自动驾驶Apollo源码分析系统,CyberRT篇:简述CyberRT框架基础概念
Posted frank909
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶Apollo源码分析系统,CyberRT篇:简述CyberRT框架基础概念相关的知识,希望对你有一定的参考价值。
1. CyberRT 是什么?
Apollo Cyber RT 是专为自动驾驶场景设计的开源、高性能运行时框架。 基于中心化计算模型,主要价值是提升自动驾驶系统的高并发、低延迟、高吞吐。
Apollo 并不是一开始就使用 CyberRT,在 v3.0 之前用的都是基于 ROS 框架进行开发。但在之前的版本中发现了很多问题,随着 Apollo 的发展,对最高水平的稳健性和性能的需求, Apollo Cyber RT 应运而生,它满足了一个面向商业化的自动驾驶解决方案的基础需求。
CyberRT 最明显的 3 个优点:
- 加速算法
- 简化部署
- 增强自动驾驶系统能力
本文的目的有 2 个:
- 弄清楚 CyberRT 的整体框架结构
- 弄清楚 CyberRT 内部大致协作机制
2. CyberRT 里面有什么?
CyberRT 是一堆庞大复杂的代码,因为我只是一个学习者,我事先也并不知道 CyberRT 的架构图,所以,也只能从代码中分析并从中找线索。
我注意到 Cyber 目录下有 cyber.h 这个文件,我认为它可能是最源头或者是最基础的元素,所以选择了从 cyber.h 入手。

这里面只有一个 CreateNode 方法,返回的是 Node 的引用。根据头文件引用及对代码的敏感性,刨去一些 log、time 之类的辅助类代码,我相信 CyberRT 中这些概念很重要:
- component
- node
- task
- timer
所以,研究 CyberRT 得到 CyberRT 全貌,我们可以从这些概念相应的代码入手。
2.1 Node
在 Node.h 文件中发现了很多有意义的东西。

注释中有提到一些关键信息:
- Node 是 CyberRT 的基础构件
- 任何 Module 包含相应的 Node
- Module 之间的通信也是通过 Node 进行交互
- Node 之间的通信可以设定不同的模式
- Read/Write 是一种 Node 之间的通信方式
- Service/Client 是另外一种 Node 之间的通信方式
另外,node 中的private属性指示了一些关键的成员变量
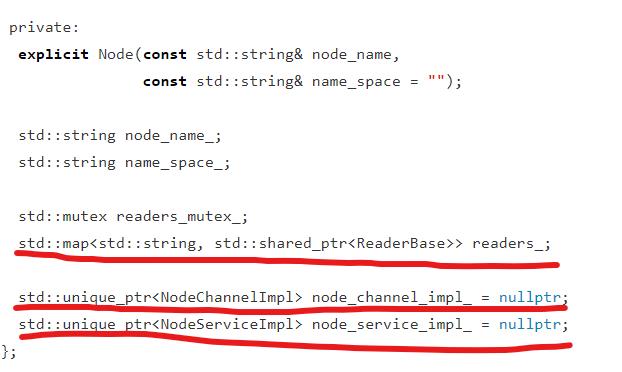
我们可以知道一个 Node 有一系列相关的 Reader。
也可以有相应的 NodeChannelImpl 和 NodeServiceImpl。
2.2 Reader
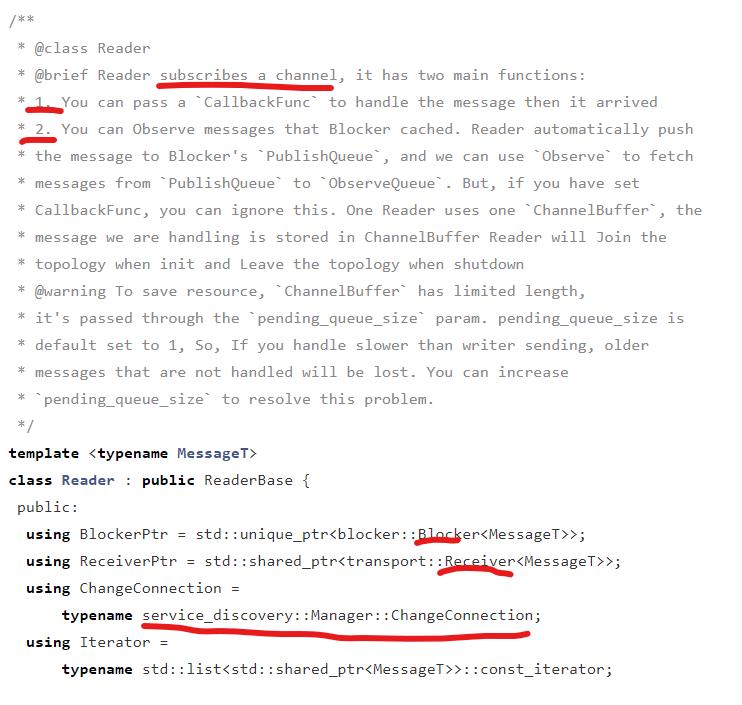
注释说了 3 点:
- Reader 通过订阅 Channel 获取信息
- 收到信息时会触发传递到 Reader 的回调 callback
- 也可以监听 Blocker 中的缓存信息

