BetaFlight & BeeRotorF3 四轴飞行器配置F450
Posted lida2003
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了BetaFlight & BeeRotorF3 四轴飞行器配置F450相关的知识,希望对你有一定的参考价值。
BetaFlight & BeeRotorF3 四轴飞行器配置F450
最近有一个网友,讨论过程中发现他期望搞一个大一点(10寸左右),性价比高的无人机。
根据长时间的了解,其主要需求大致描述如下:
- 不是穿越机
- 也不是航拍机
- 就是想通过亲手控制操作了解下无人机
- 后续视情况再定,比如:摄像头,图传,卡录等等
- 性价比高(也许玩一会儿就没兴趣不玩了)
好吧!!!这个需求确实有点那个,不管如何,通过几次讨论和度娘了一些资料,貌似找到一些解决方法,整体成本应该基本可控。
1. 需求澄清
所有解决问题第一个步骤就是澄清需求,可能有人说,前面不都描述了嘛。那我只能说“Oh no…”,这种需求就是伪需求,不明确或者压根无法执行的落地的用户描述。
这里我们根据用户描述,将需求澄清清楚,更符合落地实操的工程需求。
1.1 必要组件
- 电机(Motor)+ 电调(ESC,Electronic Speed Control)
- 飞控(FC,Flight Control):集成导航模块(IMU,Inertial Measurement Unit)陀螺仪+加速度
- 动力源:可以采用可充电电池
- 遥控器+遥控接收机
1.2 扩展组件
- GPS(磁力计):通常应用与自动导航或者失控后自动回航等场景。
- 图传+摄像头:配合FPV设备进行第一视角控制操作。
- 云台(摄像机):航拍使用。
- 遥测模块:更多是配合地面站使用。
- 卡录 或 GoPro
- 伴飞电脑 (执行任务 或 高级避障策略等功能)
- 光流计测距
- 超声波测距
- 摄像头定位
- 4G 模块(民用远距离通信控制)
这里不过多罗列,反正一口气能写多少就多少,因为前面用户描述要性价比高,对吧!!!(重点,重点,重点,重要的事情说三遍!!!)
1.3 工程需求
整理了上面无人机的必要组件和扩展组件,接下来就是将用户描述和组件的归纳整理,输出工程需求来落地配一套满足需求的无人机。
- 不穿越(性价比高):FPV需求不强,还可以省图传,眼镜或者平板等显示设备
- 不航拍(性价比高):基本上卡录,Gopro也可以去掉,也能节省一大部分费用
