_fields.InputDataFields.groundtruth_classes] -
self._label_id_offset)
groundtruth_masks = None
if self._evaluate_masks:
if (standard_fields.InputDataFields.groundtruth_instance_masks
not in groundtruth_dict):
raise ValueError(
'Instance masks not in groundtruth dictionary.')
groundtruth_masks = groundtruth_dict[
standard_fields.InputDataFields.groundtruth_instance_masks]
self._evaluation.add_single_ground_truth_image_info(
image_key=image_id,
groundtruth_boxes=groundtruth_dict[
standard_fields.InputDataFields.groundtruth_boxes],
groundtruth_class_labels=groundtruth_classes,
groundtruth_masks=groundtruth_masks,
)
self._image_ids.update([image_id])
def add_single_detected_image_info(self, image_id, detections_dict):
"""Adds detections for a single image to be used for evaluation.
Args:
image_id: A unique string/integer identifier for the image.
detections_dict: A dictionary containing -
standard_fields.DetectionResultFields.detection_boxes: float32
numpy array of shape [num_boxes, 4] containing `num_boxes`
detection boxes of the format [ymin, xmin, ymax, xmax] in
absolute image coordinates.
standard_fields.DetectionResultFields.detection_scores: float32
numpy array of shape [num_boxes] containing detection
scores for the boxes.
standard_fields.DetectionResultFields.detection_classes:
integer numpy array of shape [num_boxes] containing
1-indexed detection classes for the boxes.
standard_fields.DetectionResultFields.detection_masks: uint8
numpy array of shape [num_boxes, height, width] containing
`num_boxes` masks of values ranging between 0 and 1.
Raises:
ValueError: If detection masks are not in detections dictionary.
"""
detection_classes = (
detections_dict[
standard_fields.DetectionResultFields.detection_classes] -
self._label_id_offset)
detection_masks = None
if self._evaluate_masks:
if (standard_fields.DetectionResultFields.detection_masks
not in detections_dict):
raise ValueError(
'Detection masks not in detections dictionary.')
detection_masks = detections_dict[
standard_fields.DetectionResultFields.detection_masks]
self._evaluation.add_single_detected_image_info(
image_key=image_id,
detected_boxes=detections_dict[
standard_fields.DetectionResultFields.detection_boxes],
detected_scores=detections_dict[
standard_fields.DetectionResultFields.detection_scores],
detected_class_labels=detection_classes,
detected_masks=detection_masks,
)
@staticmethod
def create_category_index(categories):
"""Creates dictionary of COCO compatible categories keyed by category
id.
Args:
categories: a list of dicts, each of which has the following keys:
'id': (required) an integer id uniquely identifying this
category.
'name': (required) string representing category name
e.g., 'cat', 'dog', 'pizza'.
Returns:
category_index: a dict containing the same entries as categories,
but keyed by the 'id' field of each category.
"""
category_index =
for cat in categories:
category_index[cat['id']] = cat
return category_index
def evaluate(self):
"""Compute evaluation result.