而上面的代码可以告诉我们,Reader 会和一种 Topology 网络发生关系,可以加入,也可以卸载。
并且, Reader 和 Channel 是相关联的,由 ChannelManager 进行管理。
2.3 ChannelImpl
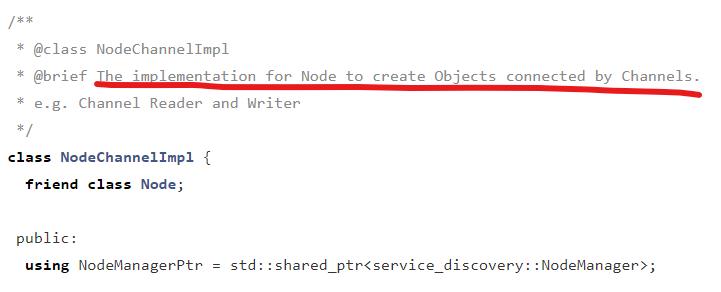
Channel 是 Node 之间通信的桥梁,用来给 Reader 和 Writer 之间建立通信。
2.4 TopologyManager
前方讲到 Reader 会和一种 Topology 网络发生关系,可以加入,也可以卸载。其实 Writer 也一样。所以,我们仍然需要去观察与 Topology 相关的类。
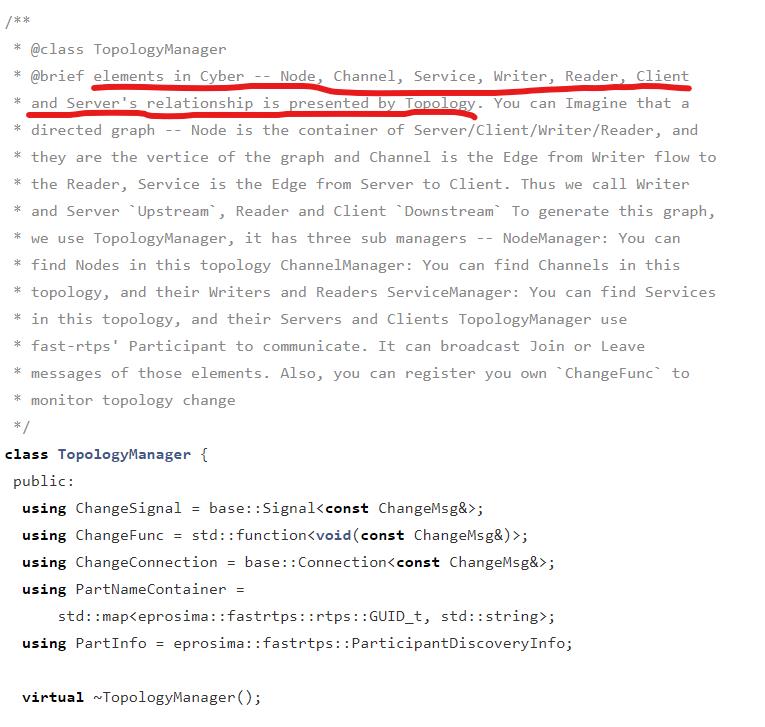
注释里面写明白了我想要的东西:
- CyberRT 中的元素之间的关系由 Topology 呈现
- Topology 相当于一个有向图 DAG
- Node 是 DAG 中的顶点
- Channel 是 Writer 流向 Reader 的边
- Service 是 Server 流向 Client 的边
- Topology 是由 TopologyManager 生成的
- TopologyManager 内容有 3 个子 Mannager:NodeManager、ChannelManager、ServiceManager
- NodeManager 是来查找 Node 是否在 Topology 当中
- ChannelManager 用来查找 Channel 是否在 Topology 当中,以及对应的 Writer 和 Reader
- ServiceManager 用来查找 Service 是否在 Topology 当中,以及对应的 Server 和 Client
- TopologyManager 依靠 fast-rtps 进行通信 ,可以监听元素加入和离开 topology 网络
- 可以自己注册 ChangeFunc 来监听 Topology 网络的变化
所以,大概可以得到下面的示意图。

