实时音频编解码之四 LPC和LSF
Posted shichaog
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了实时音频编解码之四 LPC和LSF相关的知识,希望对你有一定的参考价值。
本文谢绝任何形式转载,谢谢。
1.5.1 基频
语音信号的基频(pitch)通常用
F
0
F0
F0或
F
0
F_0
F0表示,基频是物理意义上的概念,人耳听到的基频称为基音,基音反应的是人耳对基频的感知。对于低比特率的编码器,基频的准确性对于合成的语音质量是至关重要的,基频反映的是准静态语音信号的周期性,这一周期性和声带的震动频率相关,基频是声带短时平均震动次数,由于基频是由人的器官发声形成而不是器件的震动产生,因此存在显著的变动,工程上将周期变动和幅度的变用抖动(jitter)和振幅微扰(shimmer)表示,基频取决于人的声带和声道生理结构,婴儿的基频在500Hz左右,儿童在250~400 Hz ,女性在120Hz~500Hz(周期为2ms~8ms),男性在50Hz~250Hz(周期为4ms~20ms),男人的基频比女人和小孩的要低些,对于个体而言
F
0
F0
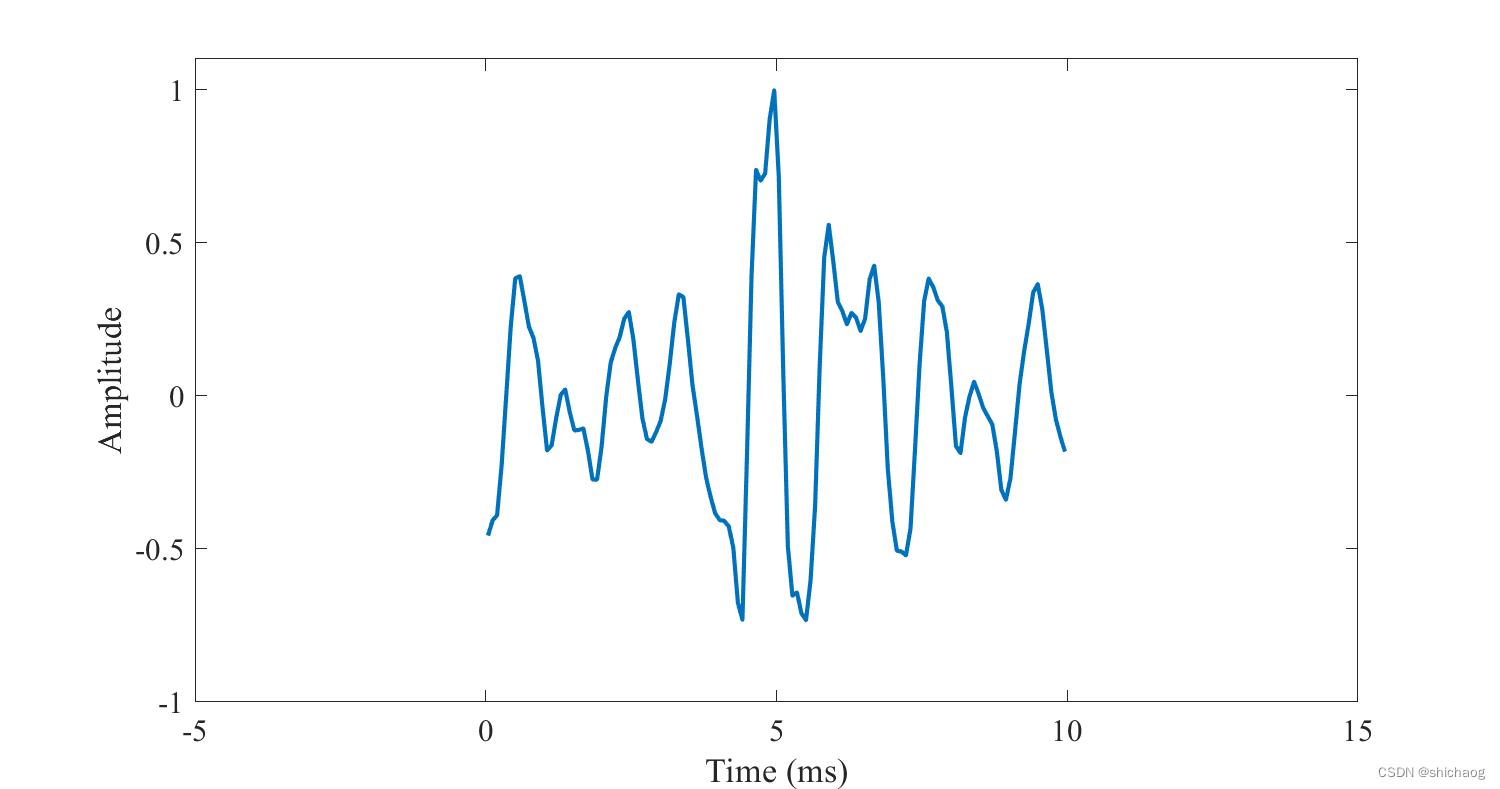
F0取决于声道的长度,这和一个人的身高也是有关系的。基频滞后(称为pitch lag,是按采样点计数的延迟值)是基频周期的一种表示方式,可以通过信号自相关最大值确定基频滞后,为了防止基频跳动,通常需要对信号进行预处理,且对基频进行跟踪和平滑处理过滤跳跃值,大部分基频跟踪算法先用带通滤波器滤波和高频分量预处理,然后再利用短时相关性进行基频估计,最后在进行数学意义上的平滑后处理。听觉上F1对人耳的影响比F0大,图1-15显示了基频及其谐波关系,频谱包络对于参数编码器至关重要。

图1-15 基频及其谐波关系
基频通常逐帧计算,由于声道共振峰、语音段起始难以确定以及噪声和回声等使得准确基频估计较为困难,工程实现中基频估计需要在计算复杂度和性能平衡,很多算法用于估计基频周期,其中最为常用的算法是自相关方法,且自相关有如Levsion递归等快速算法。
设x[n]为采集到的语音信号,n是采样点索引,设帧长为N,某帧结束索引为m,则自相关值为:
r
x
x
[
l
,
m
]
=
∑
n
=
m
−
N
+
1
m
x
[
n
]
x
[
n
−
l
]
r_xx[l,m]=\\sum \\limits_n=m-N+1^mx[n]x[n-l]
rxx[l,m]=n=m−N+1∑mx[n]x[n−l]
上式反应了帧
x
[
n
]
,
n
=
m
−
N
+
1
,
.
.
.
,
m
x[n],n=m-N+1,...,m
x[n],n=m−N+1,...,m和时移信号
x
[
n
−
l
]
x[n-l]