Returns:
A dictionary of metrics with the following fields -
1. summary_metrics:
'Precision/mAP@<matching_iou_threshold>IOU': mean average
precision at the specified IOU threshold
2. per_category_ap: category specific results with keys of the form
'PerformanceByCategory/mAP@<matching_iou_threshold>IOU/category'
"""
(per_class_ap, mean_ap, _, _, per_class_corloc,
mean_corloc) = self._evaluation.evaluate()
metric = f'mAP@self._matching_iou_thresholdIOU'
pascal_metrics = self._metric_prefix + metric: mean_ap
if self._evaluate_corlocs:
pascal_metrics[self._metric_prefix +
'Precision/meanCorLoc@IOU'.format(
self._matching_iou_threshold)] = mean_corloc
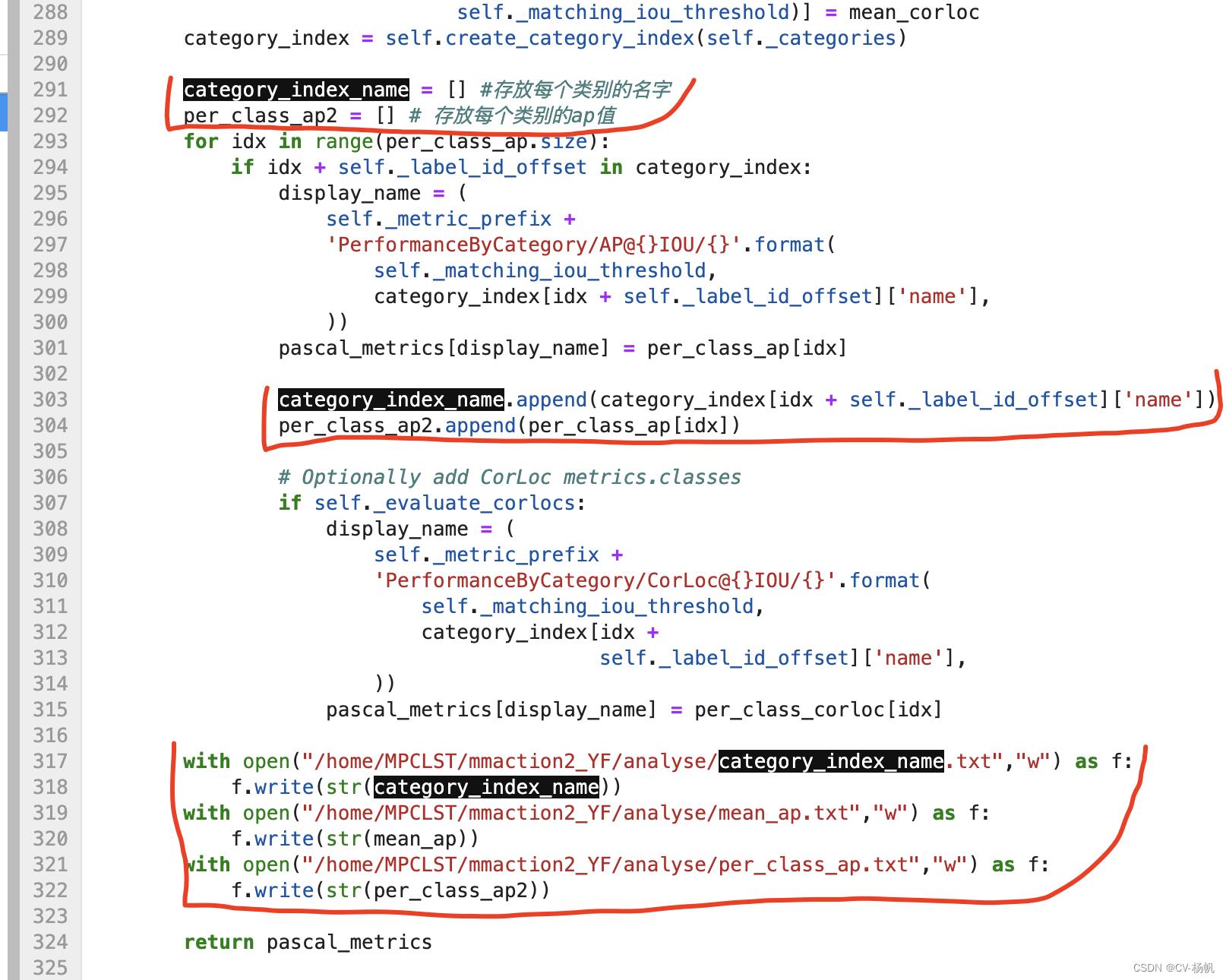
category_index = self.create_category_index(self._categories)
category_index_name = [] #存放每个类别的名字
per_class_ap2 = [] # 存放每个类别的ap值
for idx in range(per_class_ap.size):
if idx + self._label_id_offset in category_index:
display_name = (
self._metric_prefix +
'PerformanceByCategory/AP@IOU/'.format(
self._matching_iou_threshold,
category_index[idx + self._label_id_offset]['name'],
))
pascal_metrics[display_name] = per_class_ap[idx]
category_index_name.append(category_index[idx + self._label_id_offset]['name'])
per_class_ap2.append(per_class_ap[idx])
# Optionally add CorLoc metrics.classes
if self._evaluate_corlocs:
display_name = (
self._metric_prefix +
'PerformanceByCategory/CorLoc@IOU/'.format(
self._matching_iou_threshold,
category_index[idx +
self._label_id_offset]['name'],
))
pascal_metrics[display_name] = per_class_corloc[idx]
with open("/home/MPCLST/mmaction2_YF/analyse/category_index_name.txt","w") as f:
f.write(str(category_index_name))
with open("/home/MPCLST/mmaction2_YF/analyse/mean_ap.txt","w") as f:
f.write(str(mean_ap))
with open("/home/MPCLST/mmaction2_YF/analyse/per_class_ap.txt","w") as f:
f.write(str(per_class_ap2))
return pascal_metrics
def clear(self):
"""Clears the state to prepare for a fresh evaluation."""
