3d激光雷达开发(narf关键点)
Posted 费晓行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了3d激光雷达开发(narf关键点)相关的知识,希望对你有一定的参考价值。
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
所谓关键点,其实就是那些梯度信息特征比较明显的点。至于是多明显,这部分需要用数学公式来进行标识。第一次学的时候,可以先有一个感性的认识。pcl库给出的例子是从RangeImage中提取narf关键点,原代码地址在这,https://pcl.readthedocs.io/projects/tutorials/en/latest/narf_keypoint_extraction.html#narf-keypoint-extraction
1、准备narf.cpp文件
/* \\author Bastian Steder */
#include <iostream>
#include <pcl/range_image/range_image.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/features/range_image_border_extractor.h>
#include <pcl/keypoints/narf_keypoint.h>
#include <pcl/console/parse.h>
#include <pcl/common/file_io.h> // for getFilenameWithoutExtension
typedef pcl::PointXYZ PointType;
// --------------------
// -----Parameters-----
// --------------------
float angular_resolution = 0.5f;
float support_size = 0.2f;
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;
bool setUnseenToMaxRange = false;
// --------------
// -----Help-----
// --------------
void
printUsage (const char* progName)
std::cout << "\\n\\nUsage: "<<progName<<" [options] <scene.pcd>\\n\\n"
<< "Options:\\n"
<< "-------------------------------------------\\n"
<< "-r <float> angular resolution in degrees (default "<<angular_resolution<<")\\n"
<< "-c <int> coordinate frame (default "<< (int)coordinate_frame<<")\\n"
<< "-m Treat all unseen points as maximum range readings\\n"
<< "-s <float> support size for the interest points (diameter of the used sphere - "
<< "default "<<support_size<<")\\n"
<< "-h this help\\n"
<< "\\n\\n";
//void
//setViewerPose (pcl::visualization::PCLVisualizer& viewer, const Eigen::Affine3f& viewer_pose)
//
//Eigen::Vector3f pos_vector = viewer_pose * Eigen::Vector3f (0, 0, 0);
//Eigen::Vector3f look_at_vector = viewer_pose.rotation () * Eigen::Vector3f (0, 0, 1) + pos_vector;
//Eigen::Vector3f up_vector = viewer_pose.rotation () * Eigen::Vector3f (0, -1, 0);
//viewer.setCameraPosition (pos_vector[0], pos_vector[1], pos_vector[2],
//look_at_vector[0], look_at_vector[1], look_at_vector[2],
//up_vector[0], up_vector[1], up_vector[2]);
//
// --------------
// -----Main-----
// --------------
int
main (int argc, char** argv)
// --------------------------------------
// -----Parse Command Line Arguments-----
// --------------------------------------
if (pcl::console::find_argument (argc, argv, "-h") >= 0)
printUsage (argv[0]);
return 0;
if (pcl::console::find_argument (argc, argv, "-m") >= 0)
setUnseenToMaxRange = true;
std::cout << "Setting unseen values in range image to maximum range readings.\\n";
int tmp_coordinate_frame;
if (pcl::console::parse (argc, argv, "-c", tmp_coordinate_frame) >= 0)
coordinate_frame = pcl::RangeImage::CoordinateFrame (tmp_coordinate_frame);
std::cout << "Using coordinate frame "<< (int)coordinate_frame<<".\\n";
if (pcl::console::parse (argc, argv, "-s", support_size) >= 0)
std::cout << "Setting support size to "<<support_size<<".\\n";
if (pcl::console::parse (argc, argv, "-r", angular_resolution) >= 0)
std::cout << "Setting angular resolution to "<<angular_resolution<<"deg.\\n";
angular_resolution = pcl::deg2rad (angular_resolution);
// ------------------------------------------------------------------
// -----Read pcd file or create example point cloud if not given-----
// ------------------------------------------------------------------
pcl::PointCloud<PointType>::Ptr point_cloud_ptr (new pcl::PointCloud<PointType>);
pcl::PointCloud<PointType>& point_cloud = *point_cloud_ptr;
pcl::PointCloud<pcl::PointWithViewpoint> far_ranges;
Eigen::Affine3f scene_sensor_pose (Eigen::Affine3f::Identity ());
std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument (argc, argv, "pcd");
if (!pcd_filename_indices.empty ())
std::string filename = argv[pcd_filename_indices[0]];
if (pcl::io::loadPCDFile (filename, point_cloud) == -1)
std::cerr << "Was not able to open file \\""<<filename<<"\\".\\n";
printUsage (argv[0]);
return 0;
scene_sensor_pose = Eigen::Affine3f (Eigen::Translation3f (point_cloud.sensor_origin_[0],
point_cloud.sensor_origin_[1],
point_cloud.sensor_origin_[2])) *
Eigen::Affine3f (point_cloud.sensor_orientation_);
std::string far_ranges_filename = pcl::getFilenameWithoutExtension (filename)+"_far_ranges.pcd";
if (pcl::io::loadPCDFile (far_ranges_filename.c_str (), far_ranges) == -1)
std::cout << "Far ranges file \\""<<far_ranges_filename<<"\\" does not exists.\\n";
