自动驾驶的第一性原理:特斯拉与毫末智行“求同存异”?
Posted 智能相对论
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶的第一性原理:特斯拉与毫末智行“求同存异”?相关的知识,希望对你有一定的参考价值。
作者 | 海怪
对于2019年,一位互联网大佬这样评价:这是过去十年当中最差的一年,却是未来十年最好的一年。
但对于智能驾驶产业来说,2019年是走出第一次产业低谷的第一年,也是可以预计的产业繁荣的新十年的开端。
在黑天鹅与灰犀牛齐飞,新技术与新产业共生的当下,我们很容易想起《双城记》开头的一句“这是一个最好的时代,也是一个最坏的时代”。
时代冷暖,要看你所站立的位置。
来到2022年,疫情的阴霾仍未散去,而疫情对于全世界经济生活的影响,恐怕要延续到未来很长时间。因为疫情导致的居家隔离,使得线上数字消费和社交占据越来越大的比重。公共交通出行也变得小心翼翼,私家车出行成为防疫安全的最小单元。
伴随着新能源革命同时到来的智能驾驶变革,其所许诺的更安全、更高效的人机共驾以及更具解放意义的无人驾驶出行,正在成为后疫情时代的主流形态。
众所周知,智能驾驶肇始于21世纪初的一场无人驾驶挑战赛,过程中因为自动驾驶技术的突破和其极具想象的市场前景,使得像Google这样的科技公司倾注全力去投入,随后也有像特斯拉这样以颠覆式创新闻名的电动汽车企业将智能驾驶变成汽车业的标配。
(十年前爱答不理,十年后高攀不起)
智能汽车,像移动互联网时代的“智能手机”一样,成为智能时代的标志性符号。不过,智能驾驶的到来并不会是水到渠成的,反而因其本身技术实现的难度,关涉人身安全导致的复杂博弈,以及产业成长的长周期,使其从始至终都饱受质疑和严格审视。
放眼全球,我们可以看到以Waymo为代表的坚定走Robotaxi路线的L4玩家正踟蹰不前,而以特斯拉为代表的走辅助驾驶跨越到自动驾驶的L2玩家正高歌猛进。

而在中国的智能驾驶产业版图中,我们能看到不同技术路线下的所有组合。有从L4降维至L2,两条腿同时走路的早期玩家Apollo,也有坚定跟随特斯拉的蔚小理等造车新势力们,还有从限定场景下,比如从实现难度较小的干线物流、封闭园区、低速物流等场景出发的一众创业企业们。
在如此多的智能驾驶的创新模式下,我们该如何才能看清智能驾驶的前途未来?
在众多智能驾驶的玩家里,我们找到了一家非常有代表性的创业公司——毫末智行,一家既有科技研发基因又有传统主机厂造车基因的“混搭”型玩家,同时也在智能驾驶的赛道上,同时选择了高速、载人、民用场景的辅助驾驶和低速、载物、商用场景的无人物流。

在这样的商业模式背后,毫末智行CEO顾维灏在刚过去不久的2022HAOMO AI DAY上,公布了自己的“第一性原理”:通过数据智能,用更低的成本、更快的速度,实现自动驾驶不断升级。而在“数据智能”背后,是毫末对于智能驾驶的技术变量和产业环境的“前提假设”的洞察。
以毫末所提出的“自动驾驶第一性原理”为样本,我们可以抛开各种或乐观或悲观的无意义争论,深入到智能驾驶产业的深层结构当中,去探究智能驾驶如何得以成立的内在逻辑。
“科技创新+人类需求”:发现技术产业第一性原理的内部结构
最近几年,“第一性原理”被商业世界抬到了一个很高的位置。这仍然离不开“硅谷钢铁侠”马斯克的功劳。有一次他在接受TED采访时,大谈特谈其特斯拉汽车的成功离不开对“第一性原理”的运用。此后,“第一性原理”成为被很多商业杂志奉为圭臬的概念。

实际上,“第一性原理”是一个古早的概念,起源在两千多年前的亚里士多德。在逻辑学中,亚里士多德需要一个基本概念,来指称那些不证自明的东西。让这个概念成为逻辑推论的基本命题。他这样来解释第一性原理:“每个系统中存在一个最基本的命题,它不能被违背或删除。”
任何系统都是有边界的,所谓边界就是这个系统的前提条件,也叫前提假设。对于这个系统,这些“前提假设”会成为“不证自明”的概念和命题,而这些概念命题就是这个系统的“第一性原理”。
如何找到一个系统的“第一性原理”?往往需要通过理论假设和实践检验的漫长过程。但这一回答太抽象。
我们不妨将问题具体化:如何找到智能驾驶的“第一性原理”?
