蓝桥ROS机器人之现代C++学习笔记7.4 条件变量
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了蓝桥ROS机器人之现代C++学习笔记7.4 条件变量相关的知识,希望对你有一定的参考价值。
学习如下代码:
// condition_variable example
#include <iostream> // std::cout
#include <thread> // std::thread
#include <mutex> // std::mutex, std::unique_lock
#include <condition_variable> // std::condition_variable
std::mutex mtx;
std::condition_variable cv;
bool ready = false;
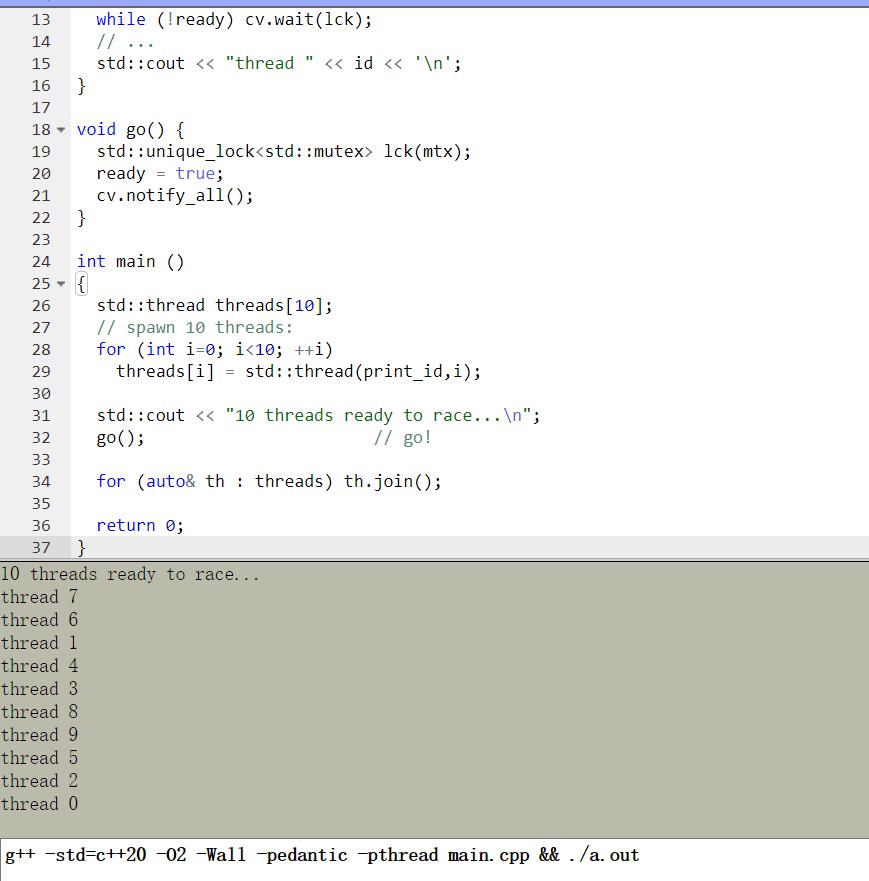
void print_id (int id)
std::unique_lock<std::mutex> lck(mtx);
while (!ready) cv.wait(lck);
// ...
std::cout << "thread " << id << '\\n';
void go()
std::unique_lock<std::mutex> lck(mtx);
ready = true;
cv.notify_all();
int main ()
std::thread threads[10];
// spawn 10 threads:
for (int i=0; i<10; ++i)
threads[i] = std::thread(print_id,i);
std::cout << "10 threads ready to race...\\n";
go(); // go!
