ROS2机器人f1tenth之CLI工具基础
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS2机器人f1tenth之CLI工具基础相关的知识,希望对你有一定的参考价值。
案例适用于ROS2如下三个版本:
- humble
- galactic
- foxy
适用于win/linux/macos。
为何选择f1tenth,延续性,之前使用f1tenth的ros1进行案例讲解。
具体可以参考如下链接:
蓝桥ROS之f1tenth简单PID沿墙跑起来(Python)
ROS2基础教程可以参考:
课程教程迭代更新只有进行时,没有完成时。
f1tenth资源需求量非常小,适合课程教学,并无缝支持云端实践,以此为主。
善于使用各类帮助文档,例如:
ros2 -h
命令会列出所有ros2的CLI命令:
zhangrelay@LAPTOP-5REQ7K1L:~$ ros2 -h
usage: ros2 [-h] [--use-python-default-buffering] Call `ros2 <command> -h` for more detailed usage. ...
ros2 is an extensible command-line tool for ROS 2.
options:
-h, --help show this help message and exit
--use-python-default-buffering
Do not force line buffering in stdout and instead use the python default buffering, which
might be affected by PYTHONUNBUFFERED/-u and depends on whatever stdout is interactive or not
Commands:
action Various action related sub-commands
bag Various rosbag related sub-commands
component Various component related sub-commands
daemon Various daemon related sub-commands
doctor Check ROS setup and other potential issues
interface Show information about ROS interfaces
launch Run a launch file
lifecycle Various lifecycle related sub-commands
multicast Various multicast related sub-commands
node Various node related sub-commands
param Various param related sub-commands
pkg Various package related sub-commands
run Run a package specific executable
security Various security related sub-commands
service Various service related sub-commands
topic Various topic related sub-commands
wtf Use `wtf` as alias to `doctor`