这里我们不妨引入一个“科技创新+人类需求”的逻辑模型来进行穿针引线。
在农业社会,粮食匮乏导致的人口压力是当时人们的第一需要,而通过农具革新、灌溉系统的成熟带来的种植生产效率的提升,在单位土地上养活了远古时代难以承载的人口数量。
在工业社会,丰富的商品交易和廉价的工业品成为人们提升生活品质的第一需要,工业化大生产和全球贸易能够使一个普通的工人家庭过上比中世纪封建领主更好的生活。
在现代社会,丰富的信息知识的交换和广泛的社交成为人们日常的刚需,而数字信息技术的出现为现代人触手可及的即时通信、娱乐提供了技术可能。
智能时代的到来,追求更多具有价值感意义感的智性活动和更多闲暇成为人们的刚需,而数字智能化技术将替代人进行各种事务的判断、操作,从而极大地将人们从繁重和重复的劳动中解放出来。

其中,智能驾驶成为当前既有现实社会需求,技术上又触手可及,可以被看作是接下来智能时代最典型也最具市场潜力的应用场景。
因此,作为一个系统,智能驾驶产业的边界也可以由这两个维度来界定。一个维度就是,智能驾驶技术的核心变量是什么?技术的进化逻辑是什么?成熟逻辑又是什么?另一个维度是,智能驾驶特别是无人驾驶是否是大众的一个真实需求,这个需求的内在逻辑是什么?比如说,出于安全的、便利的、社交的、精神满足的不同需求层级的权重排序是什么?需求的满足周期又是什么?
而这些问题,需要我们深入探讨。
从“科技创新+人类需求”模型,校准智能驾驶的第一性原理
在智能驾驶领域,一直存在着三条路线之争。
一个争论是自动驾驶的根本技术路线之争,即一步到位直接做L4(无人驾驶),还是从辅助驾驶开始。
一个争论是自动驾驶的产品设计路线之争,是走激光雷达+视觉+其他传感器的全感知路线,还是走只重视觉的感知路线。
还有一个争论是商业路线之争,即直接基于L4走Robotaxi,还是先做乘用车的辅助驾驶产品。
围绕这三条路线之争,目前自动驾驶产业的一众玩家们,基于自己的认知和能力,都有各自的选择。
其中,最头铁的特斯拉选择了以AI深度学习驱动自动驾驶的技术路线,产品上选择了重视觉,去激光雷达甚至毫米波雷达的产品路线,在商业路线上选择了先做乘用车辅助驾驶。这条选择从曾经的备受质疑和嘲弄的单打独斗,变成现在广受赞誉、备受看好的阳关大道。

而与之对应的,一开始风光无限,技术领先的Waymo,却卡在了商业化迟迟不能规模进展、硬件成本难以大幅降低、Robotaxi运营成本居高不下的泥潭里不能自拔。
成王败寇,虽然还未到终局。但我们不妨来总结下马斯克所理解的智能驾驶“第一性原理”。
从技术路线来说,自动驾驶的本质是让机器学会人类开车,那就需要大量的路测数据,这些数据不可能仅靠一些测试车上路就能完成,而是需要数以百万计规模的真实道路数据。私家车主在享受辅助驾驶带来的便捷出行的同时,自然也就承担了这部分道路数据采集的任务,辅助驾驶让更大规模的自动驾驶数据训练成为可能。
从产品设计来说,人类基本只靠视觉和手脚的配合就可以实现流畅的驾驶,那对于汽车来说,依靠视觉感知也可以完成自动驾驶,而不需要激光雷达、毫米波雷达这种耳听八方的设备来获取信息。特斯拉最重要的任务就是将视觉数据处理成像人一样能够瞬时理解和判断的时空环境信息。
从商业模式来说,马斯克对Robotaxi其实一直心心念念。但是无人驾驶还为时过早,无人驾驶出行的收入还不能规模化。不如老老实实卖车、卖FSD软件,把现金流搞得足足的,这样才不至于在Robotaxi的盛宴到来之前倒下。
这对于坚持搞Robotaxi的自动驾驶企业来说,早已不是什么秘密。在持续靠资本输血的Robotaxi企业,无不在发展自己的副业,也无不在跟主机厂开始抱团取暖式的合作。
从人类需求的角度出发。人类的“第一性原理”始终是,自己的劳动能外包就外包,需要做的事情能让机器代劳就绝不动手,更何况是那些枯燥乏味的事情呢?