有了这张图基本上就可以解释 CyberRT 中大多数内容了,但是我注意到前面 Node 中有 Component 和 TimerComponent 的存在,所以,还需要去看看它们到底是什么。
2.5 Component
Component 的基类是 ComponentBase。
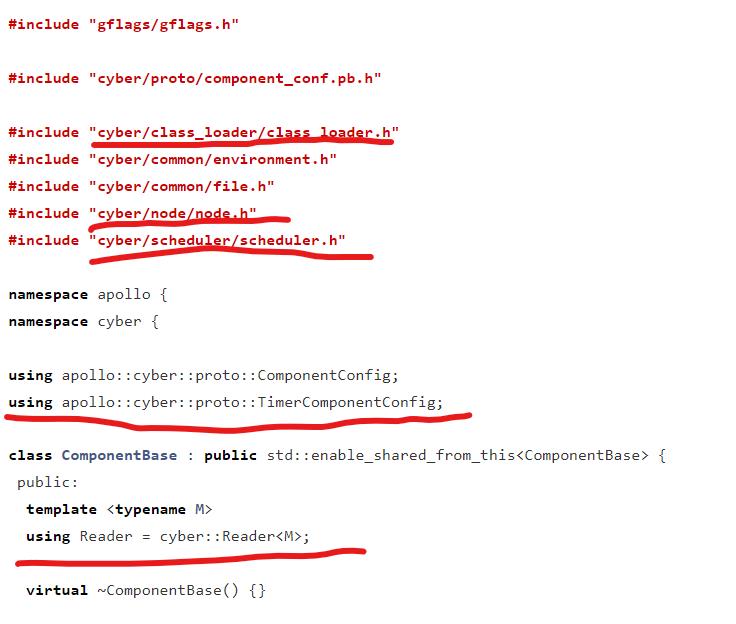
从相应的头文件可以看到一些信息提示:
- Component 可以通过一些 .proto 配置
- class loader 可能会加载它
- 内置 Reader
- 有相应的 Node
- 通过 Scheduler 进行调度
我们接下来看 Component 相关的头文件。
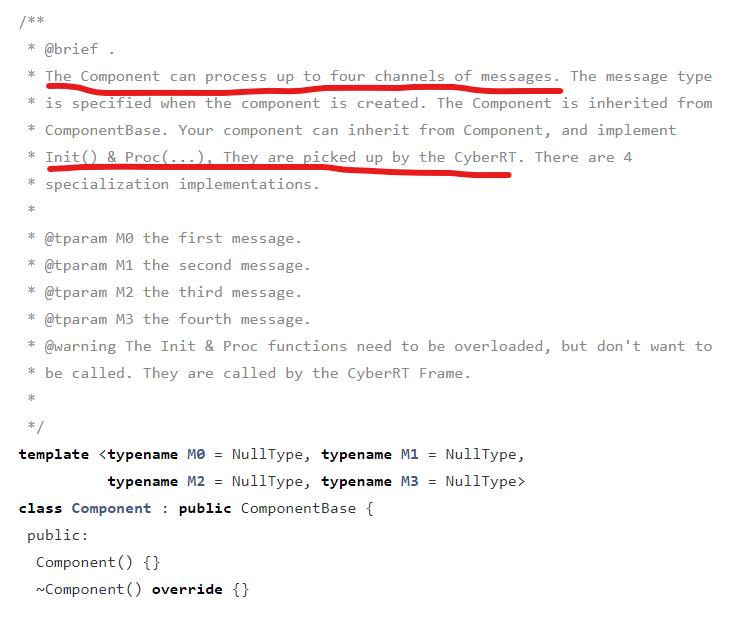
感谢 CyberRT 的开发者,关键代码注释的很明白。
- 一个 Component 最多可以支撑 4 个 Channel 进行消息处理
- Component 继承自 Component,开发者可以自定义 Component,只要继承 Component 并复写它的 Init() 和 Proc()
- Init 和 Proc 的调用是由 CyberRT Frame 驱动的,不要主动去调用它们