Call `ros2 <command> -h` for more detailed usage.默认系统环境导入:
source /opt/ros/humble/setup.bash
自定义功能包环境导入,在对应文件夹下:
~/ros_ws/f1tenth_gym_ros$ source install/setup.sh
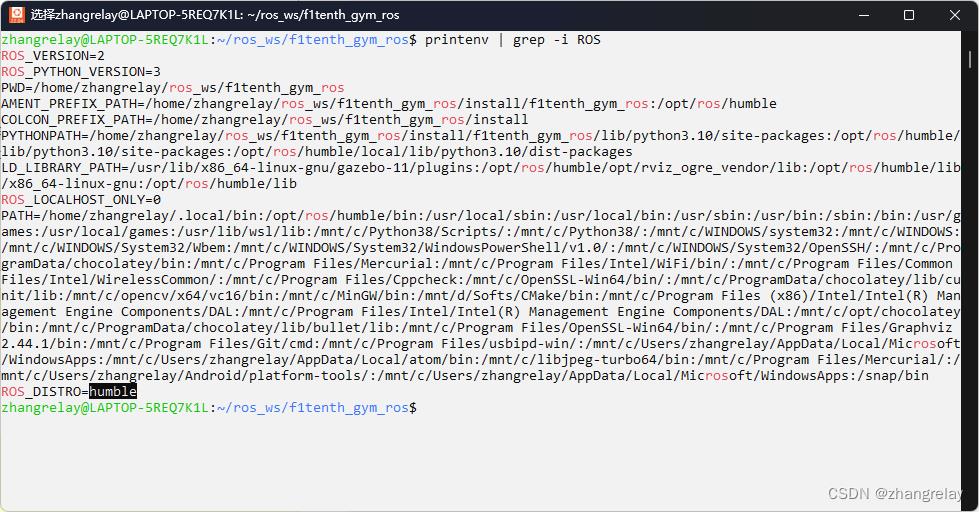
查看系统变量:
printenv | grep -i ROS
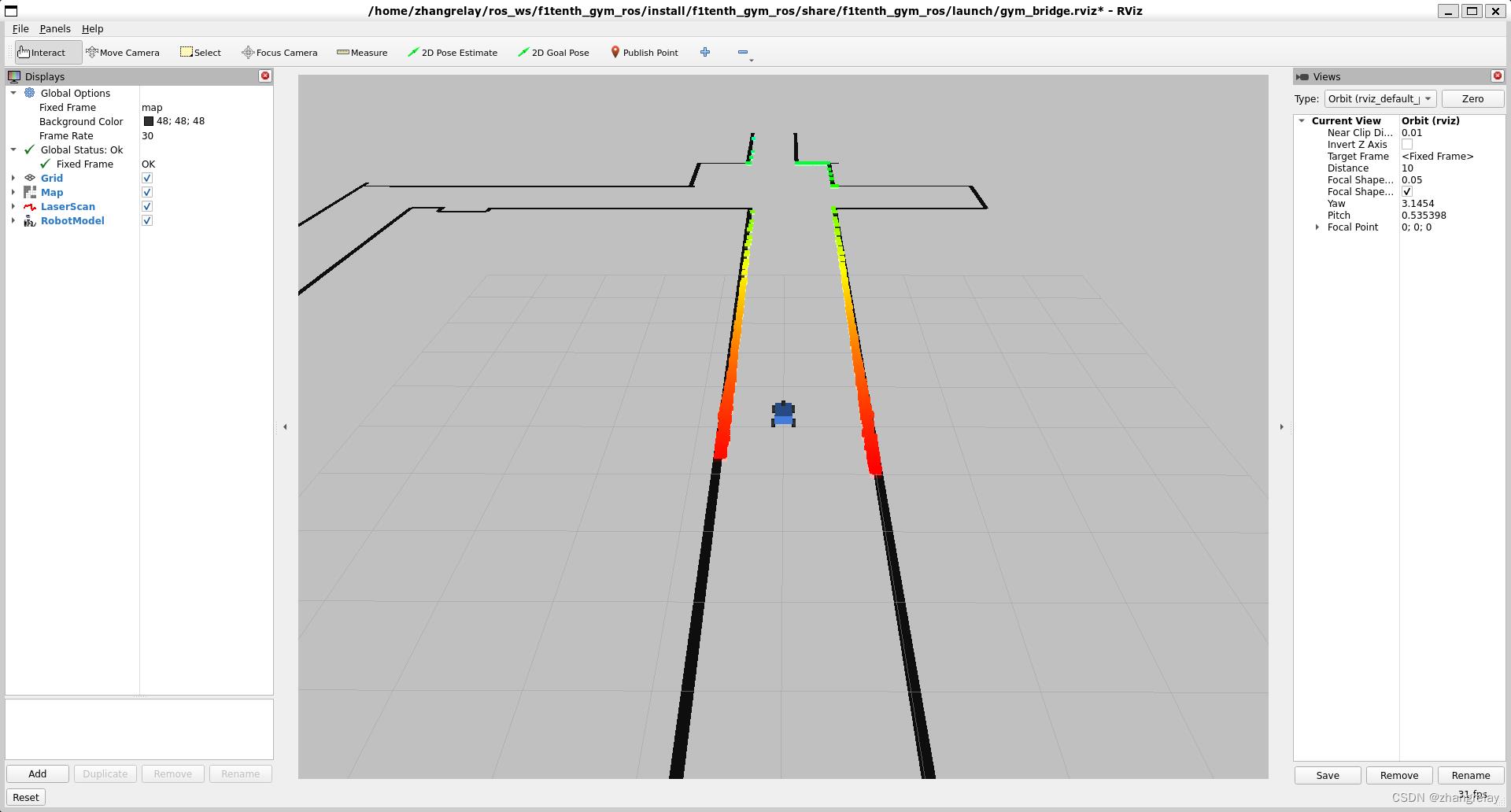
使用F1tenth和rqt:
~/ros_ws/f1tenth_gym_ros$ ros2 launch f1tenth_gym_ros gym_bridge_launch.py
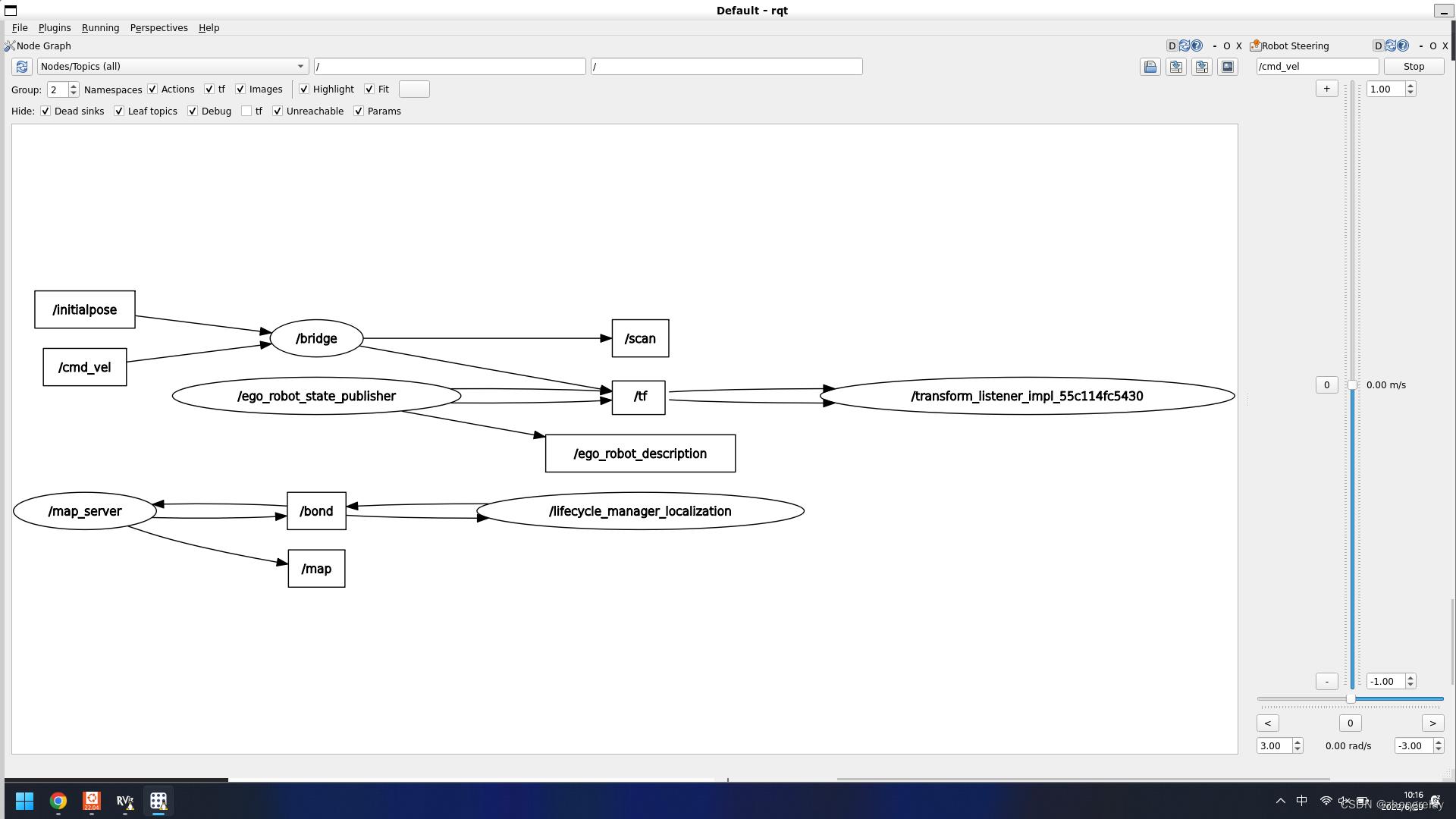
试一试如下命令:
- ros2 node list
- ros2 topic list
- ros2 service list
- ros2 action list
zhangrelay@LAPTOP-5REQ7K1L:~$ ros2 topic list
/bond
/clicked_point
/clock
/cmd_vel
/diagnostics
/drive
/ego_racecar/odom
/ego_robot_description
/goal_pose
/initialpose
/joint_states
/map
/map_server/transition_event
/map_updates
/parameter_events
/rosout
/scan
/tf
/tf_static
zhangrelay@LAPTOP-5REQ7K1L:~$ ros2 service list
/bridge/describe_parameters
/bridge/get_parameter_types
/bridge/get_parameters
/bridge/list_parameters
/bridge/set_parameters
/bridge/set_parameters_atomically
/ego_robot_state_publisher/describe_parameters
/ego_robot_state_publisher/get_parameter_types
/ego_robot_state_publisher/get_parameters
/ego_robot_state_publisher/list_parameters
/ego_robot_state_publisher/set_parameters
/ego_robot_state_publisher/set_parameters_atomically
/lifecycle_manager_localization/describe_parameters
/lifecycle_manager_localization/get_parameter_types
/lifecycle_manager_localization/get_parameters
/lifecycle_manager_localization/is_active
/lifecycle_manager_localization/list_parameters
/lifecycle_manager_localization/manage_nodes
/lifecycle_manager_localization/set_parameters
