激光slam课程学习笔记--第11课:3D激光SLAM介绍
Posted 鸿_H
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了激光slam课程学习笔记--第11课:3D激光SLAM介绍相关的知识,希望对你有一定的参考价值。
前言:这系列笔记是学习曾书格老师的激光slam课程所得,这里分享只是个人理解,有误之处,望大佬们赐教。这节课主要介绍一些3d slam数学知识,以及典型代表loam。
1. 3d激光SLAM
1.1 介绍

[在地图上,2d的是三个自由度的;3d的是六个自由度的;三维包含微分流形(多次的三个自由度导致的)(个人没理解)]
1.2 对比
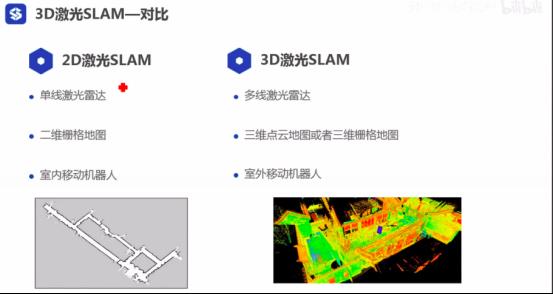
1.3 3d slam的帧间匹配--点到面距离方法

[回环检测,本质也是帧间匹配]
[这里的目标函数表示的是点到面的距离]
1.4 帧间匹配算法--基于特征的方法
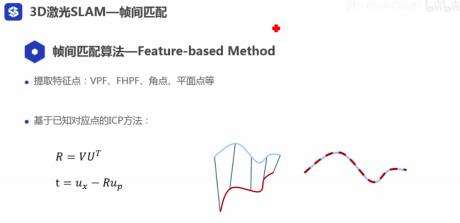
[由于其采用的多线雷达,匹配时可类似采用图像的方式(基于特征方法)进行帧间匹配]
1.5 NDT方法
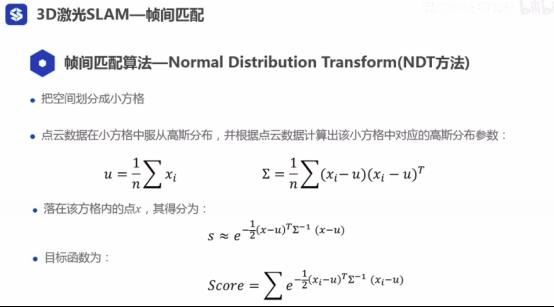
[该方法和似然场方法类似][目标函数的每个方格是连续的]
[老师说,在领域中,公式是基础,但是最重要的是奇思妙想,因为公式是大家都是知道的,但是区别别人的,就是个人的奇思妙想]
2. LOAM
[介绍基本流程+代码]
[这里的loam方法,只有匹配,没有回环]
2.1 loam
[该方法没有做了回环的]
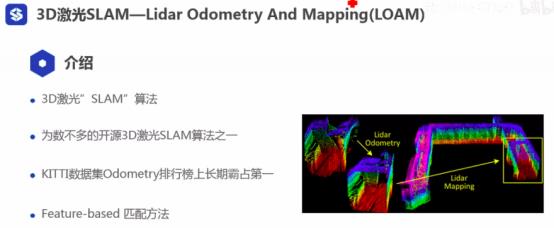
[帧间匹配+单帧局部子图匹配]
[特征匹配方法,提取特征进行匹配;老师建议多种方法使用最好]
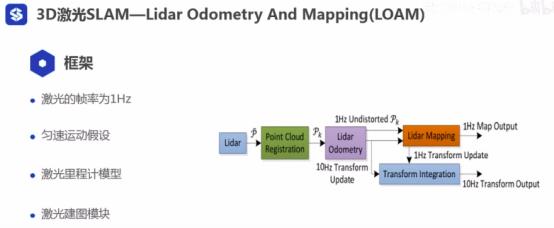
2.2 框架
2.3 激光里程计模块