- 要亲手操作控制:理论上自动无头模式,轻松上手体验。无需手动操作繁琐且容易炸机。
- 后续视情况再定:这个需求是最为复杂且不定的。
根据用户描述,也许玩玩没兴趣就直接要扔掉。
需要考虑: (同时要控制费用,可以考虑硬件过时,但尚与开源同步的硬件)
- 自动转手动控制 (注重穿越机)
- 可支持FPV (OSD支持)
- 可支持挂载云台 (大机架)
结合上述分析,我们给出如下配置:
- 【二手】F450: 机架 + 桨叶 + 电机 + 电调
可参考:四轴飞控DIY简明步骤介绍
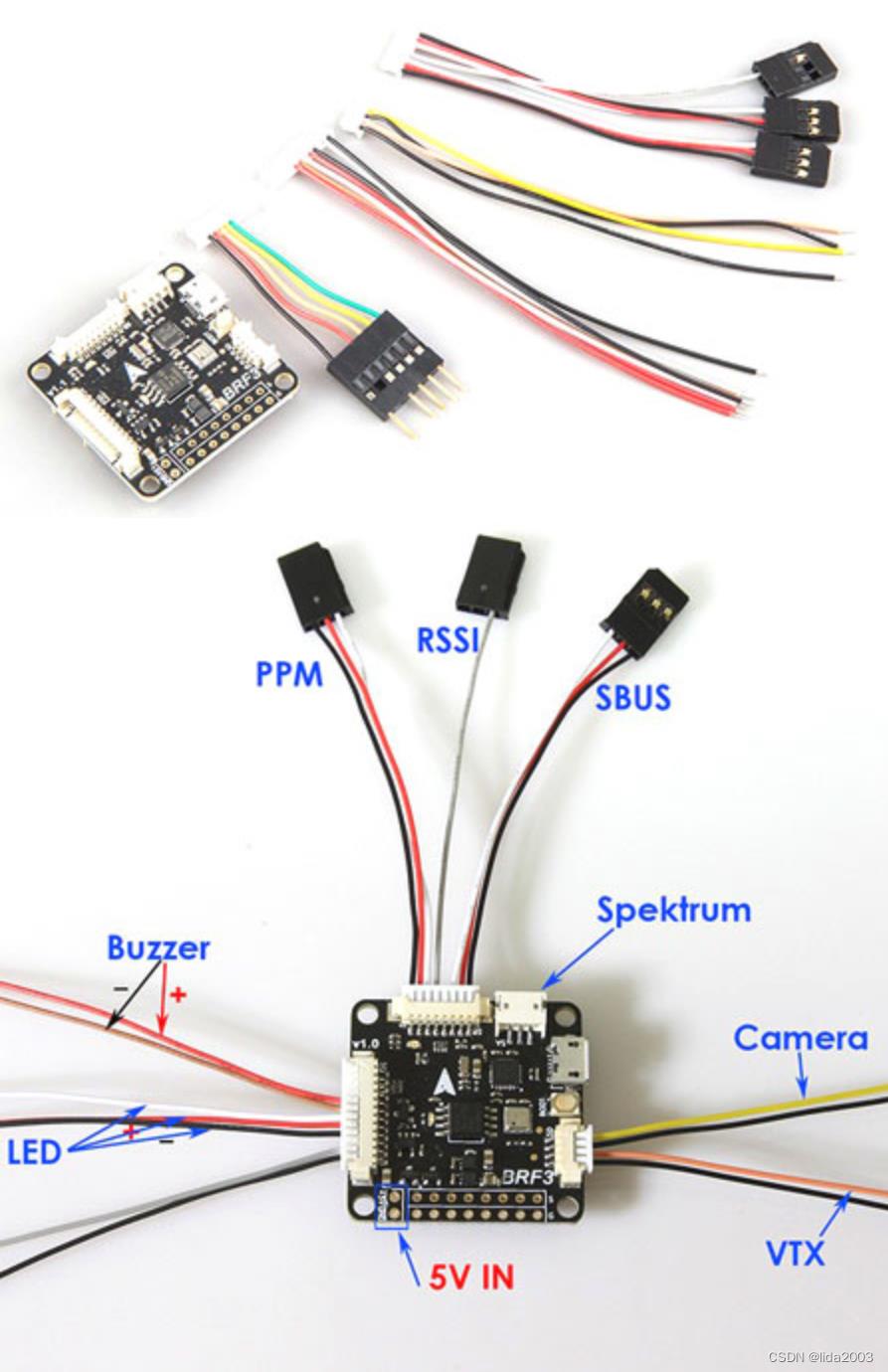
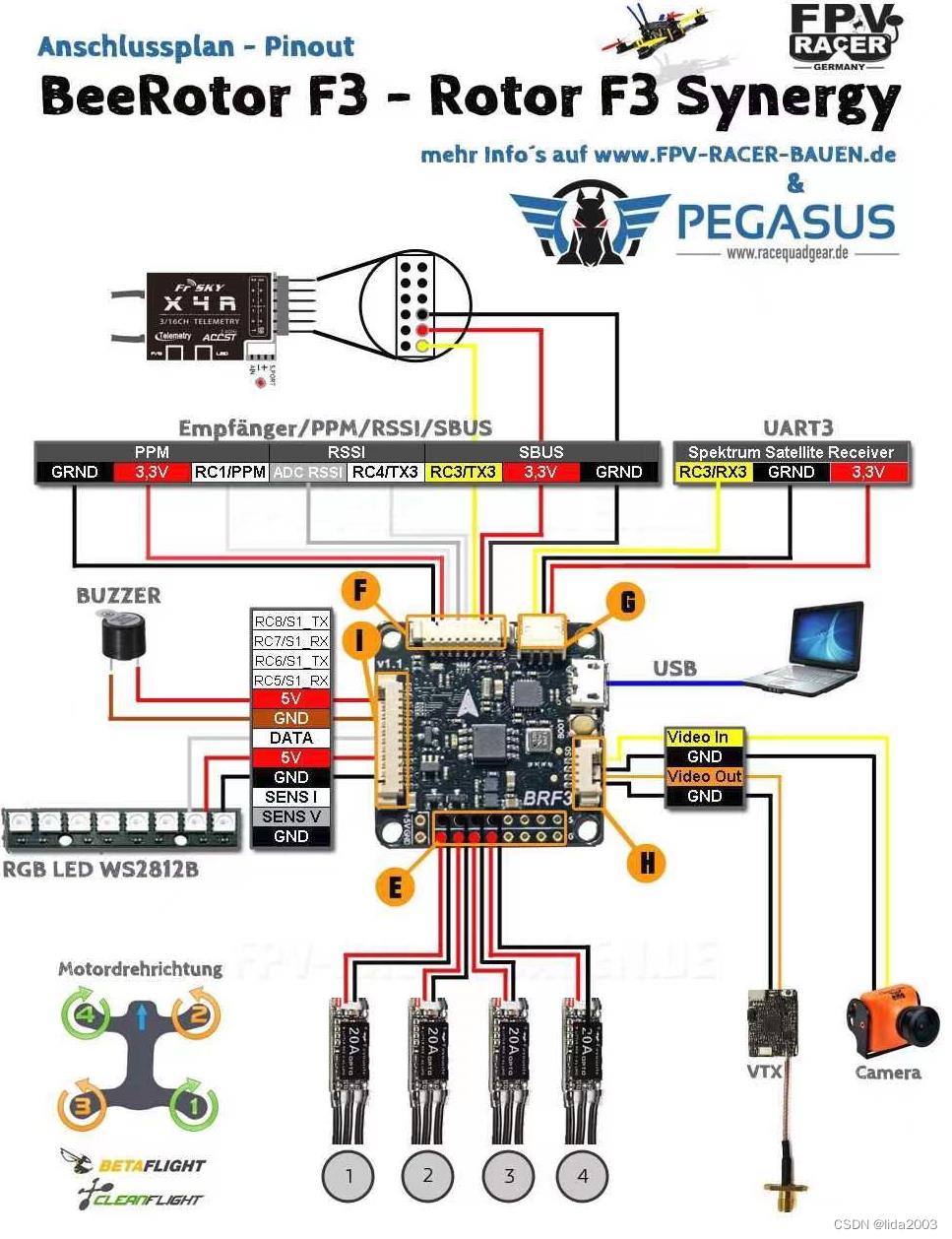
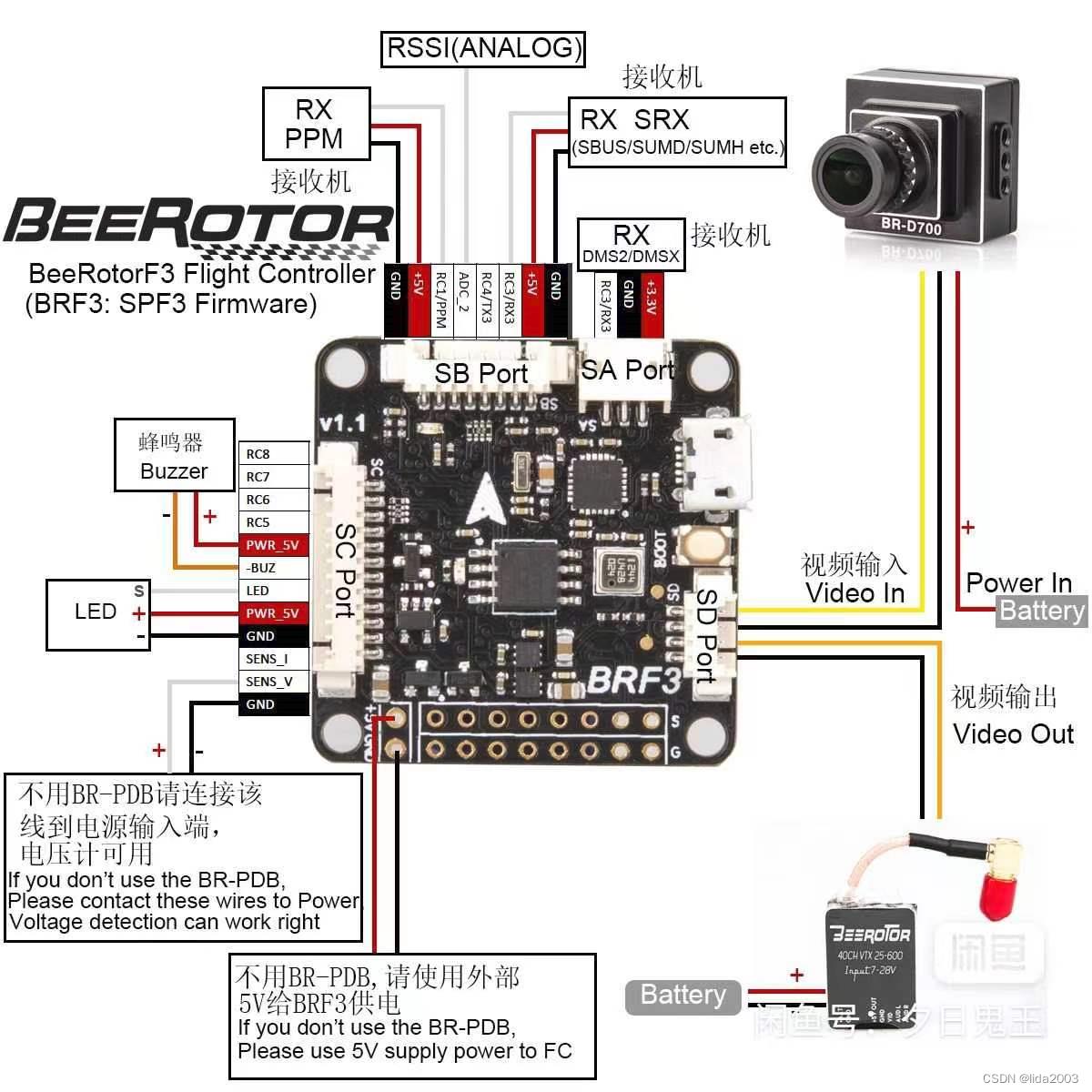
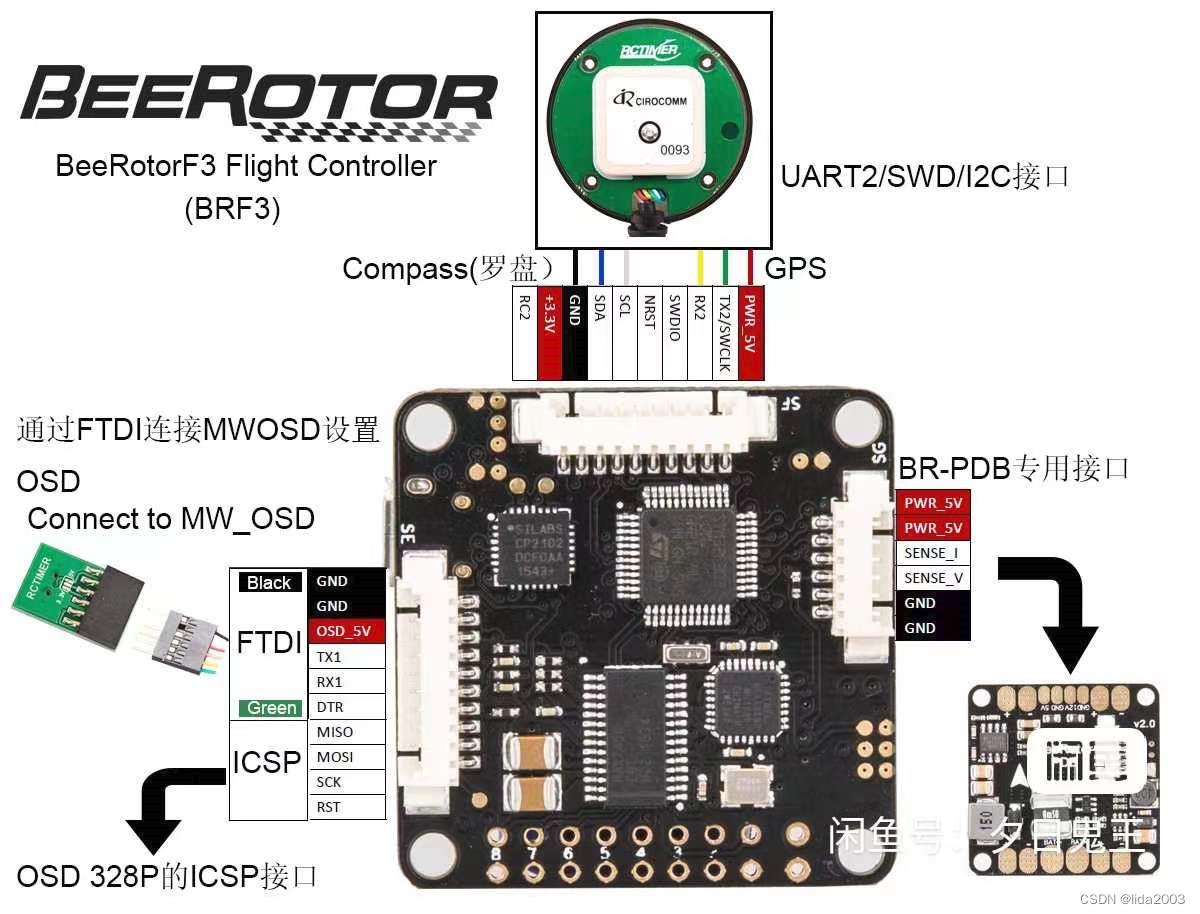
- 【二手】BeerotorF3 (BRF3) all-in-one (AIO):MP6050 + BMP280 + MAX7456
Features
- Optimization for Cleanflight/Betaflight firmware