开车正是这样一件天然值得“外包”的事情。从汽车发明后不久,车载收音机就发明了。试想,谁都希望在开车的无聊时刻干点别的,哪怕是听听音乐和收音机的广告呢?
显然,自动驾驶在代替人类开车出行上面,无疑有着巨大的需求。
但对于自动驾驶安全性的担忧,也同样是普通人的真实诉求。毕竟,没有哪个科技产品能够像自动驾驶一样,是性命攸关的。谁也不愿意自己当科技的小白鼠。所以,对于自动驾驶产品的普及来说,是放心大胆地交给一步到位的Robotaxi好呢?还是在人类自己监督下,长期处在人机共驾状态的辅助驾驶好呢?答案似乎也是不言而喻的。
对自动驾驶便利性的需要和对自动驾驶安全性的担忧,注定构成自动驾驶进入规模化应用的一条反复跳跃的约束条件。唯有技术的逐步成熟,才能打破这一屏障。
完全无人的自动驾驶是真香,但是放心大胆地咽下去之前,还得在嘴里咀嚼一段时间。
数据智能驱动自动驾驶升级:毫末所发现的“自动驾驶第一性原理”
按照一个模型去寻找系统的“第一性原理”并不是非常难的事情,但根据自己分析得出的结论去实践,甚至要打破原有的系统边界和“前提假设”,则是一件困难重重的事情。
事实上,在技术产业创新这条路上,既没有“常胜不败者”,也没有“错过机会者”,也不会是第一个尝试螃蟹者就能赢者通吃,也不会是年轻有为者就能抓住新一轮创新的风口。
创新的关键在于创新者或组织有没有深入系统进行底层逻辑思考的决心,有没有勇气直接面对系统当中存在的问题,有没有坚定的意志和决心投入资源押注到自己选定的道路上。
对于打破“第一性原理”带来的恐惧和敢于孤注一掷投入到自己认定的“第一性原理”的勇气,才是个人、企业组织取得成败的关键。在这条路上,我们见过了太多的机会主义者、逃跑主义者和瞻前顾后者。
尽管商业世界对于商业模式创新、产品创新、企业组织管理已经有着教科书般的资产积累,但是对于正在到来的新型智能产业,找到第一性原理,建立成熟的商业模式创新并不是一件一蹴而就的事情。
对于智能驾驶而言,建立能够真正能制胜未来的创新模式并不容易。
首先,人们认为智能驾驶最终一定会走向完全无人驾驶,人类出行和物流方式将完全变革。但是信心归信心,技术归技术。没人知道通向这一无人驾驶终点的时间有多长,是十年还是五十年。
其次,业内早已乐观的判定,自动驾驶已经从技术验证阶段进入到商业落地阶段,智能驾驶产业的市场空间将无比广阔。但是没人知道智能驾驶的技术成本投入到底是多少,为了保障安全的后期投入到底是多少?大规模降低智能驾驶成熟的数据成本的 “第一性原理”到底是否成立?
另外,智能驾驶所带来的交通出行方式变革,对人类经济生活、就业岗位、生活方式的变革,人们会在多长时间内接受。大众对于无人驾驶所许诺的安全性的接纳是否向对智能手机的接纳一样在短短几年之内就完成?
