PX4开发环境搭建--模拟器编译
Posted lida2003
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PX4开发环境搭建--模拟器编译相关的知识,希望对你有一定的参考价值。
PX4开发环境搭建--模拟器编译
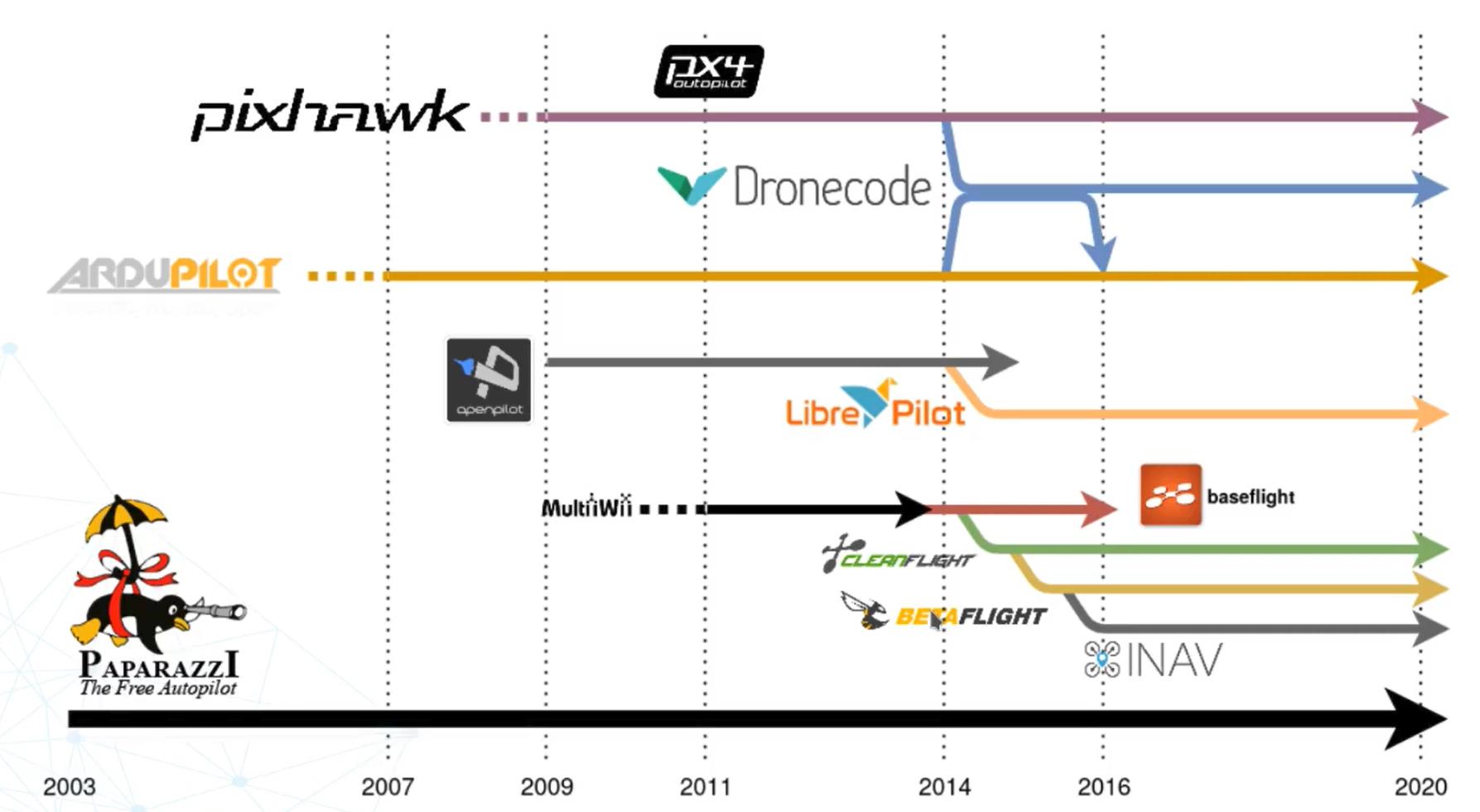
之前我们在做BetaFlight开源工程结构简明介绍的时候,有过一张开源飞控的介绍图谱。
从这张图谱我们看到基本上有5条轴线:
- Pixhawk // PX4
- Ardupilot
- OpenPilot
- MultiWii // baseflight/cleanflight/betaflight
- Paparazzi
BaseFlight/CleanFlight/BetaFlight目前在穿越机上的应用比较广泛。穿越机通常是小型机,比如:5寸以下。且整体起飞重量都比较轻,置空时间通常也就10分钟~30分钟范围。
航拍,无人巡航的角度,不是仅仅RC控制,更多功能需要通过地面站的接入处理。从这个角度来说,PX4就有很好的优势(这篇文章主要是介绍PX4,其他当然也有很好的Paparazzi等)。
1. PX4开发环境介绍
整个PX4开发环境可以用于非常多的实例:
- Pixhawk和NuttX-based硬件
- jMAVSim 仿真
- Gazebo 仿真
- Raspberry Pi
- ROS (Robotics Operating System)