- ARM Cortex-M4 core STM32F303CC with 32bit/72MHz/256K Flash/40K SRAM and hardware floating point unit
- MPU6050 and BMP180 / BMP280 Sensors
- Build-in 8MB flash for black box log recorder
- On board OSD with absolutely original MAX7456EUI+ and standard FTDI debug port
- Receiver connector with PPM/SBUS/SumD/DSM2/DSMX and RSSI input
- Up to 3 serial ports and 8 PWM outputs
- Multifunction connectors with SWD/UART2~3/Soft-serial/Buzzer/LED trip/Voltage detection
- Multifunction OSD connectors with video_IN/ video_OUT/ICSP/debug port (UART1)
- PDB connector with 5V input/Current and Voltage detection
- Power input reverse polarity protection
Specification
- Power input: 5.0~5.5V
- Dimension: 35x35x9mm
- Fixing hole spacing: 30mm
- Weight: 7.3g
- PPM/RSSI/SBUS/SumD Receiver Cable
- Camera/video-TX cable
- Buzzer/LED strip/voltage detect cable
- OSD debug port to FTDI adapter cable
可参考:
- SPRacingF3 Manual
- SPRacingF3OSD Manual
MP6050 + MS5611 + HMC5883L + MAX7456
- 【重用】遥控器(发射机) + 接收机
建议:投入较多时间和精力去了解
源由:这个是可以沿用的,即使换模型飞机,车,船,基本都可通用。考虑:
- 如果是想后续玩下去的,可以考虑买新的/好的遥控器。毕竟遥控器好,控制的可以更远,手感也更好。(飞机是会摔坏的,更好的模型飞机也在不断的出来。)