Initialize 由 protocol 文件进行配置。
Proc 是一个 Component 的逻辑处理单元,包含 4 个参数,分别代表 4 个 channel 的消息。
2.6 TimerComponent
看名字就知道它是一个定时器组件。
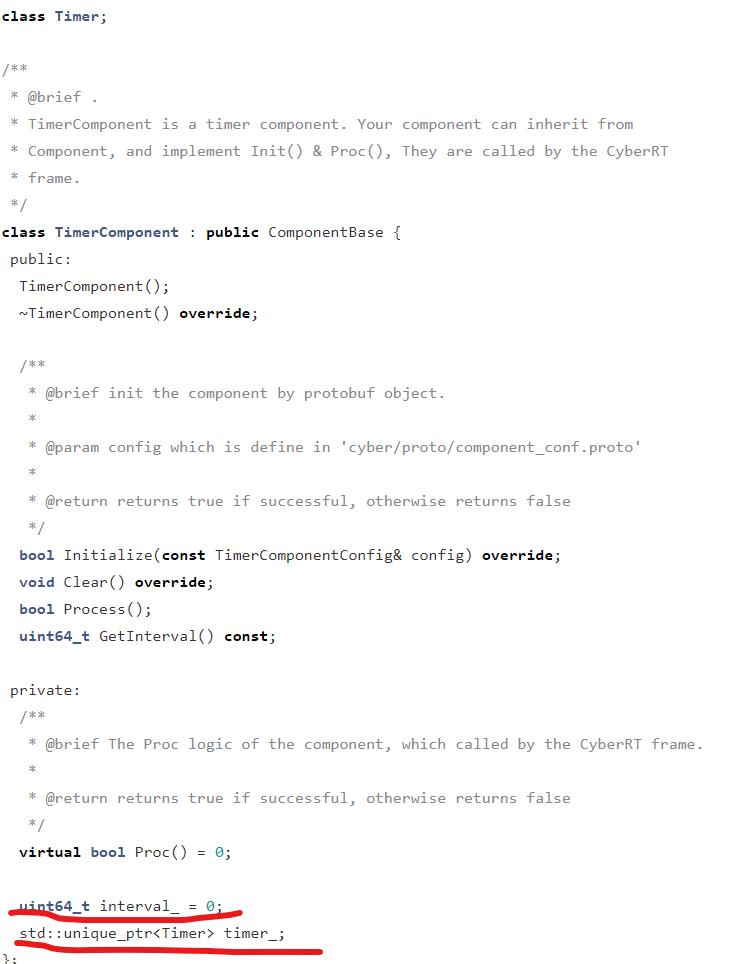
TimerComponent 同样继承自 ComponentBase,不过内部有一个定时器 Timer。
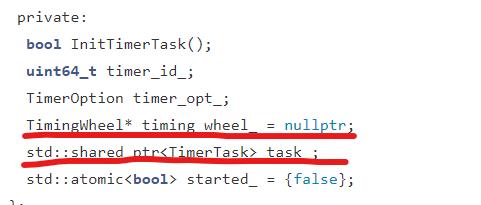
Timer 的内部又有两个关键成员变量类型 TimingWheel 和 TimerTask,顾名思义是定时器时间轮换和定时器任务相关的类。
问题是谁触发 TimerTask 呢?
我们很空间想到调度器,而 CyberRT 代码中也正好有一个 scheduler。
问题是 scheduler 又是谁触发的呢?
2.7 scheduler
在一个线团中去找线头是件很难的事情,所以,需要借助于猜测。
我猜测整个 cyberRT 的起源是 init.c 这个文件。

出现了 scheduler 的身影,但这里是设置 log 相关的线程。
所以,我将目光移到 SysMo 上。

SysMo 创建的时候会建立一个线程,里面执行一个 while 循环,然后每次调用 scheduler 的 CheckSchedStatus 方法。
所以,我们终于可以去阅读 scheduler 相应的代码了。