self._evaluation = ObjectDetectionEvaluation(
num_groundtruth_classes=self._num_classes,
matching_iou_threshold=self._matching_iou_threshold,
use_weighted_mean_ap=self._use_weighted_mean_ap,
label_id_offset=self._label_id_offset,
)
self._image_ids.clear()
class PascalDetectionEvaluator(ObjectDetectionEvaluator):
"""A class to evaluate detections using PASCAL metrics."""
def __init__(self, categories, matching_iou_threshold=0.5):
super(PascalDetectionEvaluator, self).__init__(
categories,
matching_iou_threshold=matching_iou_threshold,
evaluate_corlocs=False,
use_weighted_mean_ap=False,
)
ObjectDetectionEvalMetrics = collections.namedtuple(
'ObjectDetectionEvalMetrics',
[
'average_precisions',
'mean_ap',
'precisions',
'recalls',
'corlocs',
'mean_corloc',
],
)
class ObjectDetectionEvaluation:
"""Internal implementation of Pascal object detection metrics."""
def __init__(self,
num_groundtruth_classes,
matching_iou_threshold=0.5,
nms_iou_threshold=1.0,
nms_max_output_boxes=10000,
use_weighted_mean_ap=False,
label_id_offset=0):
if num_groundtruth_classes < 1:
raise ValueError(
'Need at least 1 groundtruth class for evaluation.')
self.per_image_eval = per_image_evaluation.PerImageEvaluation(
num_groundtruth_classes=num_groundtruth_classes,
matching_iou_threshold=matching_iou_threshold,
)
self.num_class = num_groundtruth_classes
self.use_weighted_mean_ap = use_weighted_mean_ap
self.label_id_offset = label_id_offset
self.groundtruth_boxes =
self.groundtruth_class_labels =
self.groundtruth_masks =
self.num_gt_instances_per_class = np.zeros(self.num_class, dtype=int)
self.num_gt_imgs_per_class = np.zeros(self.num_class, dtype=int)
self._initialize_detections()
def _initialize_detections(self):
self.detection_keys = set()
self.scores_per_class = [[] for _ in range(self.num_class)]
self.tp_fp_labels_per_class = [[] for _ in range(self.num_class)]
self.num_images_correctly_detected_per_class = np.zeros(self.num_class)
self.average_precision_per_class = np.empty(
self.num_class, dtype=float)
self.average_precision_per_class.fill(np.nan)
self.precisions_per_class = []
self.recalls_per_class = []
self.corloc_per_class = np.ones(self.num_class, dtype=float)
def clear_detections(self):
self._initialize_detections()
def add_single_ground_truth_image_info(self,
image_key,
groundtruth_boxes,
groundtruth_class_labels,
groundtruth_masks=None):
"""Adds groundtruth for a single image to be used for evaluation.