- 本着玩着玩着就是扔掉的,那无所谓好坏,买个二手的性价比高就好。后面入门了可以重新配置一套适合自己的。
注:入手BeeRotorF3的时候一定要注意那几根飞控自带的线,否则焊接就不方便了。
2. 组装&配置
2.1 组装
鉴于上面的工程需求,需要采购的组件如下:
注:每个组件购买时应该注意与其他组件连接的软线。
- F450: 机架 + 桨叶 + 电机 + 电调
- BeerotorF3 (BRF3) all-in-one (AIO)
- 遥控器(发射机) + 接收机(SBUS)
- 电池 3S 2200mAh (XT60)
附件:
- XT60座子 + 电源线(红色,黑色各一根,长度约8cm)
- 杜邦线若干(连接接收机与飞控)
- 飞塔固定M3螺柱 + 减震O型圈
注:电调电源直接连接到F450机架分电板上;电机与电调之间要确认是焊接还是香蕉头,采购时提前注意好连接件。
2.2 配置
常规配置,请大家自行度娘,这里不在详说。下面主要列举F450机架比较重要的一些配置参数。
2.2.1 固件烧录
鉴于BeeRotorF3最后的BetaFlight版本(官方发布2019年9月1日)是4.0.6,目前(2022年9月26日)。因此该硬件只有定制编译才能跟上最新4.3的版本,但是常规的BetaFlight功能都已经含有,如果真的需要定制,模友们也有提供。
对于刚上手学习的朋友,请使用下面两个方法烧录:
- 使用 Betaflight Configurator 10.5.1通过网上下载固件烧录
- 使用 Betaflight Configurator 10.5.1,本地下载betaflight_4.0.6_SPRACINGF3.hex ,通过选择本地文件进行烧录
注:烧录方法请详见betaflight-configurator。
2.2.2 PID设置
下面是笔者飞的也比较顺畅的PID数据,供大家参考。
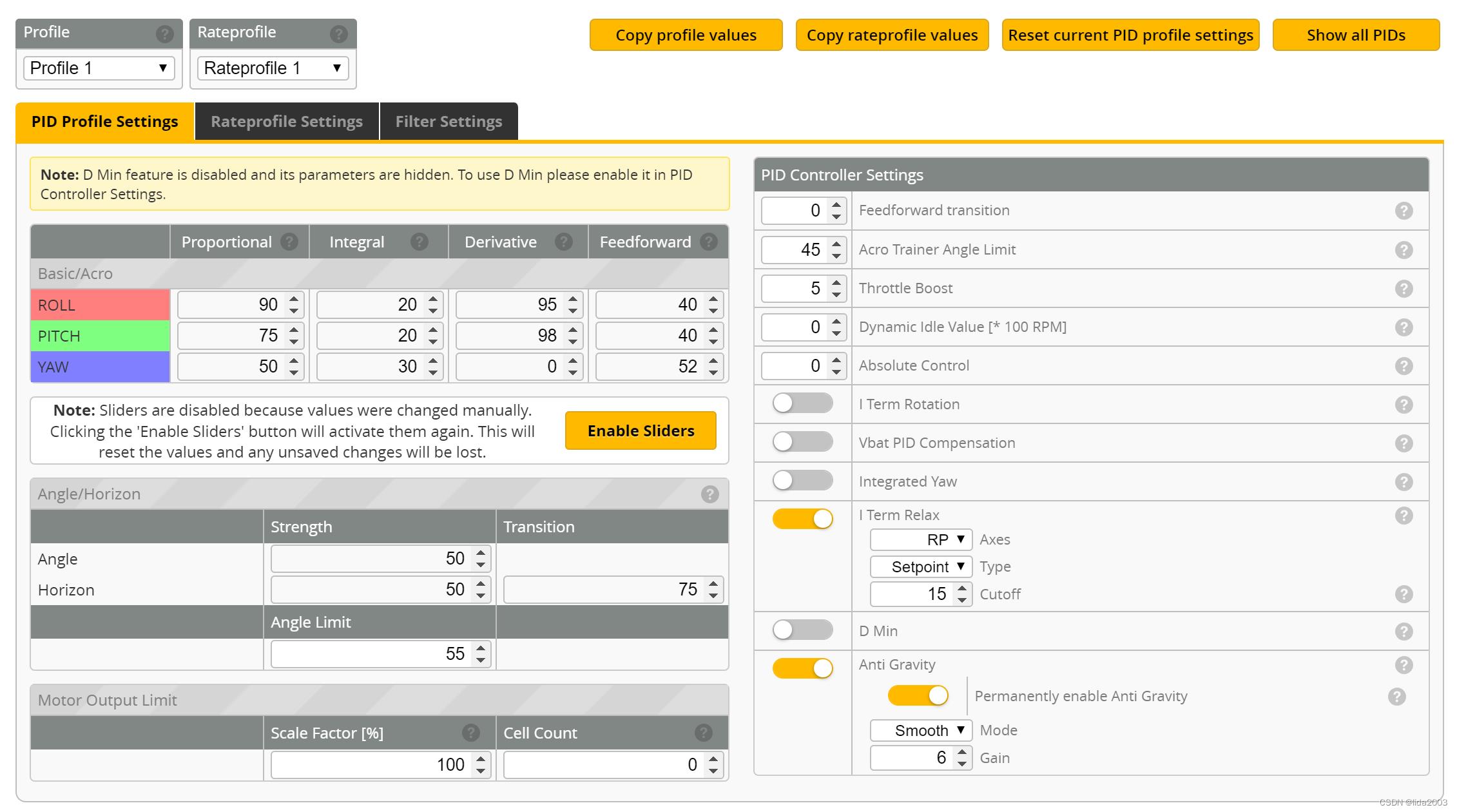
注:笔者给出的PID参数设置是KakuteF7 AIO V1.5 在F450机架上稳定飞行的参数。
2.2.3 滤波设置
F450机架整体来说低频振动比较多,因此和5寸机大不一样。而且由于仿冒品牌差异,实际参数差异也是有的。请大家参考。
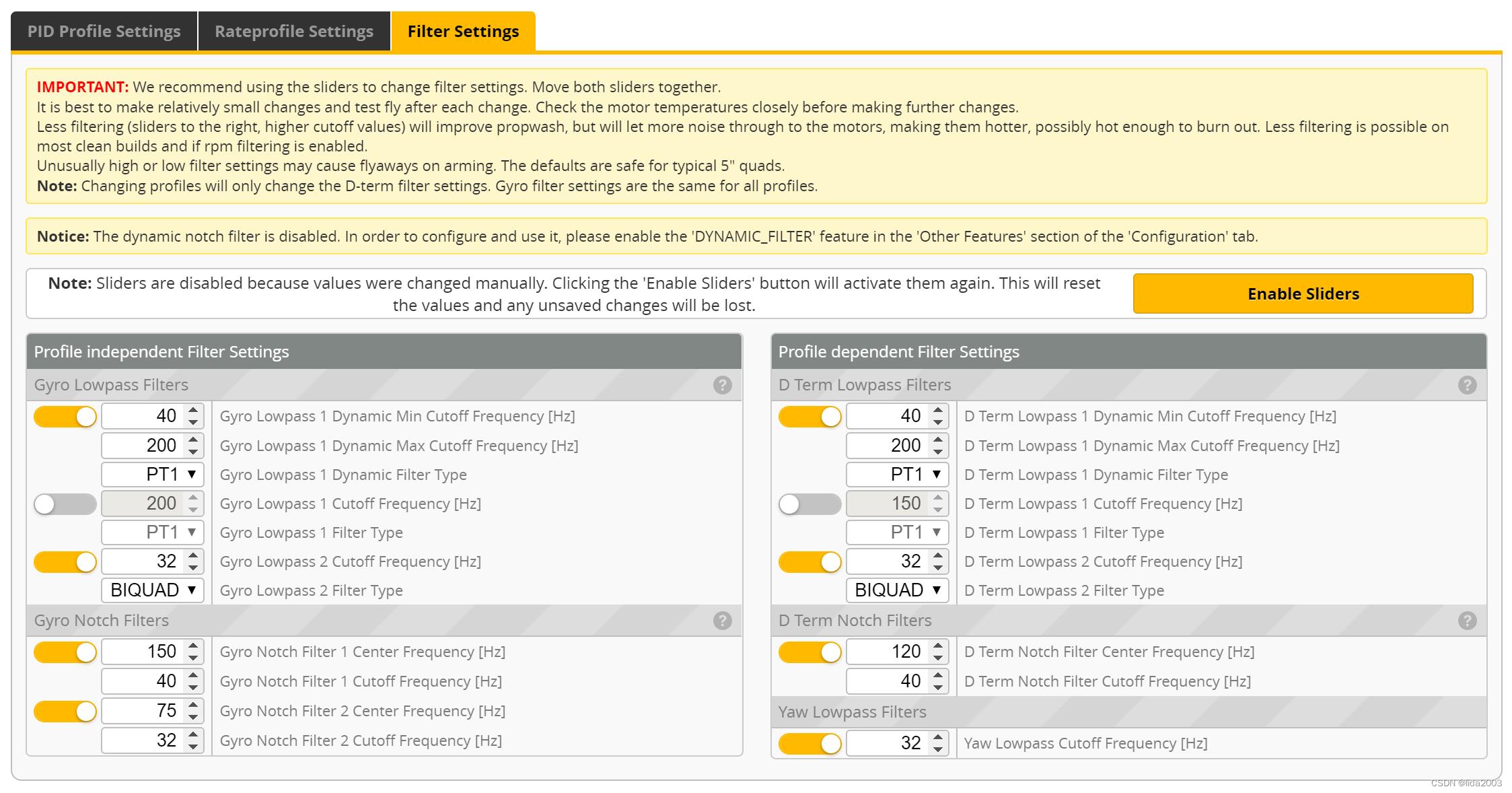
