从零学习VH6501 —— Bus Off 的基本理解和测试用例设计
Posted 蚂蚁小兵
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了从零学习VH6501 —— Bus Off 的基本理解和测试用例设计相关的知识,希望对你有一定的参考价值。
相关文章


系列用的CANoe演示工程我放在了Git上,不定时根据博客更新。
前言
-
测试软硬件环境:
VH6501 CAN Disturbance Interface
CANoe 11 SP2
Win10 X64 -
我们前面做了很多的关于VH6501的基础工作,回到工程上还是要应用,Bus Off 测试 就是VH6501的一个典型使用场景
-
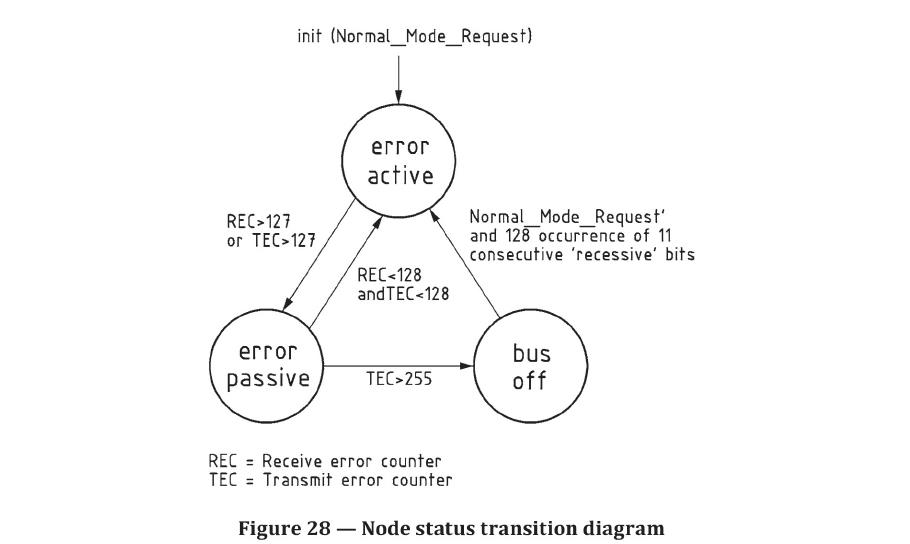
下面这张图是ISO 11898 -1中关于 Bus off的实现机制的描述,接下来我将结合代码来解读下这张图