/lifecycle_manager_localization/set_parameters_atomically
/map_server/change_state
/map_server/describe_parameters
/map_server/get_available_states
/map_server/get_available_transitions
/map_server/get_parameter_types
/map_server/get_parameters
/map_server/get_state
/map_server/get_transition_graph
/map_server/list_parameters
/map_server/load_map
/map_server/map
/map_server/set_parameters
/map_server/set_parameters_atomically
/rviz/describe_parameters
/rviz/get_parameter_types
/rviz/get_parameters
/rviz/list_parameters
/rviz/set_parameters
/rviz/set_parameters_atomically
zhangrelay@LAPTOP-5REQ7K1L:~$ ros2 node list
/bridge
/ego_robot_state_publisher
/lifecycle_manager_localization
/map_server
/rviz
/transform_listener_impl_55c114fc5430
zhangrelay@LAPTOP-5REQ7K1L:~$ ros2 action listrqt 或 rqt --force-discover
rqt --help
usage: main.py [-b BINDING] [--clear-config] [-f] [--force-discover] [-h] [-ht] [-l] [-p PERSPECTIVE]
[--perspective-file PERSPECTIVE_FILE] [--reload-import] [-s PLUGIN] [-t] [-v]
[--args [PLUGIN_ARGS ...]] [--list-perspectives] [--list-plugins] [--command-pid PID]
[--command-start-plugin PLUGIN] [--command-switch-perspective PERSPECTIVE]Options for GUI instance:
-b BINDING, --qt-binding BINDING
choose Qt bindings to be used [pyqt|pyside]
--clear-config clear the configuration (including all perspectives and plugin settings)
-f, --freeze-layout freeze the layout of the GUI (prevent rearranging widgets, disable undock/redock)
--force-discover force a rediscover of plugins
-h, --help show this help message and exit