对于这些问题,自然不可能有教科书给出解答,也不可能等尘埃落定再去总结。只有行动者在忒休斯之船上,一边航行一边修补,甚至是大修大补。
而对于智能驾驶产业的新玩家,反倒是可以在看尽前辈们“出海”的跌宕起伏之后,将自己的“忒休斯之船”打造得足够坚固。
2019年底成立的毫末智行,无疑是智能驾驶众多玩家中成立较晚的一位新手,但却是从理论到实践都武装的足够充分的航海家。
基于对智能驾驶商业发展的洞察,毫末智行CEO顾维灏提出了一条发展定律,即“从低速到高速,从载物到载人,从商用到民用”,在产品路线上,走一条“可行、可靠、可商用”的渐进式路线。
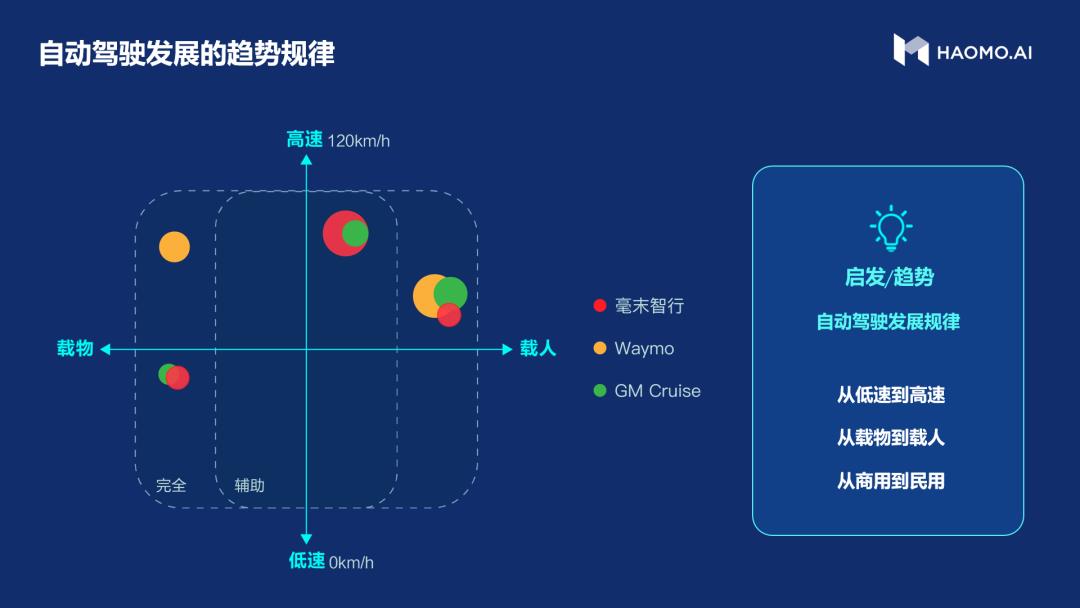
走无人驾驶的“低速、载物和商用”路线,也就是末端无人配送路线,解决了无人驾驶最根本的安全困局,同时也找到能够快速变现的商业模式,即将末端无人配送方案销售给B端企业或为B端企业提供无人配送服务的方式来完成商业闭环。
而“高速、载人、民用”的路线一直是智能驾驶当中无人驾驶想要触达的终极场景,但是不可避免地要碰触到“安全、法规、技术成熟、成本规模”等全部难题。而毫末智行则合乎逻辑与规律地选择了辅助驾驶路线,帮助主机厂一起打造逐步迭代的辅助驾驶产品,从高速公路的简单场景一步步扩展至城市快速路、城市内部道路的复杂场景,逐步提高用户对产品的接受度,实现规模效应。
以此为基点,毫末智行提出了一个“风车战略”的模型,即以“乘用车辅助驾驶、末端物流自动配送车和智能硬件”为叶片,以“数据智能”为轴心,通过叶片不断地去积累场景数据,促进数据能力的迭代,从而能生产出更好的产品,形成了一个“技术-产品-商业-技术”的良性循环。