for (auto& th : threads) th.join();
return 0;
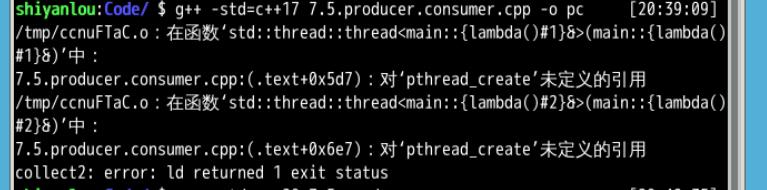
#include <queue>
#include <chrono>
#include <mutex>
#include <thread>
#include <iostream>
#include <condition_variable>
int main()
std::queue<int> produced_nums;
std::mutex mtx;
std::condition_variable cv;
bool notified = false; // notification sign
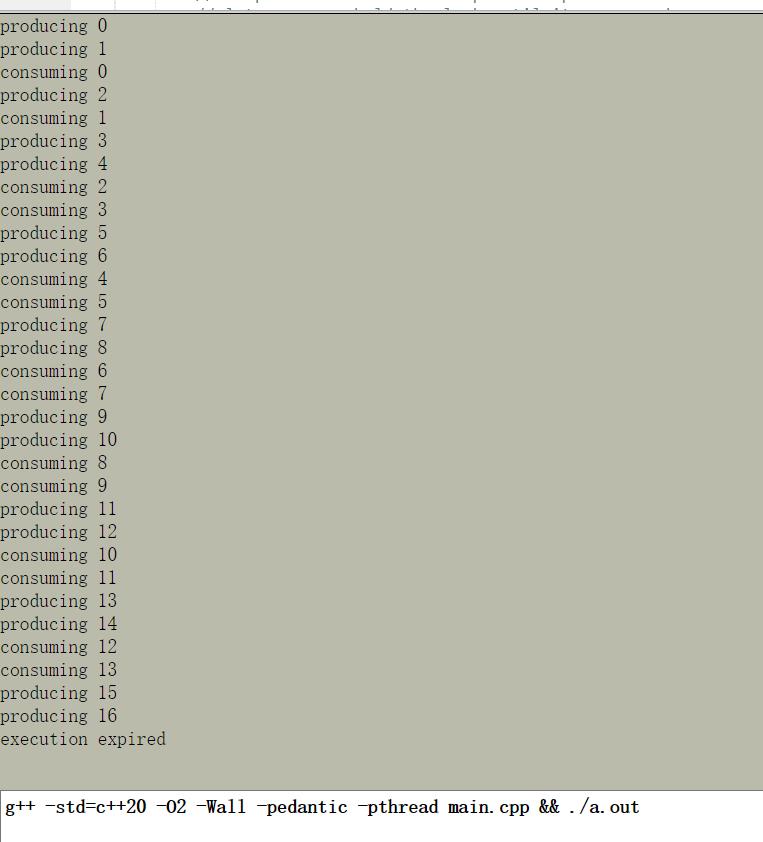
auto producer = [&]()
for (int i = 0; ; i++)
std::this_thread::sleep_for(std::chrono::milliseconds(500));
std::unique_lock<std::mutex> lock(mtx);
std::cout << "producing " << i << std::endl;
produced_nums.push(i);
notified = true;
cv.notify_all();
;
auto consumer = [&]()
while (true)
std::unique_lock<std::mutex> lock(mtx);
while (!notified) // avoid spurious wakeup
cv.wait(lock);
// temporal unlock to allow producer produces more rather than
// let consumer hold the lock until its consumed.
lock.unlock();
std::this_thread::sleep_for(std::chrono::milliseconds(1000)); // consumer is slower
lock.lock();
if (!produced_nums.empty())
std::cout << "consuming " << produced_nums.front() << std::endl;
produced_nums.pop();
notified = false;
;
std::thread p(producer);
std::thread cs[2];
for (int i = 0; i < 2; ++i)
cs[i] = std::thread(consumer);
p.join();
for (int i = 0; i < 2; ++i)
cs[i].join();
return 0;

以上是关于蓝桥ROS机器人之现代C++学习笔记7.4 条件变量的主要内容,如果未能解决你的问题,请参考以下文章