REC 接收错误计数器
TEC 发送错误计数器

文章目录

CAN Bus Off 的理解
1、什么是CAN Bus Off
某个ECU , 一直向总线上发送消息,可怎么都发送不出去( ECU发送失败:发送错误计数 + 8, ECU发送成功:发送错误计数 - 1)如果这个发送错误计数累计到255 (即连续发了32次都失败) ECU进入Busoff模式
2、总线Bus Off之后会做何处理
ECU 在自己内部检测到BUS OFF后,就自暴自弃了,报个DTC后然后就不发任何消息了。但是现在各厂商的策略都是快慢恢复的测略
快恢复:过了 一段时间(快回复主流时间<100ms) ;ECU的大脑MCU说,喂,CAN模块老兄,你咋了,不要放弃啊,你再重启下,继续发送试一试啊;于是ECU就连续尝试发送报文,如果发送成功,则Bus Off状态解除;如果发送失败,继续计数,再次达到255(32帧错误报文),则Bus off 计数 就 +1 ,
一直这样尝试 ,直到记录了N次Bus OFF(N的取值取决于厂商5-10次不等)都以失败告终。
则MCU就说了,得了,你也别费劲了。你还是转到慢恢复状态吧(200ms -1000ms ),从此以后ECU就以慢恢复的时间尝试发送报文,如果有一天发送成功了,则解除Bus Off,否则慢恢复持续。
CAN Bus Off 的实际测试案例
比如我现在使用的ECU,bus off 需求 如下:
当ECU 连续发送错误帧达到32帧时,进入Bus off 时,要进入快恢复状态 Tq = 100ms;当5次快恢复任然没有恢复的,要进入慢恢复状态,Ts = 1000ms
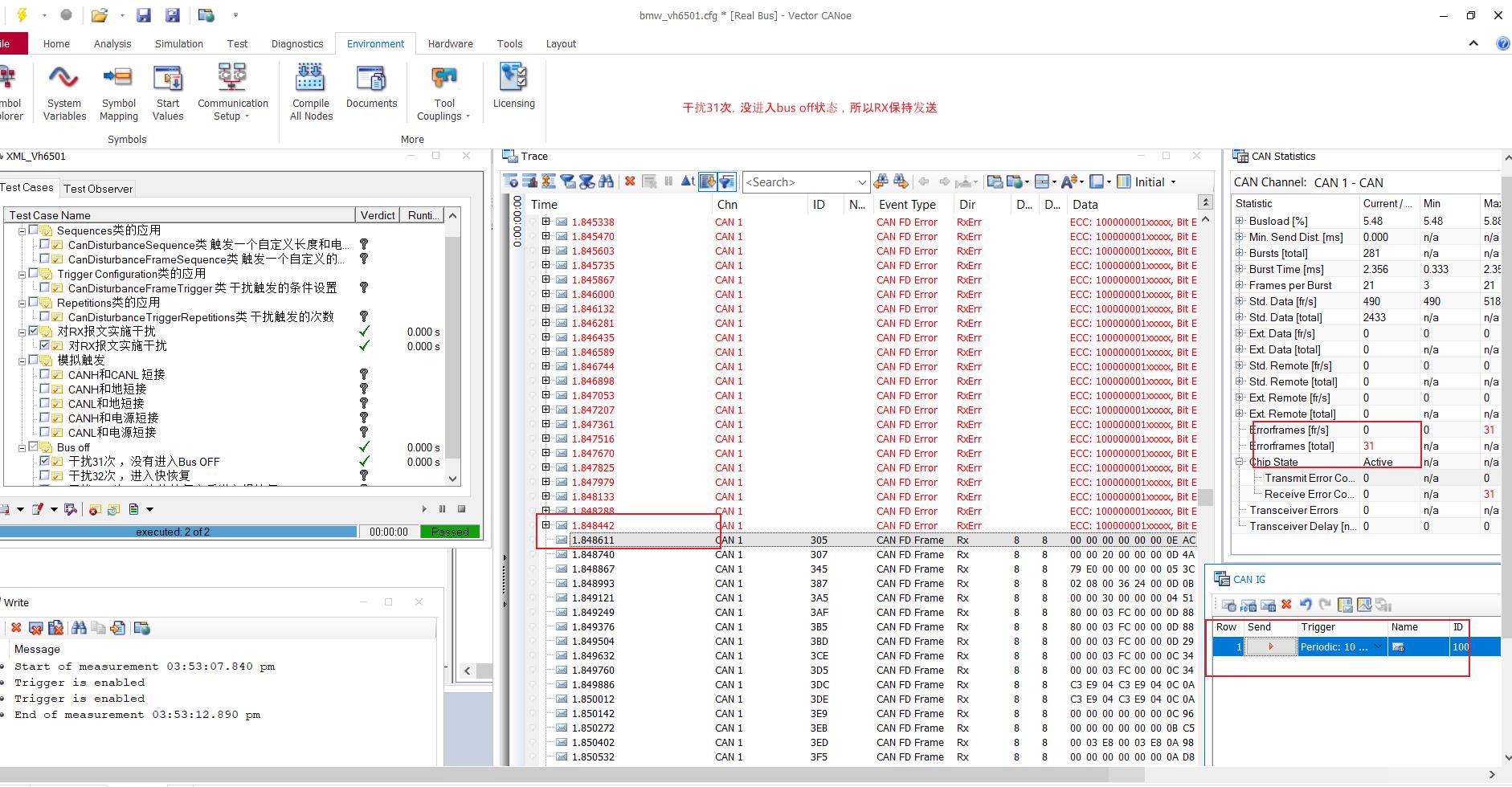
① case 1 : 连续错误帧31 ,则不进入bus off
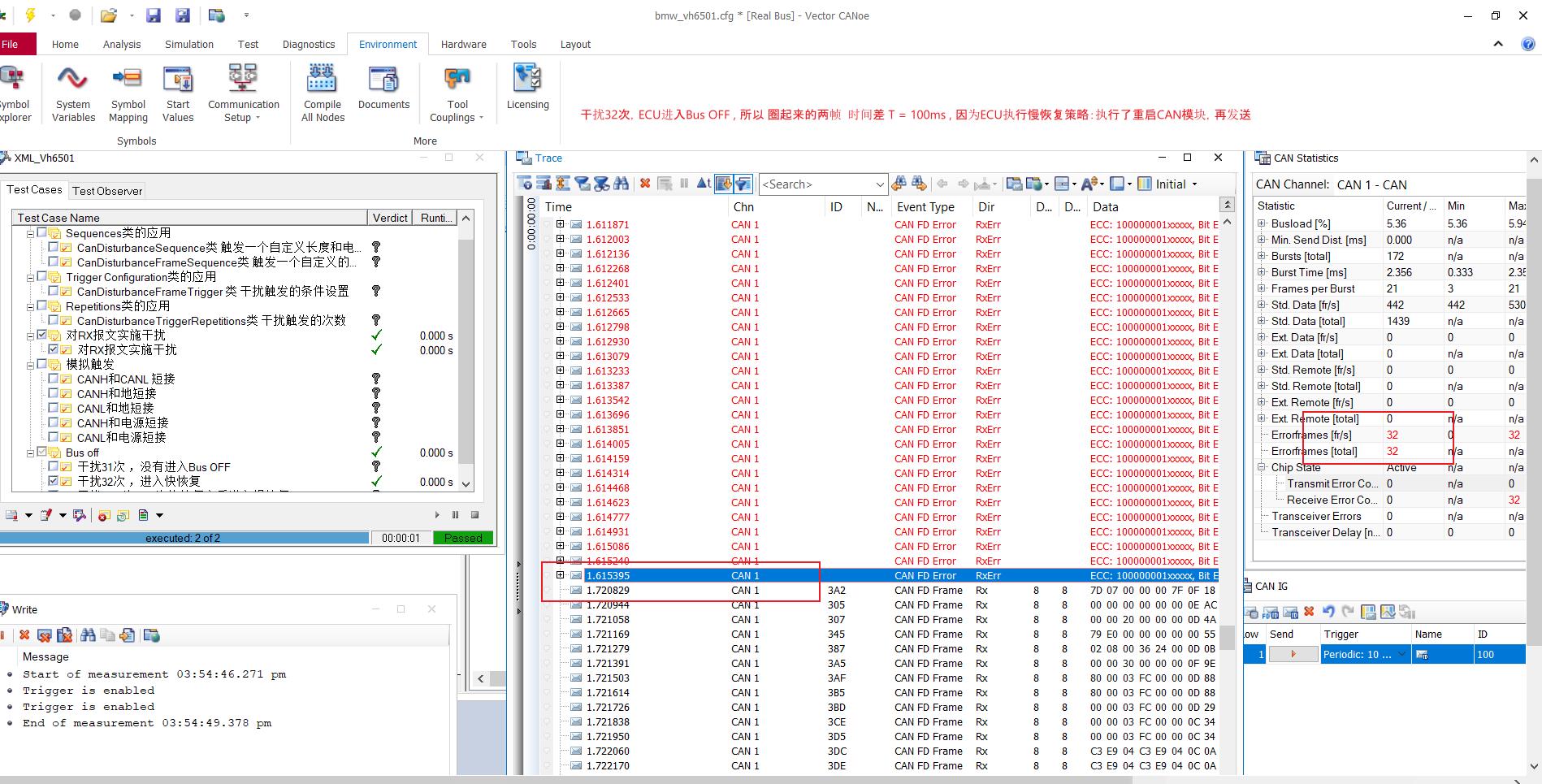
② case 2 : 连续错误帧32 ,则不进入bus off,观察下一帧发出的时间差