- Fast DDS - Required for ROS2
注:这里主要介绍基于Ubuntu 20.04 LTS (Focal Fossa)的搭建。
2. PX4开发环境搭建
2.1代码下载
$ git clone https://github.com/PX4/PX4-Autopilot.git --recursive
2.2 国内环境调整
这些东西都是国外的,国内整体情况(比如:网络等)不理想,因此需要做一些调整。
- 调整ubuntu本地apt升级路径:aliyun
$ sudo vi /etc/apt/sources.list
# deb cdrom:[Ubuntu 20.04.2.0 LTS _Focal Fossa_ - Release amd64 (20210209.1)]/ focal main restricted
# See http://help.ubuntu.com/community/UpgradeNotes for how to upgrade to
# newer versions of the distribution.
deb http://mirrors.aliyun.com/ubuntu/ focal main restricted
## Major bug fix updates produced after the final release of the
## distribution.
deb http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted
## N.B. software from this repository is ENTIRELY UNSUPPORTED by the Ubuntu
## team. Also, please note that software in universe WILL NOT receive any
## review or updates from the Ubuntu security team.
deb http://mirrors.aliyun.com/ubuntu/ focal universe
# deb-src http://hk.archive.ubuntu.com/ubuntu/ focal universe
deb http://mirrors.aliyun.com/ubuntu/ focal-updates universe
# deb-src http://hk.archive.ubuntu.com/ubuntu/ focal-updates universe
## N.B. software from this repository is ENTIRELY UNSUPPORTED by the Ubuntu
## team, and may not be under a free licence. Please satisfy yourself as to
## your rights to use the software. Also, please note that software in
## multiverse WILL NOT receive any review or updates from the Ubuntu
## security team.
# deb-src http://hk.archive.ubuntu.com/ubuntu/ focal multiverse
# deb-src http://hk.archive.ubuntu.com/ubuntu/ focal-updates multiverse
## N.B. software from this repository may not have been tested as
## extensively as that contained in the main release, although it includes
## newer versions of some applications which may provide useful features.
## Also, please note that software in backports WILL NOT receive any review
## or updates from the Ubuntu security team.
deb http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe
