卡通驱动项目ThreeDPoseTracker——模型驱动解析
Posted 风翼冰舟
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了卡通驱动项目ThreeDPoseTracker——模型驱动解析相关的知识,希望对你有一定的参考价值。
前言
之前解析过ThreeDPoseTracker这个项目中的深度学习模型,公众号有兄弟私信一些问题,我刚好对这个项目实现有兴趣,就分析一波源码,顺便把问题解答一下。
这个源码其实包括很多内容:3D姿态估计,坐标平滑,骨骼驱动,物理仿真等,非常值得分析。
参考博客:
ThreeDPoseTracker源码
理论与实现
核心代码是源码中的VNectModel.cs,主要是用预测出的3D坐标驱动卡通人体模型,包括内容有:
- 根关节位置
- 各关节旋转信息
其核心在于旋转量的确定,至于根关节位置的确定,感觉涉及到很多乱七八糟的内置参数,就不详细介绍了,但是会额外提供一个我用到天荒地老的计算方法。
如果下面的理论看不懂,推荐看看我按照源码复现的一套简化流程,一千行源码直接重写成两百多行。
预备知识——“LookRotation”
源码中有个至关重要的函数LookRotation(a,b),它的作用是:
- 使得
z轴(蓝色)始终精准指向a方向 - 使得
y轴(绿色)始终偏向b方向
为什么一个是精准指向,一个是偏向,因为y和z轴是垂直的,如果a和b不垂直,那么此函数就会保证z与a同方向,y和b大致同向,看图
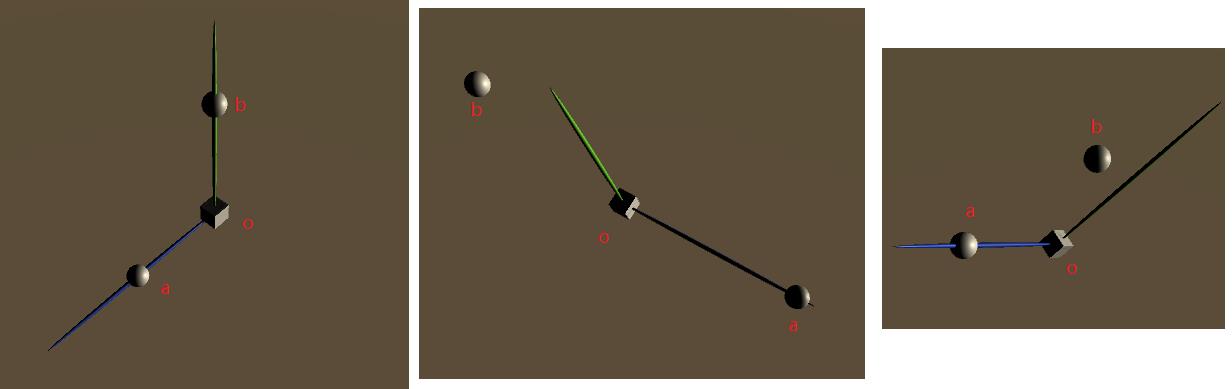
正方体为物体,绿色和蓝色分别为y和z轴,两个小球分别为y和z的目标方向。
左图为标准的指向,中间和右图为调整了目标方向后,物体的y和z的指向,可以发现,蓝色z轴始终指向目标,但是绿色y轴是偏向那个方向,因为是立体图,看着绿轴偏的很远,其实是差不多的。
总而言之,蓝轴始终是向着oa方向,绿轴向着ob与oa组成的平面中与oa垂直的方向。
驱动问题解读
如果扫过一眼代码,会发现有很多重复代码,无外乎以下几类:
初始化Init()的时候有:
AddSkeleton(xx,yy)
xx.Inverse = Quaternion.Inverse(Quaternion.LookRotation(xx.position - xxx.position, yy));
xx.InverseRotation = xx.Inverse*xx.InitRotation
驱动PoseUpdate的时候有:
xx = TriangleNormal(aa,bb,cc)
xx.rotation = Quaternion.LookRotation(yy) * xx.InverseRotation;
会发现初始化和驱动时候貌似是一种反向计算,所以才出现这么多逆(inverse)。
为什么要用LookRotation计算各个关节的旋转,而非对某根骨骼直接通过Quaternion.FromToRotation(a,b)计算出初始姿态到新的姿态下需要的旋转矩阵呢?