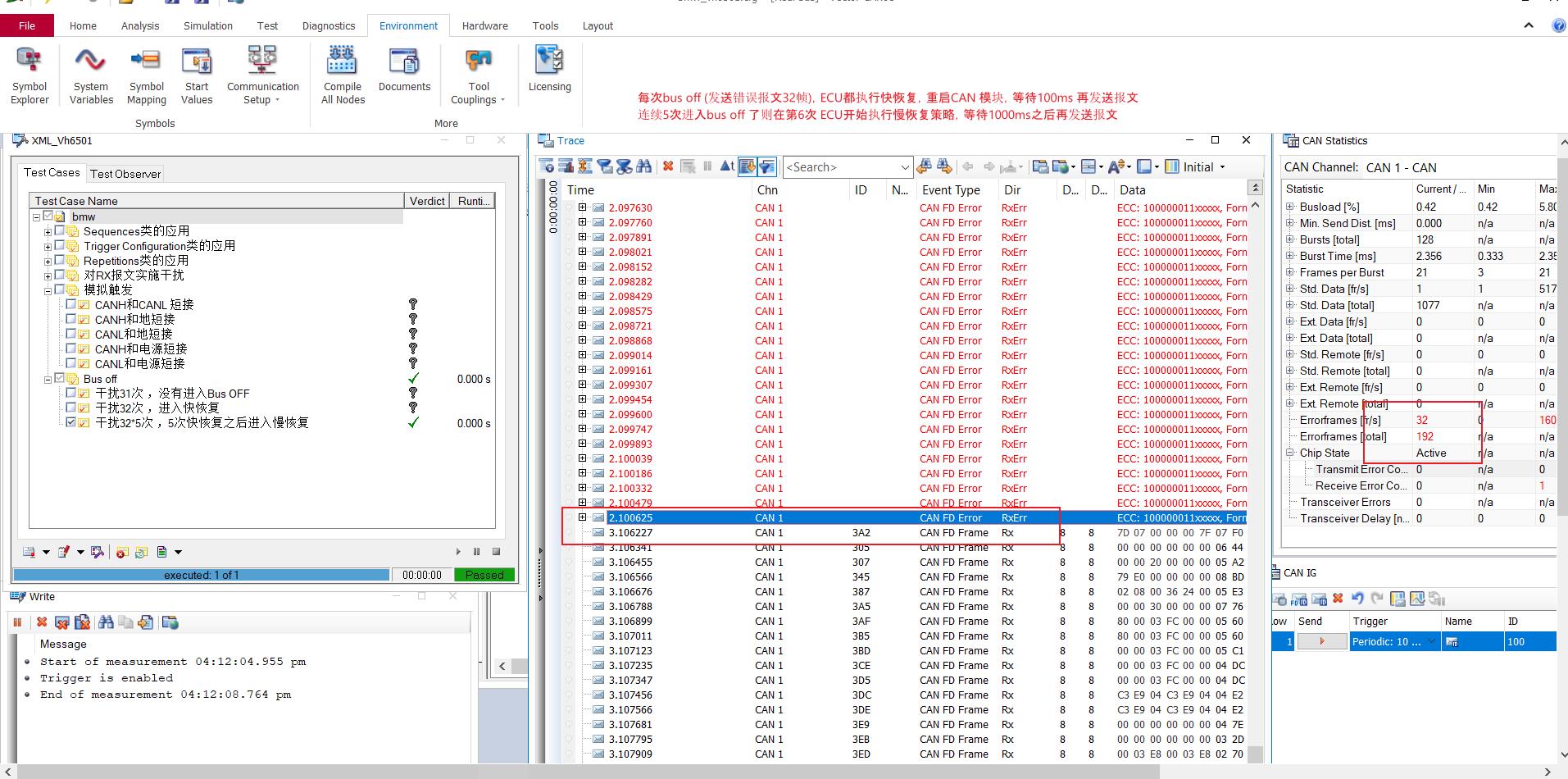
①③ case 3 : 连续错误帧192 帧,观察下一帧发出的时间差

总结
本章博客,讲解了Bus Off 的理解 以及使用VH6501进行 Bus Off 测试
更全面的VH6501学习请参考帮助文档和官方示例C:\\Users\\Public\\Documents\\Vector\\CANoe\\Sample Configurations 11.0.55\\CAN\\MoreExamples\\CANDisturbanceInterface


- 要有最朴素的生活,最遥远的梦想,即使明天天寒地冻,路遥马亡!
- 如果这篇博客对你有帮助,请 “点赞” “评论”“收藏”一键三连 哦!码字不易,大家的支持就是我坚持下去的动力。

以上是关于从零学习VH6501 —— Bus Off 的基本理解和测试用例设计的主要内容,如果未能解决你的问题,请参考以下文章