2.相机成像原理和数学模型
Posted 踟蹰横渡口,彳亍上滩舟。
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了2.相机成像原理和数学模型相关的知识,希望对你有一定的参考价值。
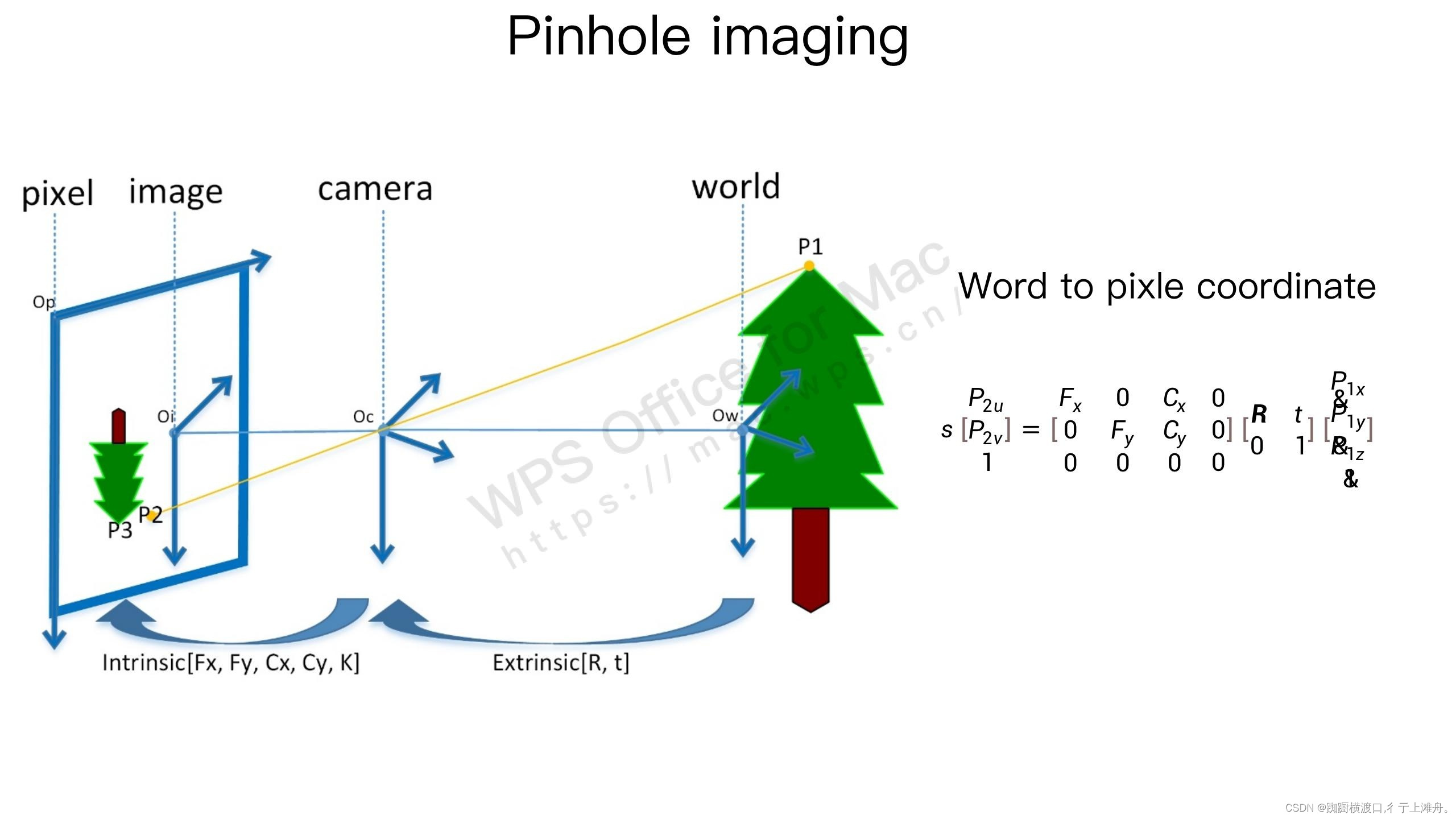
相机模型中的坐标系:
Ow-xyx:世界坐标系,物体位置,单位:m
Oc-xyz:相机坐标系,光心为原点,单位:m
Oi-xy:图像坐标系,光心为图像中心,单位:mm
Op-xy:像素坐标系,原点为图像右上角,单位:pixel
其中:
1)Fx和Fy为水平和竖直方向每毫米像素数
2)Cx和Cy为图像坐标系原点在像素坐标系下的位置
3)K为畸变系数k1,k2,k3,k4
4)R、t表示旋转和平息矩阵
5)点P1基于世界坐标系,P2为P1对应的像素坐标系的位置, P3为P2在畸变校正后的位置
6)Extrinsic是P1P2的外参参数,Intrinsic是P1P3的内参参数
1)径向畸变:透镜形状
2)切向畸变:透镜和成像平面的位置关系
成像流程的介绍
怎样把我们物理世界中的物体,映射到我们的像素坐标系
其实就是相加的内外参标定问
以上是关于2.相机成像原理和数学模型的主要内容,如果未能解决你的问题,请参考以下文章