x[n−l]之间的相似性,基频滞后值通常在基频存在的可能范围内搜索(如8kHz采样率时,基频范围54.4Hz~400Hz,周期2.5ms~18.3ms,而滞后值
l
l
l在20~147),选择自相关最大的
l
l
l为滞后值,这一滞后值(20~147)可以用7比特编码,因为147-20=127可以用
2
7
=
128
2^7=128
27=128表示。在计算自相关之前,通常需要进行低通滤波以去掉高频成份和带外噪声的干扰。
1.4.2 全零点和全极点滤波
M阶全极点滤波器的传递函数是:
H
(
z
)
=
1
A
(
z
)
=
1
1
+
∑
i
=
1
M
a
i
z
−
i
H(z)=\\frac1A(z)=\\frac11+\\sum \\limits_i=1^Ma_iz^-i
H(z)=A(z)1=1+i=1∑Maiz−i1
当输入信号是
x
[
n
]
x[n]
x[n],输出信号是
y
[
n
]
y[n]
y[n]时,时域响应如下:
y
[
n
]
=
x
[
n
]
−
∑
i
=
1
M
a
i
y
[
n
−
i
]
y[n]=x[n]-\\sum \\limits_i=1^Ma_iy[n-i]
y[n]=x[n]−i=1∑Maiy[n−i]
其表达形式和IIR滤波器一致。
M阶全零点滤波器的传递函数是:
A
(
z
)
=
1
+
∑
i
=
1
M
a
i
z
−
i
A(z)= 1+\\sum \\limits_i=1^Ma_iz^-i
A(z)=1+i=1∑Maiz−i
类似的,当输入信号是
x
[
n
]
x[n]
x[n],输出信号是
y
[
n
]
y[n]
y[n]时,时域响应如下:
y
[
n
]
=
x
[
n
]
+
∑
i
=
1
M
a
i
x
[
n
−
i
]
y[n]=x[n]+\\sum \\limits_i=1^Ma_ix[n-i]
y[n]=x[n]+i=1∑Maix[n−i]
其表达形式和FIR滤波器一致。
上述全零点和全极点滤波器的传递函数存在互逆的关系,
a
i
a_i
ai是滤波器的系数。上述两式称为滤波器的直接型实现方式,还有格型实现方式,在格型实现方式中会引入反射系数。反射系数方法可以直接从系数值监督滤波器的稳定性,格型滤波实现可以不用求解系数
a
i
a_i
ai也增加了滤波的稳定性,基于建模的语音编码方式根据语音生成的特点,采用较为简单的全零点模型对声道进行建模。
1.4.3 LPC
精确重构短时功率谱包络对于音质和清晰度是非常重要的,谱峰对于感知质量更为关键,而LPC参数的包络谱(反应了短时内的共振峰信息)更有益于谱峰的表示,对于低比特率语音编码器,LPC广泛用于谱包络编码,语音编码中LPC是逐帧获取的,通常50帧/秒,LPC通常10~20阶,为压缩比特率通常会对LPC进行量化压缩,由于LPC系数是逐帧获取的,因而有两种方式对齐进行量化,分别是标量量化和矢量量化,标量量化是逐点量化,点与点之间是独立的,而矢量量化是对每帧提取的一组LPC系数量化,其目标是最小化各组失真,这使得矢量量化在各量化比特率下失真都比标量量化小。