它是一个工厂类,根据策略不同有 SchedulerClassic 和 SchedulerChoreography 两种实现,我在这随便挑选一种也就是 SchedulerClassic 看看它内部长什么样子。
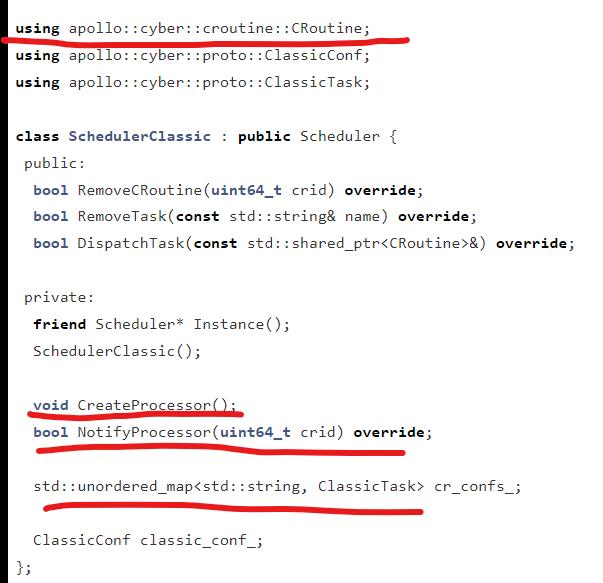
看它的头文件可以发现一些关键要素:
- 采用协程调度
- 内部会创建 Processor,并会定期触发通知信息
- 有一些 ClassicTask,可能代表常规的任务
但聊聊约约我察觉到代码路径离我的目标越来越远,我其实关注的是如何找到 Node 和 Component 的源头,它们是如何被周期触发 proc 方法的。
于是我跳出代码森林,重视审视整个代码目录,然后发现了 mainboard。
2.8 mainboard
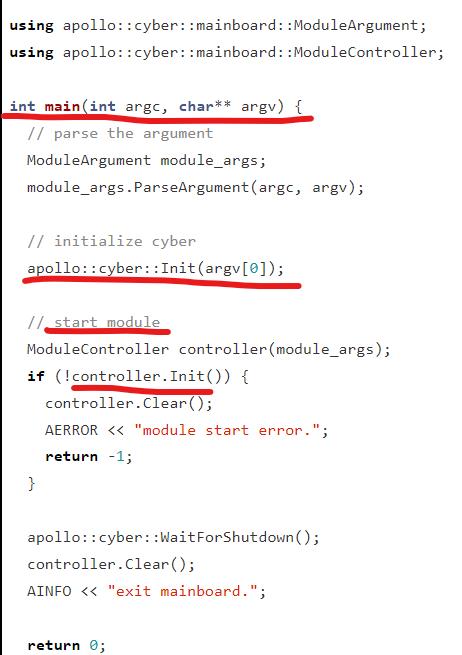
发现新大陆了,原来 mainboard 是 cyberRT 的入口,init 方法都在这里触发。
Module 也在这里启动。

ModuleController 几乎藏了我想了解的答案。classloadermanager、componentbase、dag。
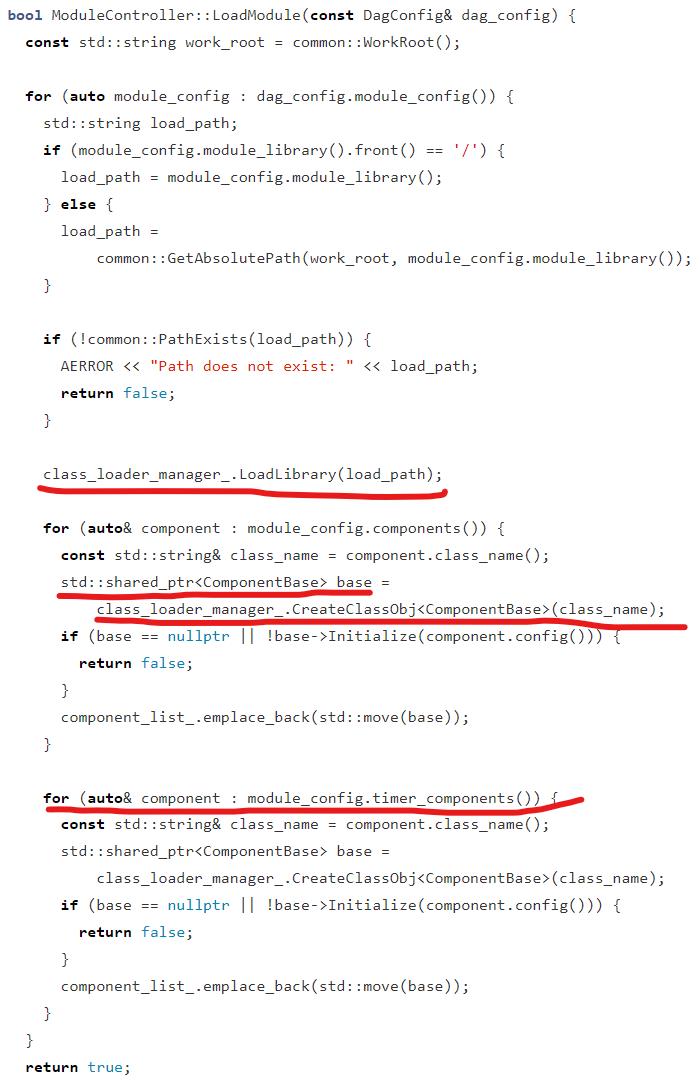