[edge point 指的是两个面的交接处的点;planar point 指的是面上的点(非边界处)][两种点的划分,是根据曲率进行划分的,利用点的附近点进行曲率计算;曲率大的称为edge point,小的称为planar point]
[去除不稳定点,左侧图的b点是跟射线平行的,这种点会被剔除;右侧图的a点从一个角度看是edge point,从另外一个角度看,其又属于planar point,故直接剔除]
2.4 特征点匹配
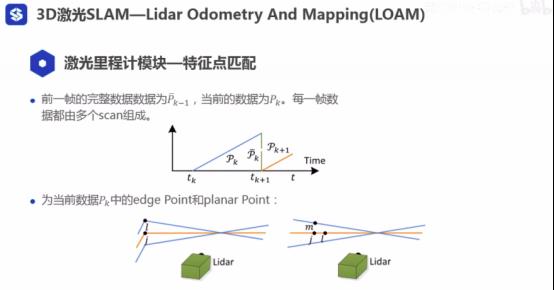
[注意当前的数据pk是不完整的]

[点到线的距离][点到面的距离]
2.5 运动估计
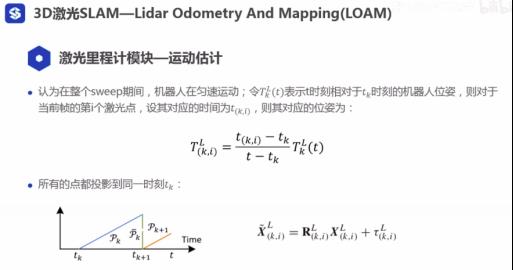
[位姿涉及线性插值]

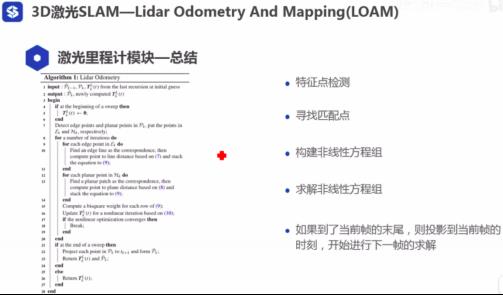
2.6 总结--里程计模块
2.7 总结--激光建图模块
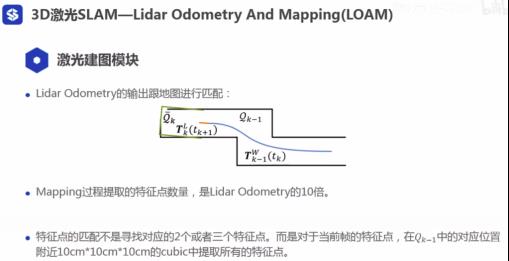
[Qk,是去除畸变的完整sweep]
2.8 总结--直线匹配
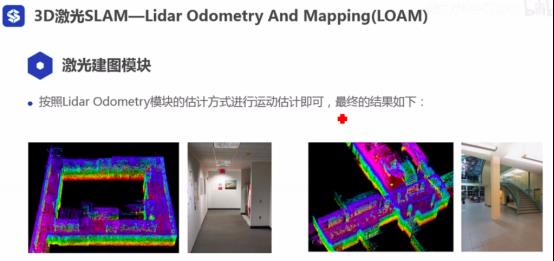
2.9 例子
[帧间匹配+建图+定位+图优化--->激光slam算法,老师认为这些知识都讲解了,我们应该可以自己编写一个简单的激光slam算法(个人表示还不会,实在惭愧)]
#####################
[跑马观花,公式原理都没有理解,代码也没有理解]
该系列课程2022年正月初二晚上22:13结
图片版权归原作者所有
致谢曾老师的付出
不积硅步,无以至千里
好记性不如烂笔头
感觉有点收获的话,麻烦大大们点赞收藏哈
以上是关于激光slam课程学习笔记--第11课:3D激光SLAM介绍的主要内容,如果未能解决你的问题,请参考以下文章