else
setUnseenToMaxRange = true;
std::cout << "\\nNo *.pcd file given => Generating example point cloud.\\n\\n";
for (float x=-0.5f; x<=0.5f; x+=0.01f)
for (float y=-0.5f; y<=0.5f; y+=0.01f)
PointType point; point.x = x; point.y = y; point.z = 2.0f - y;
point_cloud.push_back (point);
point_cloud.width = point_cloud.size (); point_cloud.height = 1;
// -----------------------------------------------
// -----Create RangeImage from the PointCloud-----
// -----------------------------------------------
float noise_level = 0.0;
float min_range = 0.0f;
int border_size = 1;
pcl::RangeImage::Ptr range_image_ptr (new pcl::RangeImage);
pcl::RangeImage& range_image = *range_image_ptr;
range_image.createFromPointCloud (point_cloud, angular_resolution, pcl::deg2rad (360.0f), pcl::deg2rad (180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size);
range_image.integrateFarRanges (far_ranges);
if (setUnseenToMaxRange)
range_image.setUnseenToMaxRange ();
// --------------------------------------------
// -----Open 3D viewer and add point cloud-----
// --------------------------------------------
pcl::visualization::PCLVisualizer viewer ("3D Viewer");
viewer.setBackgroundColor (1, 1, 1);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler (range_image_ptr, 0, 0, 0);
viewer.addPointCloud (range_image_ptr, range_image_color_handler, "range image");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "range image");
//viewer.addCoordinateSystem (1.0f, "global");
//PointCloudColorHandlerCustom<PointType> point_cloud_color_handler (point_cloud_ptr, 150, 150, 150);
//viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud");
viewer.initCameraParameters ();
//setViewerPose (viewer, range_image.getTransformationToWorldSystem ());
// --------------------------
// -----Show range image-----
// --------------------------
pcl::visualization::RangeImageVisualizer range_image_widget ("Range image");
range_image_widget.showRangeImage (range_image);
// --------------------------------
// -----Extract NARF keypoints-----
// --------------------------------
pcl::RangeImageBorderExtractor range_image_border_extractor;
pcl::NarfKeypoint narf_keypoint_detector (&range_image_border_extractor);
narf_keypoint_detector.setRangeImage (&range_image);
narf_keypoint_detector.getParameters ().support_size = support_size;
//narf_keypoint_detector.getParameters ().add_points_on_straight_edges = true;
//narf_keypoint_detector.getParameters ().distance_for_additional_points = 0.5;
pcl::PointCloud<int> keypoint_indices;
narf_keypoint_detector.compute (keypoint_indices);
std::cout << "Found "<<keypoint_indices.size ()<<" key points.\\n";
// ----------------------------------------------
// -----Show keypoints in range image widget-----
// ----------------------------------------------
//for (std::size_t i=0; i<keypoint_indices.size (); ++i)
//range_image_widget.markPoint (keypoint_indices[i]%range_image.width,
//keypoint_indices[i]/range_image.width);
// -------------------------------------
// -----Show keypoints in 3D viewer-----
// -------------------------------------
pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints_ptr (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>& keypoints = *keypoints_ptr;
keypoints.resize (keypoint_indices.size ());
for (std::size_t i=0; i<keypoint_indices.size (); ++i)
keypoints[i].getVector3fMap () = range_image[keypoint_indices[i]].getVector3fMap ();
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> keypoints_color_handler (keypoints_ptr, 0, 255, 0);
viewer.addPointCloud<pcl::PointXYZ> (keypoints_ptr, keypoints_color_handler, "keypoints");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "keypoints");
//--------------------
// -----Main loop-----
//--------------------
while (!viewer.wasStopped ())
range_image_widget.spinOnce (); // process GUI events
viewer.spinOnce ();
pcl_sleep(0.01);
2、准备CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(narf)
find_package(PCL 1.2 REQUIRED)
include_directories($PCL_INCLUDE_DIRS)
link_directories($PCL_LIBRARY_DIRS)
add_definitions($PCL_DEFINITIONS)
add_executable (narf narf.cpp)
target_link_libraries (narf $PCL_LIBRARIES)3、生成sln工程,准备编译,
4、准备执行narf.exe文件,不用添加参数
过一会,可以发现有6个关键点,
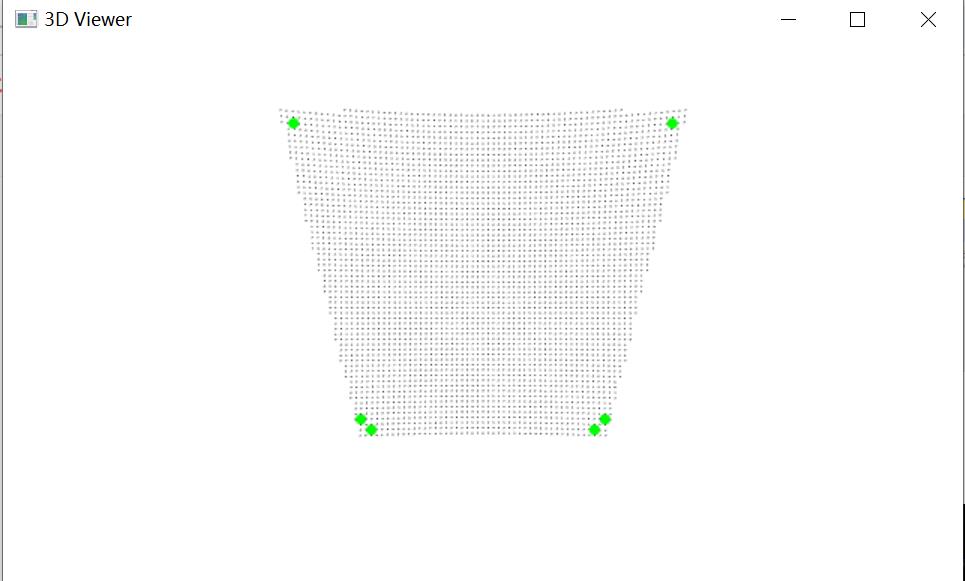
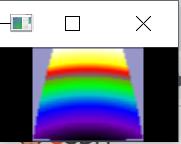
也就是上面图形中绿色的部分,当然RangeImage还是少不了的。
以上是关于3d激光雷达开发(narf关键点)的主要内容,如果未能解决你的问题,请参考以下文章