-ht, --hide-title hide the title label, the icon, and the help button (combine with -l and -f to eliminate the
entire title bar and reclaim the space)
-l, --lock-perspective
lock the GUI to the used perspective (hide menu bar and close buttons of plugins)
-p PERSPECTIVE, --perspective PERSPECTIVE
start with this named perspective
--perspective-file PERSPECTIVE_FILE
start with a perspective loaded from a file
--reload-import reload every imported module
-s PLUGIN, --standalone PLUGIN
start only this plugin (implies -l). To pass arguments to the plugin use --args
-t, --on-top set window mode to always on top
-v, --verbose output qDebug messages
--args [PLUGIN_ARGS ...]
arbitrary arguments which are passes to the plugin (only with -s, --command-start-plugin or
--embed-plugin). It must be the last option since it collects all following options.Options to query information without starting a GUI instance:
These options can be used to query information about valid arguments for various options.--list-perspectives list available perspectives
--list-plugins list available pluginsOptions to operate on a running GUI instance:
These options can be used to perform actions on a running GUI instance.--command-pid PID pid of the GUI instance to operate on, defaults to oldest running GUI instance
--command-start-plugin PLUGIN
start plugin
--command-switch-perspective PERSPECTIVE
switch perspectiveSpecial options for embedding widgets from separate processes:
These options should never be used on the CLI but only from the GUI code itself.
---
以上是关于ROS2机器人f1tenth之CLI工具基础的主要内容,如果未能解决你的问题,请参考以下文章