- 如果只用
FromToRotation计算向量到向量的旋转,只能控制位置正确,无法控制方向正确,比如根关节到颈部是直着上去的,这时候人也可以侧身也可以面向前方,所以对关节必须控制至少两个方向的旋转,因此必须使用LookRotation去控制z和y轴朝向。
为什么用了LookRotation还要求这么多逆(inverse)?
- 同一个模型的不同关节具有不同的初始旋转量(即
InitRotation),而且不同人的同一个关节也可能具有不同的旋转量,甚至初始的局部坐标轴都不同,比如源码中提供的两个模型的膝盖部分局部坐标系如下

此时如果用LookRotation,不同的人就需要设置对应的规则,比如同一个姿态,左边的人蓝色z轴向后,右边人蓝色z轴向前,搞不好还有其它的情况,此时就无法用基于LookRotation的同一套代码去驱动这个人了。
如果还是不懂为什么不能用同一套代码驱动,可以举个例子:小腿向后收起的时候,左图的LookRotation必须保证蓝轴向上,右图必须保证蓝轴向下,如下图:

由于坐标轴最终的方向都不同,所以即使是同一个姿势,对于具有不同坐标系的相同关节也需要针对性LookRotation。
那么为什么源码里面可以使用LookRotation去玩驱动,很简单,因为源码将所有的关节都利用初始姿态做了LookRotation的对齐,得到了一个中间矩阵,即源码中的xx.InverseRotation,利用这个中间矩阵就能在驱动的时候对齐所有坐标系,达到通用目的。
源码分析与复现
如何实现上述问题中的坐标系对齐呢?
利用初始姿态下各关节的坐标和旋转来确定,具体是:
当前关节的
l
o
o
k
r
o
t
a
t
i
o
n
=
初始旋转
I
n
i
t
R
o
t
a
t
i
o
n
×
对齐矩阵
当前关节的lookrotation = 初始旋转InitRotation \\times 对齐矩阵
当前关节的lookrotation=初始旋转InitRotation×对齐矩阵
所以源码中的下面类似代码就是为了求解对齐矩阵:
xx.Inverse = Quaternion.Inverse(Quaternion.LookRotation(xx.position - xxx.position, yy));
xx.InverseRotation = xx.Inverse*xx.InitRotation
看不懂就可以写成
Quaternion.LookRotation(xx.position - xxx.position, yy) = xx.InitRotation * Quaternion.Inverse(xx.InverseRotation)
这就对应上述公式,其中Quaternion.Inverse(xx.InverseRotation)就对应了对齐矩阵。
因此我在复现时候,以根关节的对齐矩阵为例,把上述代码改成了
root = animator.GetBoneTransform(HumanBodyBones.Hips);
midRoot = Quaternion.Inverse(root.rotation) * Quaternion.LookRotation(forward);
其中forward是按照源码的要求,指示人体的当前方向。
如何设置LookRotation的方向?
