云原生与蓝桥ROS机器人课程 2017-2022
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了云原生与蓝桥ROS机器人课程 2017-2022相关的知识,希望对你有一定的参考价值。
☞ 蓝桥云课ROS机器人发布5年啦(原实验楼ROS机器人在线云实践课程)
☞ 蓝桥ROS机器人之曾经新版本(indigo/kinetic/melodic/ardent/dashing)
通过查阅资料发现云原生通常有如下五个特征:
- 轻、快、不变的基础设施
- 弹性服务编排
- 开发运营一体化
- 微服务架构
- 无服务模型
云原生提倡应用的敏捷、可靠、高弹性、易扩展以及持续更新。在云原生应用和服务平台的构建过程中,近年兴起的容器技术凭借其高弹性、敏捷的特性以及活跃、强大的社区支持,成为云原生等应用场景下的重要支撑技术。无服务、服务网格等服务新型部署形态也在改变云端应用的设计、开发和运行,从而重构云上业务模式。
蓝桥ROS机器人课程是否符合类似特征呢?
轻、快、不变的基础设施
容器技术完美应用于课程,一个网页无需配置即可学习(轻+快),无论在何处都是一样的(不变)
启动一个机器人仿真非常容易。
弹性服务编排
对于课程而言,弹性服务编排类似丰富的课程体验,动手实操,依据每个学生不同需求,学生可以自己规划实践时间,每个要点也是因人而异。

同时也支持大量扩展:
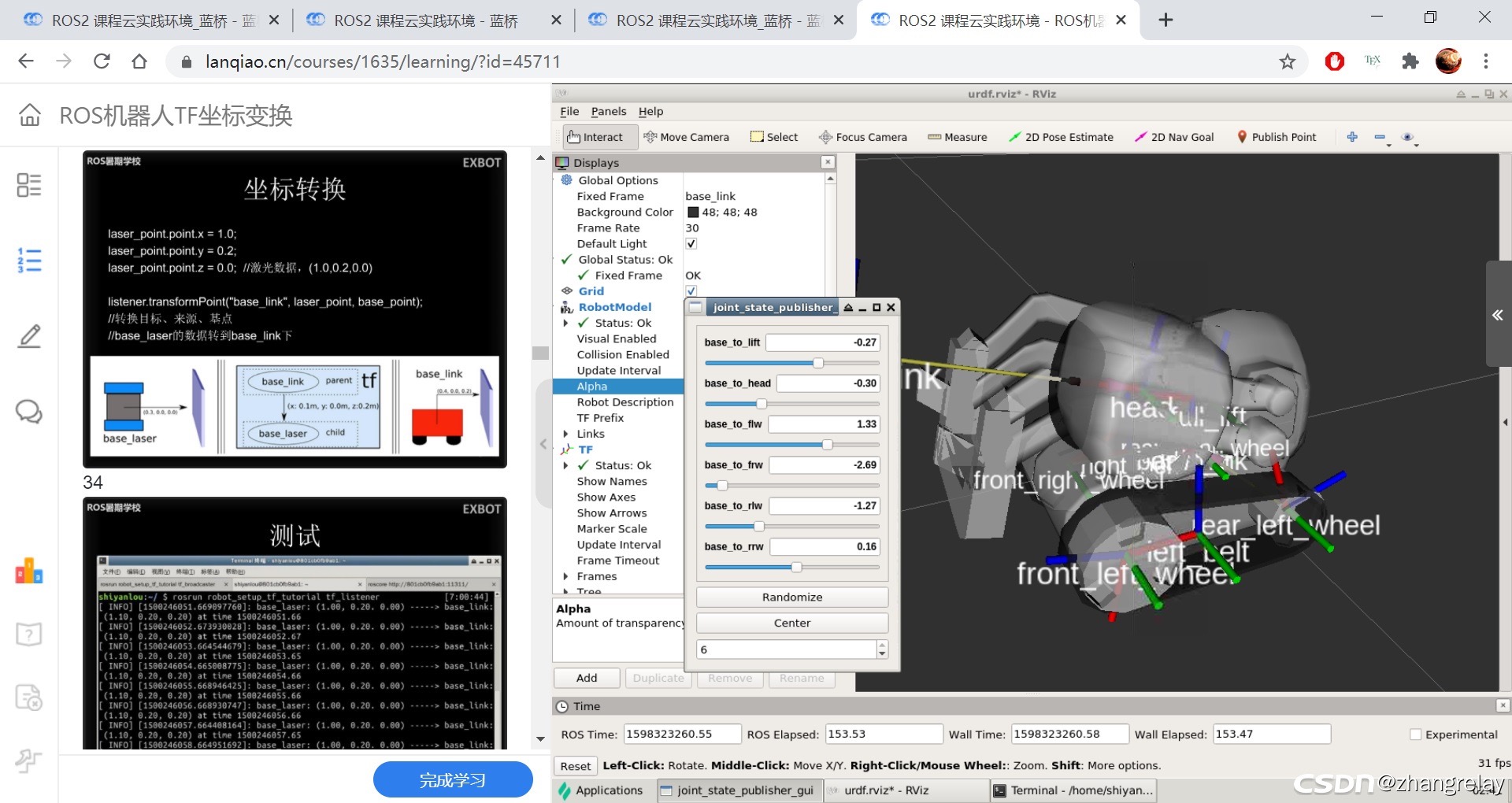
主流ROS1/2课程均可在线配置后直接学习和研究。
开发运营一体化
云原生ROS课程的实践内容需要及时调整,功能需要快速丰富和完善,云端软件快速迭代,云课程开发后需要快速教学和实践,因而教与学一体化深深地融入云原生课程整个生命周期中。
这部分案例较多,博客中最近也都在更新。
微服务架构
在云原生课程设计中,课程体量更小,因而传统单体课程的内容被拆解成大量独立、细粒度的项目实训。
比如,动态甜甜圈:
再比如:

案例非常丰富,请参考其他博客内容。
无服务模型
无服务本质是聚焦在课程本身,比如单片机编程课程,无需关注太多单片机相关琐碎知识点,聚焦于单片机编程案例:
以上是关于云原生与蓝桥ROS机器人课程 2017-2022的主要内容,如果未能解决你的问题,请参考以下文章