Args:
image_key: A unique string/integer identifier for the image.
groundtruth_boxes: float32 numpy array of shape [num_boxes, 4]
containing `num_boxes` groundtruth boxes of the format
[ymin, xmin, ymax, xmax] in absolute image coordinates.
groundtruth_class_labels: integer numpy array of shape [num_boxes]
containing 0-indexed groundtruth classes for the boxes.
groundtruth_masks: uint8 numpy array of shape
[num_boxes, height, width] containing `num_boxes` groundtruth
masks. The mask values range from 0 to 1.
"""
if image_key in self.groundtruth_boxes:
warnings.warn(('image %s has already been added to the ground '
'truth database.'), image_key)
return
self.groundtruth_boxes[image_key] = groundtruth_boxes
self.groundtruth_class_labels[image_key] = groundtruth_class_labels
self.groundtruth_masks[image_key] = groundtruth_masks
self._update_ground_truth_statistics(groundtruth_class_labels)
def add_single_detected_image_info(self,
image_key,
detected_boxes,
detected_scores,
detected_class_labels,
detected_masks=None):
"""Adds detections for a single image to be used for evaluation.
Args:
image_key: A unique string/integer identifier for the image.
detected_boxes: float32 numpy array of shape [num_boxes, 4]
containing `num_boxes` detection boxes of the format
[ymin, xmin, ymax, xmax] in absolute image coordinates.
detected_scores: float32 numpy array of shape [num_boxes]
containing detection scores for the boxes.
detected_class_labels: integer numpy array of shape [num_boxes]
containing 0-indexed detection classes for the boxes.
detected_masks: np.uint8 numpy array of shape
[num_boxes, height, width] containing `num_boxes` detection
masks with values ranging between 0 and 1.
Raises:
ValueError: if the number of boxes, scores and class labels differ
in length.
"""
if len(detected_boxes) != len(detected_scores) or len(
detected_boxes) != len(detected_class_labels):
raise ValueError(
'detected_boxes, detected_scores and '
'detected_class_labels should all have same lengths. Got'
'[%d, %d, %d]' % len(detected_boxes),
len(detected_scores),
len(detected_class_labels),
)
if image_key in self.detection_keys:
warnings.warn(('image %s has already been added to the ground '
'truth database.'), image_key)
return
self.detection_keys.add(image_key)
if image_key in self.groundtruth_boxes:
groundtruth_boxes = self.groundtruth_boxes[image_key]
groundtruth_class_labels = self.groundtruth_class_labels[image_key]
# Masks are popped instead of look up. The reason is that we do not
# want to keep all masks in memory which can cause memory overflow.
groundtruth_masks = self.groundtruth_masks.pop(image_key)
else:
groundtruth_boxes = np.empty(shape=[0, 4], dtype=float)
groundtruth_class_labels = np.array([], dtype=int)
if detected_masks is None:
groundtruth_masks = None
else:
groundtruth_masks = np.empty(shape=[0, 1, 1], dtype=float)
(
scores,
tp_fp_labels,
) = self.per_image_eval.compute_object_detection_metrics(
detected_boxes=detected_boxes,
detected_scores=detected_scores,
detected_class_labels=detected_class_labels,
groundtruth_boxes=groundtruth_boxes,
groundtruth_class_labels=groundtruth_class_labels,
detected_masks=detected_masks,
groundtruth_masks=groundtruth_masks,
)
for i in range(self.num_class):
if scores[i].shape[0] > 0:
self.scores_per_class[i].append(scores[i])
self.tp_fp_labels_per_class[i].append(tp_fp_labels[i])
def _update_ground_truth_statistics(self, groundtruth_class_labels):
"""Update grouth truth statitistics.
Args:
groundtruth_class_labels: An integer numpy array of length M,
representing M class labels of object instances in ground truth
"""
count = defaultdict(lambda: 0)
for label in groundtruth_class_labels:
count[label] += 1
for k in count:
self.num_gt_instances_per_class[k] += count[k]
self.num_gt_imgs_per_class[k] += 1
def evaluate(self)以上是关于mmaction2 入门教程 03评价指标可视化 mAP每类行为的ap值每类行为的数量的主要内容,如果未能解决你的问题,请参考以下文章