i.MX6ULL驱动开发 | 16 - 基于 UART 驱动框架发送/接收串口数据
Posted Mculover666
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了i.MX6ULL驱动开发 | 16 - 基于 UART 驱动框架发送/接收串口数据相关的知识,希望对你有一定的参考价值。
i.MX6ULL在SOC级别的UART外设驱动已经由原厂编写好了,我们只需要在设备树中添加对应的节点即可使用。
一、在设备树添加节点
1. 设置UART3引脚
在iomucx节点中添加uart3子节点:
pinctrl_uart3: uart3grp
fsl,pins = <
MX6UL_PAD_UART3_TX_DATA__UART3_DCE_TX 0x1b0b1
MX6UL_PAD_UART3_RX_DATA__UART3_DCE_RX 0x1b0b1
>;
;
检查一下这两个引脚有没有被使用。
已经被uart2用作rts和cts引脚,给它干掉:


2. 添加uart3节点
&uart3
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_uart3>;
status = "okay";
;
3. 测试是否生成设备文件
重新编译设备树:
make dtbs
使用新的设备树启动,查看是否生成对应的串口设备文件:
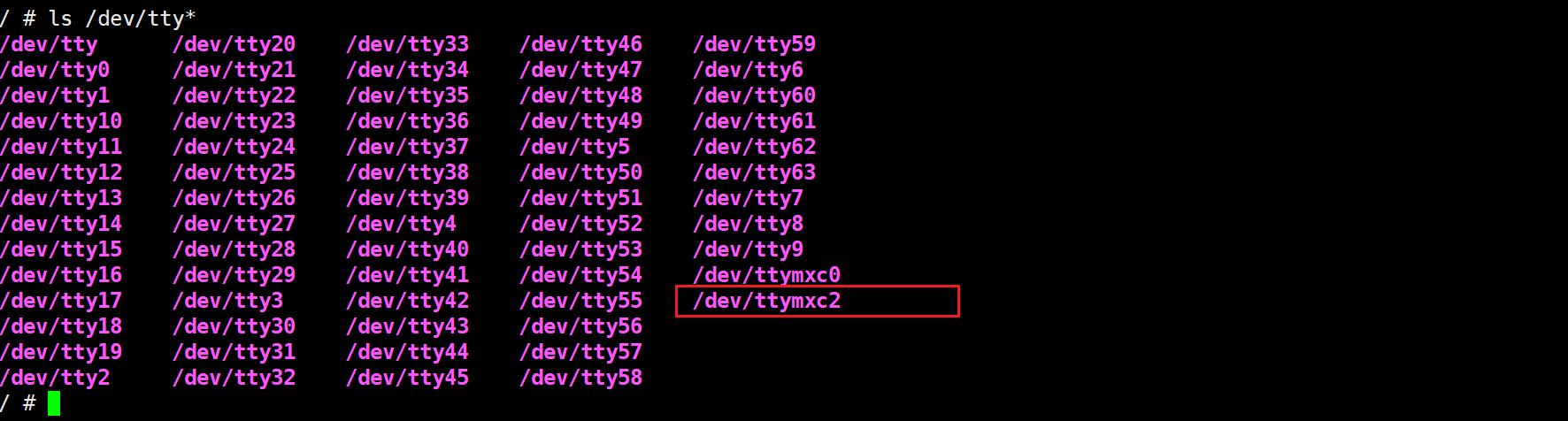
可以看到,系统已经有ttymxc2这个串口设备口,对应UART3,应用程序可以通过访问此设备实现对UART3的操作。
二、编写串口测试程序
Linux UART应用编程参考文章:Linux下串口收发通信。
#include <stdio.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdint.h>
#include <termios.h>
#include <string.h>
int uart_setup(int fd)
struct termios newtio;
// 获取原有串口配置
if (tcgetattr(fd, &newtio) < 0)
return -1;
// 修改控制模式,保证程序不会占用串口
newtio.c_cflag |= CLOCAL;
// 修改控制模式,能够从串口读取数据
newtio.c_cflag |= CREAD;
// 不使用流控制
newtio.c_cflag &= ~CRTSCTS;
// 设置数据位
newtio.c_cflag &= ~CSIZE;
newtio.c_cflag |= CS8;
// 设置奇偶校验位
newtio.c_cflag &= ~PARENB;
newtio.c_iflag &= ~INPCK;
// 设置停止位
newtio.c_cflag &= ~CSTOPB;
// 设置最少字符和等待时间
newtio.c_cc[VTIME] = 1;
newtio.c_cc[VMIN] = 1;