注:笔者给出的滤波参数设置是KakuteF7 AIO V1.5 在F450机架上稳定飞行的参数。该F450机架肯定是某仿冒的,低频振动80Hz、150Hz等位置都有非常高的振动。所以滤波的参数大家要根据自己拿到手的机架,特别主要进行调整。
2.2.4 HeadFree
- Roll:遥控器指向飞机方向,左右控制
- Pitch:远离/靠近遥控器
- Yaw:旋转控制
- Throttle:高度控制
参考视频:开启和关闭BetaFlight无头模式对飞行操控的影响

注:这里是笔者的一个配置,使用的是FPV,所以没有配置无头模式。
3. 后续扩展
后续大体上有两个方向拓展:
- 穿越机:摄像头 + 图传 + 接收机 + 眼镜 或 平板
- 航拍机:航拍设备 + 云台 + 图传 + 接收机 + 眼镜 或平板 + 电脑
除此之外,可能就是ROS上系统,增加伴机电脑,进阶其他复杂功能了。这里我们就不在展开,希望有机会也能成文。
4. 总结
整体来说,大机架相对来说后续可玩的方向更多点,也比较容易扩展,新增传感器,毕竟空间大点,容易改装。
如果是动手能力相对弱,或者还是注重飞行体验的朋友,建议入手套机。
以上是关于BetaFlight & BeeRotorF3 四轴飞行器配置F450的主要内容,如果未能解决你的问题,请参考以下文章