继续分析源码,发现对于所有关节都做了
var forward = TriangleNormal(jointPoints[PositionIndex.hip.Int()].Transform.position, jointPoints[PositionIndex.lThighBend.Int()].Transform.position, jointPoints[PositionIndex.rThighBend.Int()].Transform.position);
jointPoint.Inverse = GetInverse(jointPoint, jointPoint.Child, forward);
jointPoint.InverseRotation = jointPoint.Inverse * jointPoint.InitRotation;
第一行,基于根关节和左右胯关节坐标计算出人体朝向,然后以此作为所有关节的LookRotation的y方向,以及每个关节与其子关节的方向作为z方向,计算出中间矩阵。
注意,在接下来,分别对头部和手掌单独又计算了一遍,因为他俩比较特殊
对于头部,直接求解出头到鼻子的向量作为LookRotation的z方向,未设置y方向。
var gaze = jointPoints[PositionIndex.Nose.Int()].Transform.position - jointPoints[PositionIndex.head.Int()].Transform.position; // head的方向是head->Nose
head.Inverse = Quaternion.Inverse(Quaternion.LookRotation(gaze));
然后计算头部的中间矩阵
head.Inverse = Quaternion.Inverse(Quaternion.LookRotation(gaze));
head.InverseRotation = head.Inverse * head.InitRotation;
对于手腕,直接利用手腕、大拇指、中指的坐标,计算出手掌方向作为LookRotation的y方向,
var lf = TriangleNormal(lHand.Pos3D, jointPoints[PositionIndex.lMid1.Int()].Pos3D, jointPoints[PositionIndex.lThumb2.Int()].Pos3D); // 手掌方向
var rf = TriangleNormal(rHand.Pos3D, jointPoints[PositionIndex.rThumb2.Int()].Pos3D, jointPoints[PositionIndex.rMid1.Int()].Pos3D);
而左手腕以大拇指到中指的方向为z方向,而右手腕以中指到大拇指方向为z方向:
lHand.Inverse = Quaternion.Inverse(Quaternion.LookRotation(jointPoints[PositionIndex.lThumb2.Int()].Transform.position - jointPoints[PositionIndex.lMid1.Int()].Transform.position, lf));
rHand.Inverse = Quaternion.Inverse(Quaternion.LookRotation(jointPoints[PositionIndex.rThumb2.Int()].Transform.position - jointPoints[PositionIndex.rMid1.Int()].Transform.position, rf));
再分别求解出中间矩阵:
lHand.InverseRotation = lHand.Inverse * lHand.InitRotation;
rHand.InverseRotation = rHand.Inverse * rHand.InitRotation;
其实完全没必要区分这么明显,只需要求解和使用的时候对应好就行了,比如我实现的时候就统一大拇指到中指:
midLhand = Quaternion.Inverse(lhand.rotation) * Quaternion.LookRotation(
lthumb2.position - lmid1.position,
TriangleNormal(lhand.position, lthumb2.position, lmid1.position)
);
midRhand = Quaternion.Inverse(rhand.rotation) * Quaternion.LookRotation(
rthumb2.position - rmid1.position,
TriangleNormal(rhand.position, rthumb2.position, rmid1.position)
);
也就是说,对于某些特定关节,需要单独设置用于计算中间变换矩阵的LookRotation信息。推荐看我实现的源码,分为躯干、头、手掌三个部分,我实现的源码就不贴了,文末找。
注意这里计算初始姿态中各关节的LookRotation方法与运行时从深度学习预测的3D关节坐标中计算的LookRotation方案要一模一样。
如何驱动?
通过
当前关节的
l
o
o
k
r
o
t
a
t
i
o
n
=
初始旋转
I
n
i
t
R
o
t
a
t
i
o
n
×
对齐矩阵
当前关节的lookrotation = 初始旋转InitRotation \\times 对齐矩阵
当前关节的lookrotation=初始旋转InitRotation×对齐矩阵
得到了每个关节的对齐矩阵,那么这个公式很容易得到每个关节的当前旋转信息:
当前旋转
R
o
t
a
t
i
o
n
=
当前关节的
l
o
o
k
r
o
t
a
t
i
o
n
×
Q
u
a
t
e
r
n
i
o
n
.