在智能驾驶产业的发展逻辑中,智能驾驶技术的成熟始终是核心,安全性、好的产品体验和商业模式都建立其上。而智能驾驶技术的成熟依赖大规模的数据训练,这种规模的数据不可能在实验室里、少量的路测车上实现,只能在大规模的真实行驶数据中获得。毫末在国内率先提出了数据智能体系MANA,并依托规模量产乘用车来反哺数据智能系统发展的智能驾驶企业。
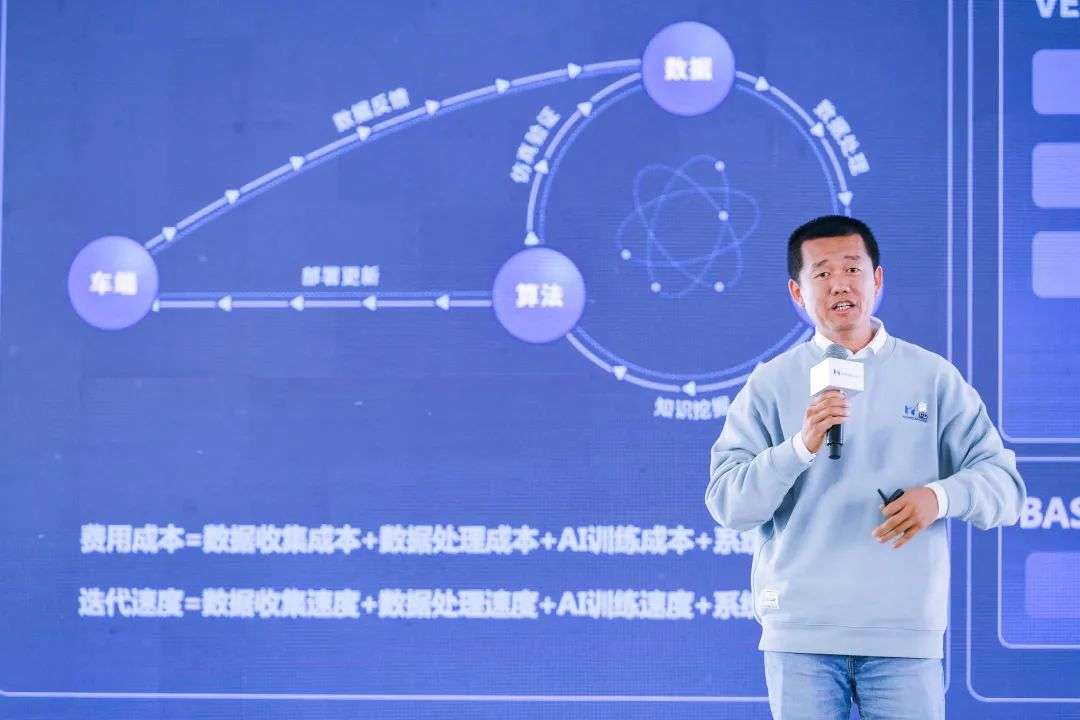
用顾维灏的解释来说就是:“MANA是毫末自动驾驶产品进化的核心动能。随着时间积累,MANA会让毫末自动驾驶系统的感知更准确,认知决策更像人类,让标注、仿真验证更高效,不断提高算力利用效率,打造更快、更稳、更安全的自动驾驶系统。”
这成为毫末智行这位新生能够在短短两年多时间里就快速发展的底层逻辑。
截至今年4月,毫末智行已在长城旗下6款量产车型中搭载HPilot辅助驾驶系统,用户累计行驶里程已经突破700万公里,这些数据未来还在进一步增长。
值得注意的是,对于智能驾驶感知方案的设计,毫末智行并没有像特斯拉那么激进。在最近发布的毫末HPilot 3.0的方案里,我们依然可以看到搭载有激光雷达。
对于激光雷达,要不要上车,这不是一个“真理掌握在少数人手里还是多数人手里”的问题,而是一个有激光雷达能否在当前阶段更能保证辅助驾驶产品安全性的问题,是否有消费者愿意为激光雷达埋单的问题。
显然,随着激光雷达价格的大幅下探,原来让马斯克怒不可遏的“傻子才用激光雷达”的成本问题正在得到解决,而激光雷达对于智能驾驶安全性的收益则正在显著提高。另外,从用户安全角度来说,能够增强安全冗余的传感器方案,至少要优于仅靠单一传感器带来心理上的安全感。

(高精地图是自动驾驶必选项?)