## Uncomment the following two lines to add software from Canonical's
## 'partner' repository.
## This software is not part of Ubuntu, but is offered by Canonical and the
## respective vendors as a service to Ubuntu users.
# deb http://archive.canonical.com/ubuntu focal partner
# deb-src http://archive.canonical.com/ubuntu focal partner
deb http://mirrors.aliyun.com/ubuntu/ focal-security main restricted
deb http://mirrors.aliyun.com/ubuntu/ focal-security universe
# deb-src http://security.ubuntu.com/ubuntu focal-security universe
# deb-src http://security.ubuntu.com/ubuntu focal-security multiverse
# This system was installed using small removable media
# (e.g. netinst, live or single CD). The matching "deb cdrom"
# entries were disabled at the end of the installation process.
# For information about how to configure apt package sources,
# see the sources.list(5) manual.
- 调整python3本地pip升级路径:tsinghua
diff --git a/Tools/setup/ubuntu.sh b/Tools/setup/ubuntu.sh
index 25c12cb170..8bdc7ae910 100755
--- a/Tools/setup/ubuntu.sh
+++ b/Tools/setup/ubuntu.sh
@@ -105,10 +105,10 @@ echo
echo "Installing PX4 Python3 dependencies"
if [ -n "$VIRTUAL_ENV" ]; then
# virtual envrionments don't allow --user option
- python -m pip install -r $DIR/requirements.txt
+ python -m pip install -i https://pypi.tuna.tsinghua.edu.cn/simple -r $DIR/requirements.txt
else
# older versions of Ubuntu require --user option
- python3 -m pip install --user -r $DIR/requirements.txt
+ python3 -m pip install -i https://pypi.tuna.tsinghua.edu.cn/simple --user -r $DIR/requirements.txt
fi
# NuttX toolchain (arm-none-eabi-gcc)
2.3 建立ubuntu开发环境
$ bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
注:如果缺少2.2步骤,将会遇到非常多莫名其妙的问题,大体还是网络问题。
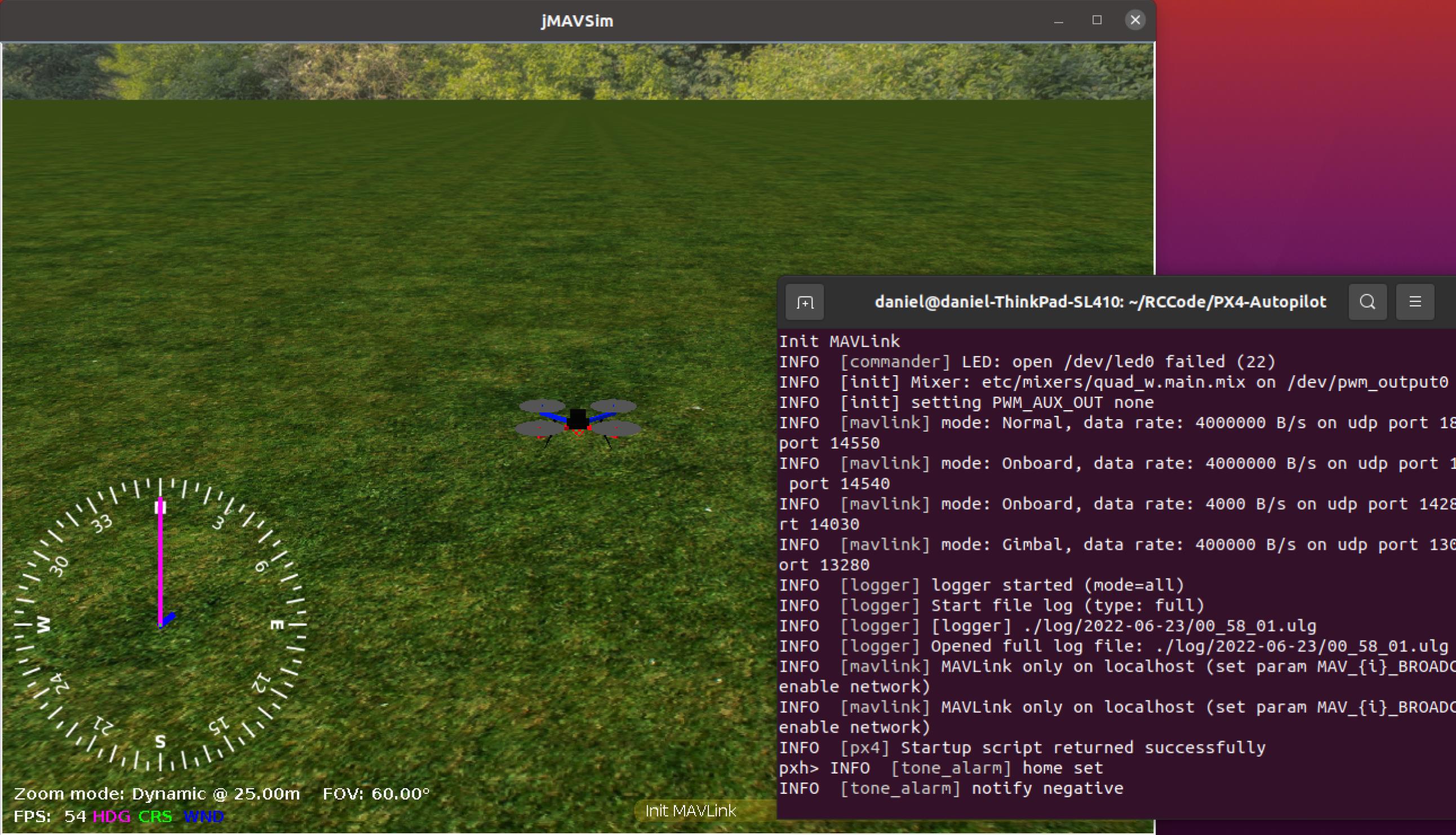