I
n
v
e
r
s
e
(
对齐矩阵
)
当前旋转Rotation = 当前关节的lookrotation \\times Quaternion.Inverse(对齐矩阵)
当前旋转Rotation=当前关节的lookrotation×Quaternion.Inverse(对齐矩阵)
然后分析源码,在PoseUpdate()函数中,前面的不用看,是计算根关节坐标的,我们先关注关节旋转。
注意因为用对齐矩阵是从初始姿态获取的,所以如何依据初始姿态计算的lookrotation就要按照同样的方法从深度学习模型预测的3D关节坐标中计算对应的lookrotation参数。
比如人体方向依旧是根、左右胯部的坐标计算:
var forward = TriangleNormal(jointPoints[PositionIndex.hip.Int()].Pos3D, jointPoints[PositionIndex.lThighBend.Int()].Pos3D, jointPoints[PositionIndex.rThighBend.Int()].Pos3D);
而根关节当前的旋转就是根据上述公式计算得到:
jointPoints[PositionIndex.hip.Int()].Transform.rotation = Quaternion.LookRotation(forward) * jointPoints[PositionIndex.hip.Int()].InverseRotation;
其它关节我不贴源码了,直接描述:
躯干关节:以身体方向为LookRotation的y方向,以当前关节到其子关节的方向为z方向。
手腕:以手腕、大拇指、中指形成的平面的法线方向为y方向,以拇指到中指的方向为z方向。
比如我随便贴一下我复现的左臂(肩、肘、腕)实时驱动:
// 左臂
lshoulder.rotation = Quaternion.LookRotation(pred3D[5] - pred3D[6], forward) * Quaternion.Inverse(midLshoulder);
lelbow.rotation = Quaternion.LookRotation(pred3D[6] - pred3D[7], forward) * Quaternion.Inverse(midLelbow);
lhand.rotation = Quaternion.LookRotation(pred3D[8] - pred3D[9],
TriangleNormal(pred3D[7], pred3D[8], pred3D[9]))*Quaternion.Inverse(midLhand);
其中pred3D就是深度学习模型预测的3D关节坐标。
人体位置
上述讲解了旋转的计算方法,关于整个人体的位置,源码中自有一套方案,但是里面预设了很多固定参数,不是特别想分析,所以用了万年不变的方法,计算unity人物模型腿的长度和深度学习预测的腿部长度,然后计算比例系数,乘到深度学习预测的根关节位置即可。
float tallShin = (Vector3.Distance(pred3D[16], pred3D[17]) + Vector3.Distance(pred3D[20], pred3D[21]))/2.0f;
float tallThigh = (Vector3.Distance(pred3D[15], pred3D[16]) + Vector3.Distance(pred3D[19], pred3D[20]))/2.0f;
float tallUnity = (Vector3.Distance(lhip.position, lknee.position) + Vector3.Distance(lknee.position, lfoot.position)) / 2.0f +
(Vector3.Distance(rhip.position, rknee.position) + Vector3.Distance(rknee.position, rfoot.position));
root.position = pred3D[24] * (tallUnity/(tallThigh+tallShin));
是不是超级简单,虽然效果有点偏差,但是后续还是会分析一下源码中更新人体位置的方案。
复现流程
在VNectModel.cs中的PoseUpdate函数加入以下代码:
FileStream fs = new FileStream(@"D:\\code\\Unity\\ThreeDExperiment\\Assets\\Resources\\record.txt", FileMode.Append);
StreamWriter sw = new StreamWriter(fs);
//写入
foreach(JointPoint jointPoint in jointPoints)
sw.Write(jointPoint.Pos3D.x.ToString() + " " + jointPoint.Pos3D.y.ToString() + " " + jointPoint.Pos3D.z.ToString() + " ");
sw.WriteLine();
sw.Flush();
sw.Close();
fs.Close();
将关键点写入到txt中做复现时候用的3D关键点数据
然后按照理论进行复现后效果如下:
红色为预测的3D坐标,人物模型会做出与红色骨架一样的姿势。
结论
这个感觉还是没有考虑人体运动的动力学特性,如果跑过源码,很容易发现个别姿势会出现奇怪的关节扭曲现象,这就是不考虑动力学的后果,给我自己之前的代码打一波广告,那个绝对比这个好,哈哈。
完整的unity实现放在微信公众号的简介中描述的github中,有兴趣可以去找找。或者在公众号回复“ThreeDPose",同时文章也同步到微信公众号中,有疑问或者兴趣欢迎公众号私信。
以上是关于卡通驱动项目ThreeDPoseTracker——模型驱动解析的主要内容,如果未能解决你的问题,请参考以下文章