对于高精地图这一选项,毫末智行也给出了比较务实的态度。在乘用车辅助驾驶的城市高精地图获准使用之前,毫末智行提出了“重感知”的辅助驾驶解决方案。这相当于武功高手在获得趁手兵器之前,将自己内力练好。而一旦城市高精地图可以纳入商用,基于用户安全第一的理念,自然还是要采用,充分保护用户的安全,而即使在某些没有高精地图覆盖的场景,也能帮助用户规避驾驶风险,保障驾驶的周全。
因此,对于像马斯克这样一位在多个领域已经有着传奇色彩的“大人物”,我们也不必过分迷信。马斯克认为人类仅靠双眼就能感知世界,轻松开车,那么自动驾驶是不是也只靠眼睛就可以呢?当然可以。但是能不能开好、开稳、开得安全,不犯人类盲区出现的那些事故,是要打一个疑问的。
事实上,对于新手司机和老手司机来说,尽管他们都在依靠视觉开车,但显然他们头脑中的开车的知识是不一样的。老手司机有着对于城市环境丰富的记忆和对于他人开车行为的丰富预判,对于潜在危险的感知。这些不是仅靠视觉来实现的。也就是说,老司机可能在头脑里预装了城市的“高精地图”,具有了“激光雷达”一样的超视距的感知能力,而这些能力不是依靠摄像头的训练就可以学会的。把这种能力直接给到智能驾驶系统,难度不相当于为新手智驾系统做了功力升级吗?

在这次毫末AI DAY的分享上,顾维灏表示,毫末城市NOH在中国城市道路场景的表现已经不输于特斯拉在中国道路的水平了。
这一点上,毫末智行似乎没有迷信“权威”,也不担心被说成是“跟随主流”。采用实事求是的态度,大胆假设、小心求证,才是做好智能驾驶产品的态度。
自动驾驶“没有秘密”
对于“第一性原理”的理解,我们可以看做是任何一个系统的“关键设定”。这个设定既不会是谁家自创的武功秘籍,也不可能被谁能独家专有的技术专利,而是一个需要费尽心力去探索和思考的逻辑起点。
自动驾驶领域是“没有秘密”的,关键在于你怎么看待这些逻辑起点。
这个逻辑起点,只需要你信还是不信,想明白还是想不明白,此后的行动能否一以贯之的按照这个逻辑起点去贯彻执行,能够笃定相信这一逻辑起点所打造的系统的“真理性”。
对于特斯拉这样的业内先驱,还是毫末智行这样的行业新星,对于智能驾驶第一性原理的认知是“大同小异”的。即在技术维度上,通过数据智能的方式,从技术迭代和成本降低两个方面来实现自动驾驶技术的升级,通过渐进式方式走向无人驾驶的终局;在人类需求维度上,通过辅助驾驶产品的迭代,同时满足人们对轻松驾驶的需要和对接受智能驾驶安全担忧之间的平衡,来为智能驾驶产业的成长提供足够长的成长周期。
当然,这些第一性原理只是“两家之言”,特斯拉的完全自动驾驶(FSD)所承诺的无人驾驶能力也一再延期,而毫末智行的数据规模也还在增长的早期阶段。
正如顾维灏所言,自动驾驶是一个长赛道。
一切都没有定论。目前他们所认定的“第一性原理”,也还只是一个“假设”,尚未成为智能驾驶领域的金科玉律。
至于证明这一“前提假设”的时间,我们希望不会太过遥远。
*本文图片均来源于网络
深挖智能这口井,同好添加vx:zenghy2017
部分图片来自网络,且未核实版权归属,不作为商业用途,如有侵犯,请作者与我们联系
以上是关于自动驾驶的第一性原理:特斯拉与毫末智行“求同存异”?的主要内容,如果未能解决你的问题,请参考以下文章
渐进派破壁:西有特斯拉,东有毫末智行!用数据智能推动自动驾驶历史进城...