坐标系统·番外篇
Posted zssure
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了坐标系统·番外篇相关的知识,希望对你有一定的参考价值。
题记:
DICOM世界观·第一章 坐标系统完成后,总感觉缺了点什么,大概有两个原因:第一,没有从基础概念说起,来形象的介绍坐标系间的各种变换;第二,没有深入到DICOM数据本身,来进行实例演示。这两方面的介绍都停留在半山腰,让读者似懂非懂或一知半解。为此近期重新翻阅了一下经典著作 《Introduction to Linear Algebra, Fifth Edition(2016)》,以及相关维基百科资料。虽不能完全将书中理念呈现于此篇博文,但还是希望能够对上文有一点补充,能够更清晰、形象的给大家一个展示,为后续DICOM的相关数据操作打下坚持的基础。所以本篇记做 DICOM世界观 第一章 坐标系统·番外篇。

第一章 坐标系统·番外篇
1.4 变换
日常生活中我们切身体会的“变换”有平移、缩放、旋转、挤压(这个可以想象一个正方形的边框,用力挤压任意一个顶点后会变成平行四边形的场景)、扭曲等等。通过这些变换我们可以将一个物体(备注:这里不一定指的是一个真真切切的实体,可能是一个图形或图像)变成我们想要的样子。更复杂的情况参见下图演示的Photoshop中的几种变换(快捷键:Ctrl+T):
1.4.1 线性变换
在日常的变换中,线性变换最被我们所熟知。用数学的语言来描述线性变换(在wiki百科中,线性映射linear map、线性变换linear transformation、线性函数linear function在某些情况下所表达的意思相同)拥有以下特性:
- 加法闭合:
-
f(u+v)=f(u)+f(v),可扩展为f(c1v1+c2v2+c3v3+...+cnvn)=c1f(v1)+c2f(v2)+c3f(v3)+...+cnf(vn)
-“数”乘闭合:
f(cu)=c(fu)
上述两个定律满足闭合的意思指的是“上述两种变换的结果与变换之前的值同属于一个坐标系空间”。言外之意可以简单的理解为:变换前后直线依然是直线,直线彼此间的比例不变,且相对的坐标原点固定不变。(详情参考知乎马同学的介绍如何通俗的解释仿射变换)
用矩阵形式(这里仅用二维空间的变换来演示)来表示线性变化大致有以下几种情况(参见wiki百科linear map):
(1)旋转:rotation
上述矩阵表示旋转任意角度
θ
,例如旋转90°矩阵为:
用matlab进行演示:
%旋转角度为30度,即pi/6
r1 =
0.8660 -0.5000
0.5000 0.8660
%旋转角度(默认正方向是逆时针)为90度,即pi/2
r2 =
0 -1
1 0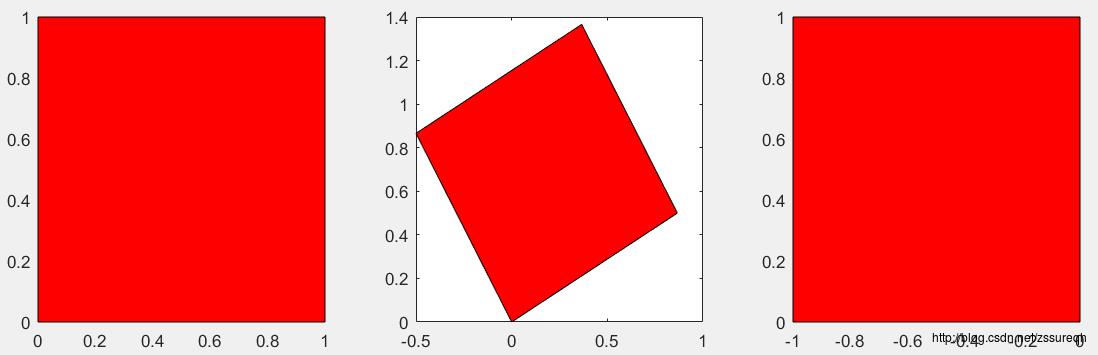
(2)缩放:scaling
两个坐标轴的缩放比例分别为x为缩放比例等于a,y缩放比例等于b。例如下图一个是等比例扩大两倍,一个是X与Y轴扩大不同倍数。
ss =
2 0
0 2
ss2 =
3 0
0 2
(3)剪切:shear
10m1
或
1m01
两种情况分别表示裁切的方向沿着x轴(因为左乘运算时保持y不变)和y轴(因为左乘运算时保持x不变),例如m=2时,
s1 =
1 2
0 1
s2 =
1 0
2 1
(4)挤压:squeeze
或
1/k00k
当k=2时

(5)投影:projection
0001
或
1000
分别表示投影到y轴和投影到x轴,例如:

(6)反射:reflection
或
1以上是关于坐标系统·番外篇的主要内容,如果未能解决你的问题,请参考以下文章