机器人控制器编程实践指导书旧版-实践七 无线通信(网络)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人控制器编程实践指导书旧版-实践七 无线通信(网络)相关的知识,希望对你有一定的参考价值。
适用于UNO/2560/DUE/ESP8266/ESP32,2021年之前使用版本。

7.1 实践目的
- 运用Arduino[ESP32]单片机和手机蓝牙控制LED灯和电机等,获取传感器信息。
7.2 实践设备
- PC机一台
- Arduino[ESP32]开发板及配件等
- 万用表和示波器等
7.3 实践原理
初级:无
中级:
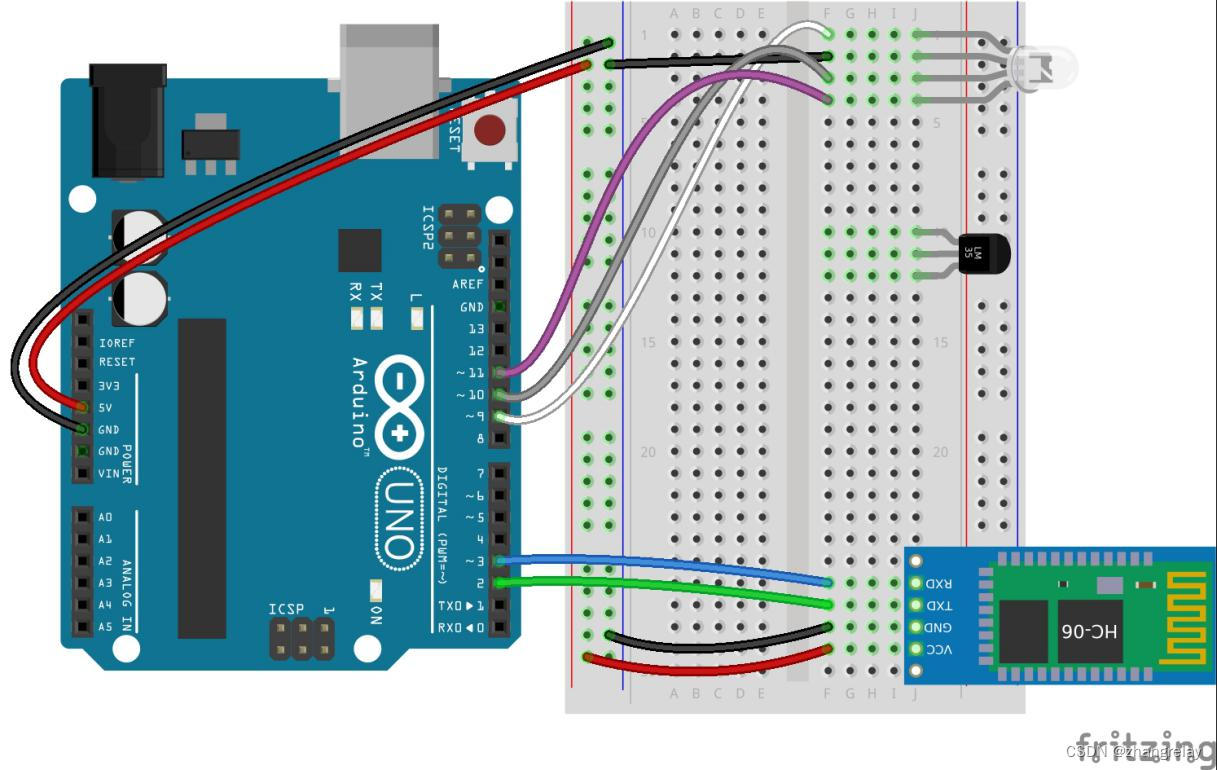
示意图
高级(ROS选修):
使用蓝牙在电脑端显示传感器数据并将控制量发送给Arduino[ESP32]单片机。
7.4 实践内容
阅读7.3中示意图、原理图和代码,在Arduino[ESP32]平台上完成实践。
7.5 实践问题
无线通信相比有线通信有哪些优势和劣势?
无线通信:无线通信是指不需要物理连接线的通信,即利用电磁波信号可以在自由空间中传播的特征进行信息交换的一种通信方式。
优点与缺点:无线通信设备最大优点就是环境,不需要受线的限制,具有一定的移动性,可以在移动状态下通过无线连接进行通信,施工难度低,成本低;但无线通信设备抗干扰较弱,传输速率较慢,带宽有限,传输距离也有限制,费用低。但是无线通信正在改变相应的技术让传输速率更高(802,11n的速率能到达100Mbps不低于有线通信),更稳定方便,所以无线通信设备将是发展趋势。
7.6 实践总结
回顾本次实践,遇到哪些问题,如何解决,经验和启发有哪些?
void setup()
Serial.begin(115200);
SexialBT. begin("ESP32test");
Serial.println("The device started,now you can pair it with bluetooth!");
void loop()
if (Serial.available())
SeialBT. write (Serial. read ());
if (SexialBT.available())Serial.write (SexialBT. read ()) ;
delay (20) ;
这里面的 Serial.read() 是读取手机发送的数据。也就是用来接收数据的,使用Arduino 上传它。然后,应该看到手机切换RGB-LED灯效果。
| 评分:
|
Arduino Uno 是整个 Arduino 家族当中使用最为广泛、文档最为齐全的一款硬件产品,基于 Microchip 微芯公司的 8 位 AVR 单片机 ATmega328P,工作电压为5V,采用16MHz的无源谐振器,并拥有32 KB的 Flash 存储器(其中0.5KB用于Bootloader程序),以及2KB的 SRAM 和1KB的 EEPROM。
Arduino Mega 2560开发板基于ATmega2560微控制器,与 Uno 上采用的 ATmega328P 同属 8 位 AVR 微控制器,其工作电压同为5V,采用的时钟频率为16MHz,拥有256KB容量的 Flash 存储器(其中8KB用于 Bootloader),8KB大小的 SRAM,4KB容量的 EEPROM。
Arduino Due 开发板基于 Atmel SAM3X8E ARM Cortex-M3 CPU 微控制器,工作电压为3.3V,采用的时钟晶振频率为84 MHz,拥有512KB的 Flash 存储器,以及96KB的 SRAM(分为64KB和32KB两个Bank)。作为第一款基于 32 位 ARM 内核微控制器的 Arduino 开发板,板载 54 个数字输入/输出引脚(其中 12 个可用于 PWM 输出),12 个模拟输出,4 个硬件串行接口,其引脚分布基本与 Arduino Mega 2560 保持一致。
Wemos D1是一款基于上海乐鑫科技的 WIFI 芯片 ESP8266 的仿 Arduino Uno 开发板,通过Arduino core for ESP8266 WiFi chip 开源项目为 Arduino 环境提供了对 ESP8266 芯片的支持。
特性:基于ESP-8266EX
Arduino兼容,使用Arduino IDE编程
- 11 x I\\O引脚
- 1 x ADC引脚(输入范围0~3.3V)
- 板载5V 1A开关电源(高输入电压24V)
以上是关于机器人控制器编程实践指导书旧版-实践七 无线通信(网络)的主要内容,如果未能解决你的问题,请参考以下文章