语音的相关性有短时和长时两种,短时相关性的滞后小于2ms,而长时相关滞后时间通常大于2ms,这是因为长时相关性基于语音信号的周期性特征,短时相关性确定了功率谱包络,长时相关性确定了功率谱的精细结构,这里的LPC系数是由短时相关性获取的,短时相关性是声道形状的函数。
语音是连续信号,如下图所示,短时采样点之间是相关的, 以上是关于实时音频编解码之四 LPC和LSF的主要内容,如果未能解决你的问题,请参考以下文章
根据这一相关性,由前一个采样点
x
[
n
−
1
]
x[n-1]
x[n−1]可以预估当前采样点
x
^
[
n
]
\\hat x[n]
x^[n],当前点的真实值可以用下式计算:
x
[
n
]
≈
x
^
[
n
]
=
x
[
n
−
1
]
x[n] \\approx \\hat x[n] = x[n-1]
x[n]≈x^[n]=x[n−1]
使用越多(对于语音多达50个左右)的历史采样点真实值,估计当前点真实的有效信息越多,准确性越高,可以用p个点估计当前点的值:
x
^
[
n
]
=
−
∑
k
=
1
P
a
k
(
P
)
x
[
n
−
k
]
\\hat x[n]=-\\sum \\limits_k=1^P a_k^(P)x[n-k]
x^[n]=−k=1∑Pak(P)x[n−k]
这是一个标准的线性预测器,是自回归模型,预测器的误差(预测残差)定义为:
e
[
n
]
=
x
[
n
]
−
x
^
[
n
]
=
x
[
n
]
+
∑
k
=
1
P
a
k
(
P
)
x
[
n
−
k
]
=
∑
k
=
0
P
a
k
(
P
)
x
[
n
−
k
]
,
a
0
=
1
e[n] = x[n] - \\hat x[n] = x[n] + \\sum \\limits_k=1^Pa_k^(P)x[n-k] = \\sum \\limits_k=0^P a_k^(P)x[n-k],a_0=1
e[n]=x[n]−x^[n]=x[n]+k=1∑Pak(P)x[n−k]=k=0∑Pak(P)x[n−k],a0=1

线性预测器的P个系数(因符合自回归滤波模型,故这里P也称为阶数,即LPC系数的阶数),
a
1
,
a
2
,
⋯
,
a
p
a_1, a_2,\\cdots, a_p
a1,a2,⋯,ap是LPC系数,P值通常是10~20,
e
[
n
]
e[n]
e[n]被称为残差信号,由于两个相关信号相减之后的残差信号自身相关性很弱,因而残差信号谱包络是近乎平坦的,将残差信号用Z域表示为:
E
[
z
]
=
A
[
z
]
S
[
z
]
E[z] = A[z]S[z]
E[z]=A[z]S[z]
其中
A
[