2.4 构建jMAVSim仿真
$ make px4_sitl jmavsim
2.5 补充版本信息
目前,使用git最新版本:
commit ffb0097052227e1b7dc2665463b6b9de33bbf835 (HEAD -> master, origin/master, origin/HEAD)
Author: CR <christopher.ruwisch@tu-berlin.de>
Date: Wed Jun 22 21:50:30 2022 +0200
removed unused code - _constrainOneSide and _constrainAbs
这个版本在实际使用过程存在一个问题,当2.4编译成功后,无法看到模拟GUI界面,主要是缺少ant组件,导致脚本jmavsim_run.sh的73行代码无法执行。
PX4-Autopilot/Tools/jmavsim_run.sh +73
ant create_run_jar copy_res
所以请确认ant是否已经安装:
$ sudo apt-get install ant
3. jmavsim仿真环境
3.1 仿真命令集
仿真环境下支持的命令列表如下:
pxh> help
Builtin Commands:
actuator_test
airship_att_control
airspeed_selector
attitude_estimator_q
battery_simulator
camera_feedback
camera_trigger
cdev_test
commander
commander_tests
control_allocator
controllib_test
dataman
dyn
ekf2
ex_fixedwing_control
failure
fake_gps
fake_imu
fake_magnetometer
flight_mode_manager
fw_att_control
fw_autotune_attitude_control
fw_pos_control_l1
gimbal
gps
gyro_calibration
gyro_fft
hello
hrt_test
land_detector
landing_target_estimator
led_control
list_files
list_tasks
listener
load_mon
local_position_estimator
logger
mag_bias_estimator
manual_control
mavlink
mavlink_tests
mc_att_control
mc_autotune_attitude_control
mc_hover_thrust_estimator
mc_pos_control
mc_rate_control
mixer
motor_test
navigator
param
perf
pwm
pwm_out_sim
px4_mavlink_debug
px4_simple_app
rc_tests
rc_update
replay
rover_pos_control
rover_steering_control
rpm_simulator
sd_bench
send_event
sensor_baro_sim
sensor_gps_sim
sensor_mag_sim
sensors
shutdown
sih
simulator
sleep
system_time
temperature_compensation
tests
tone_alarm
tune_control
uorb
uorb_tests
uuv_att_control
uuv_example_app
uuv_pos_control
ver
vtol_att_control
work_item_example
work_queue
wqueue_test
3.2 命令实例
举例:
commander takeoff //起飞
commander land //降落
注:由于我的遥控器距离有问题,去维修了(四轴飞控DIY集成FPV功能),所以没法实际操作。后续有时间再做更新!!!
以上是关于PX4开发环境搭建--模拟器编译的主要内容,如果未能解决你的问题,请参考以下文章