// 修改输出模式,原始数据输出
newtio.c_oflag &= ~OPOST;
newtio.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG);
// 设置波特率
cfsetispeed(&newtio, B115200);
cfsetospeed(&newtio, B115200);
// 清空终端未完成的数据
tcflush(fd,TCIFLUSH);
// 设置新属性
if(tcsetattr(fd, TCSANOW, &newtio) < 0)
return -1;
return 0;
int uart_send(int fd, char *buf, int len)
int count;
count = write(fd, buf, len);
return count == len ? len : -1;
int main(int argc, char *argv[])
int fd;
int ret;
int count = 100;
char send_buf[] = "Hello World!\\r\\n";
if (argc != 2)
printf("usage: ./test_uart [device]\\n");
return -1;
/* 打开串口 */
fd = open(argv[1], O_RDWR | O_NOCTTY | O_NDELAY);
if (fd < 0)
printf("open dev fail!\\n");
return -1;
/* 设置串口 */
ret = uart_setup(fd);
if (ret < 0)
printf("uart setup fail!\\n");
close(fd);
return -1;
while (count--)
ret = uart_send(fd, send_buf, strlen(send_buf));
if (ret < 0)
printf("send fail!\\n");
else
printf("send ok!\\n");
sleep(2);
close(fd);
编译:
arm-linux-gnueabihf-gcc test_uart.c -o test_uart
运行:
./test_uart /dev/ttymxc2
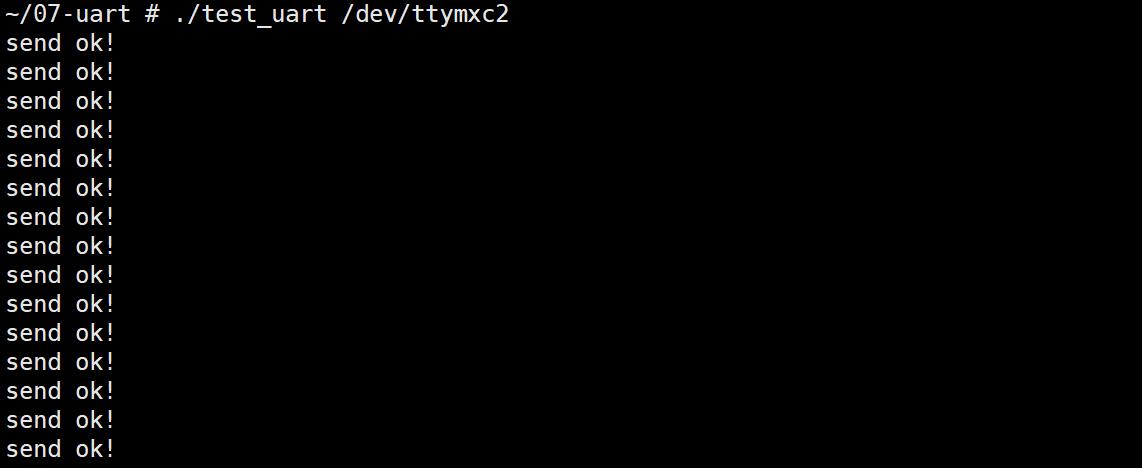
再看看另一侧的串口终端是否收到数据:

以上是关于i.MX6ULL驱动开发 | 16 - 基于 UART 驱动框架发送/接收串口数据的主要内容,如果未能解决你的问题,请参考以下文章
i.MX6ULL驱动开发 | 08 -基于pinctrl子系统和gpio子系统点亮LED
i.MX6ULL驱动开发 | 08 -基于pinctrl子系统和gpio子系统点亮LED
i.MX6ULL驱动开发 | 09 -基于Linux自带的LED驱动点亮LED
i.MX6ULL驱动开发 | 34 - 基于SPI框架驱动spi lcd(st7789)