蓝桥ROS机器人之ROS1和ROS2切换
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了蓝桥ROS机器人之ROS1和ROS2切换相关的知识,希望对你有一定的参考价值。
首先,确保完成配置:
为了确保安装速度,请使用国内源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'如果功能包不全:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
ROS1:
source /opt/ros/kinetic/setup.bash
source /opt/ros/kinetic/setup.zsh
ROS2:
source /opt/ros/ardent/setup.bash
source /opt/ros/ardent/setup.zsh
如果弄成开启终端可切换的模式使用:
echo "ros1 kinetic(1) or ros2 ardent(2)?"
read edition
if [ "$edition" -eq "1" ];then
source /opt/ros/kinetic/setup.bash
else
source /opt/ros/ardent/setup.bash
fizsh
echo "ros1 kinetic(1) or ros2 ardent(2)?"
read edition
if [ "$edition" -eq "1" ];then
source /opt/ros/kinetic/setup.zsh
else
source /opt/ros/ardent/setup.zsh
fi1
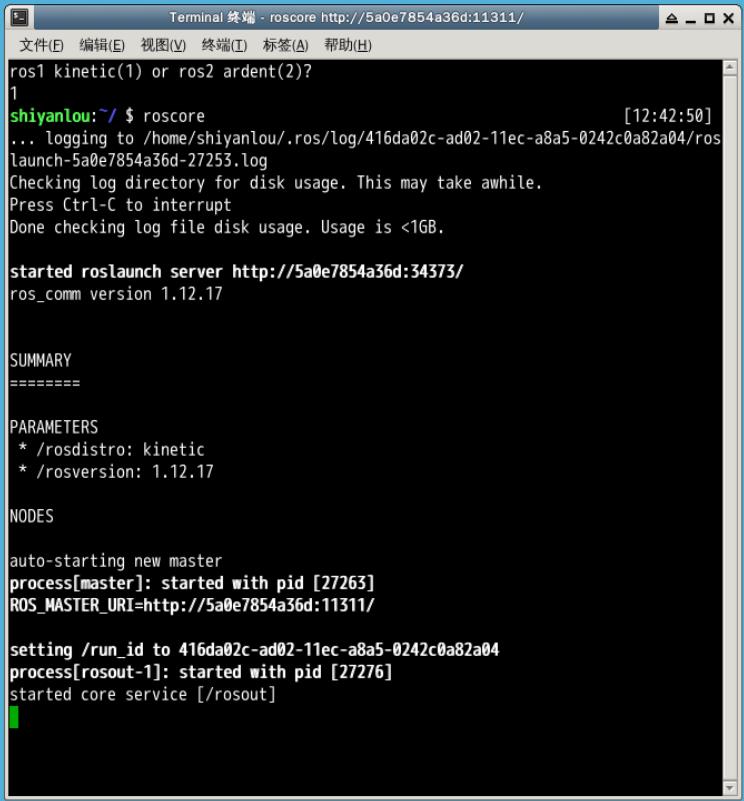
ros1 kinetic(1) or ros2 ardent(2)?
1
shiyanlou:~/ $ roscore [12:42:50]
... logging to /home/shiyanlou/.ros/log/416da02c-ad02-11ec-a8a5-0242c0a82a04/roslaunch-5a0e7854a36d-27253.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://5a0e7854a36d:34373/
ros_comm version 1.12.17
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.17
NODES
auto-starting new master
process[master]: started with pid [27263]
ROS_MASTER_URI=http://5a0e7854a36d:11311/
setting /run_id to 416da02c-ad02-11ec-a8a5-0242c0a82a04
process[rosout-1]: started with pid [27276]
started core service [/rosout]
2
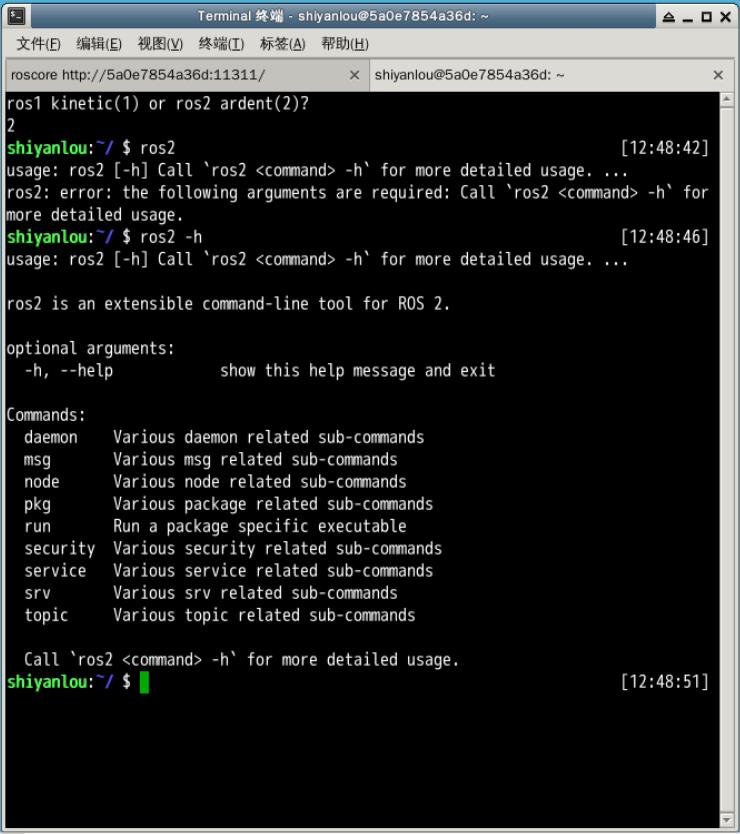
ros1 kinetic(1) or ros2 ardent(2)?
2
shiyanlou:~/ $ ros2 [12:48:42]
usage: ros2 [-h] Call `ros2 <command> -h` for more detailed usage. ...
ros2: error: the following arguments are required: Call `ros2 <command> -h` for more detailed usage.
shiyanlou:~/ $ ros2 -h [12:48:46]
usage: ros2 [-h] Call `ros2 <command> -h` for more detailed usage. ...
ros2 is an extensible command-line tool for ROS 2.
optional arguments:
-h, --help show this help message and exit
Commands:
daemon Various daemon related sub-commands
msg Various msg related sub-commands
node Various node related sub-commands
pkg Various package related sub-commands
run Run a package specific executable
security Various security related sub-commands
service Various service related sub-commands
srv Various srv related sub-commands
topic Various topic related sub-commands
Call `ros2 <command> -h` for more detailed usage.
shiyanlou:~/ $ [12:48:51]
printenv | grep ROSROS1:
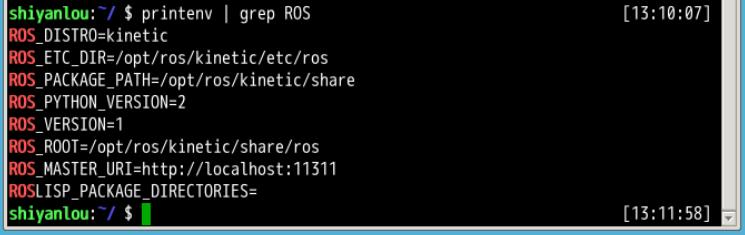
ROS2:

指令记录如下:
26 gedit .bashrc
27 gedit .zshrc
28 roscore
29 ros2
30 ros2 -h
31 printenv | grep ROS
以上是关于蓝桥ROS机器人之ROS1和ROS2切换的主要内容,如果未能解决你的问题,请参考以下文章