class_loader_manager 创建相应的 Component 和 TimerComponent 并对它们进行初始化。

Component 前面的文章讲过,但现在需要关心的是它和 Scheduler 的关系。

在 Component 的 Initialize() 中,Scheduler 会根据 Node 的名字创建一个 Task
2.9 再看 Scheduler
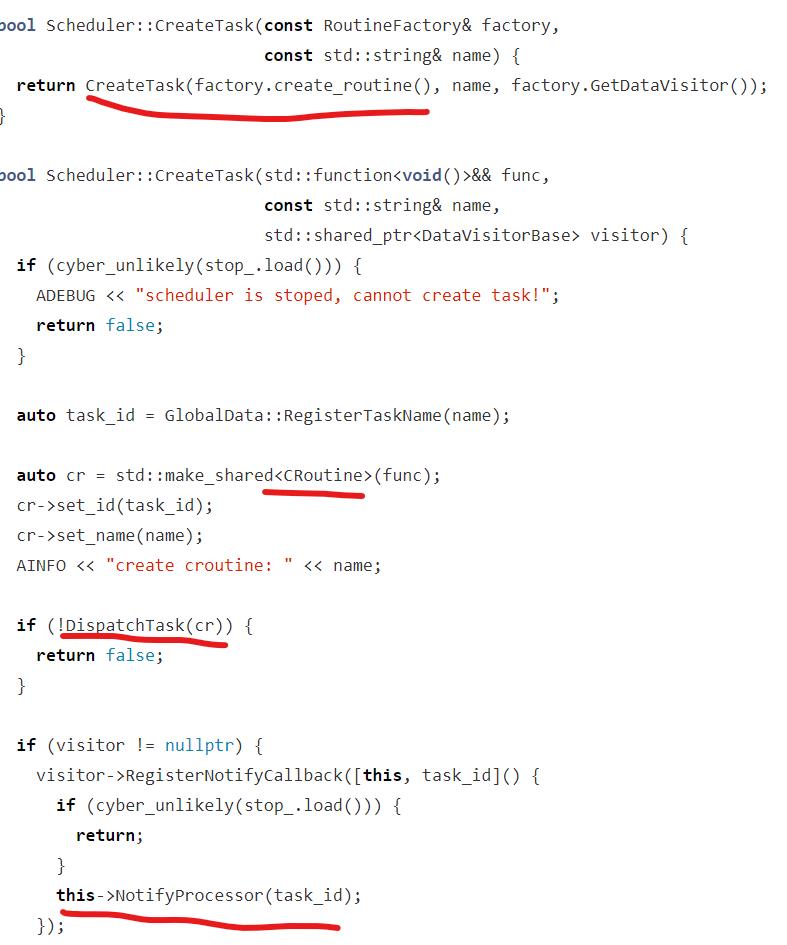
Scheduler 会将 node 与 CRoutine 建立联系,然后与 Processor 也建立联系。
核心点在于 cr,它是协程单元,在 Component 中通过 RoutineFactory 创建。
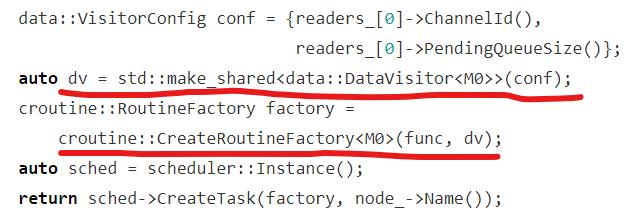
Routine 是配合 DataVisitor 使用的。
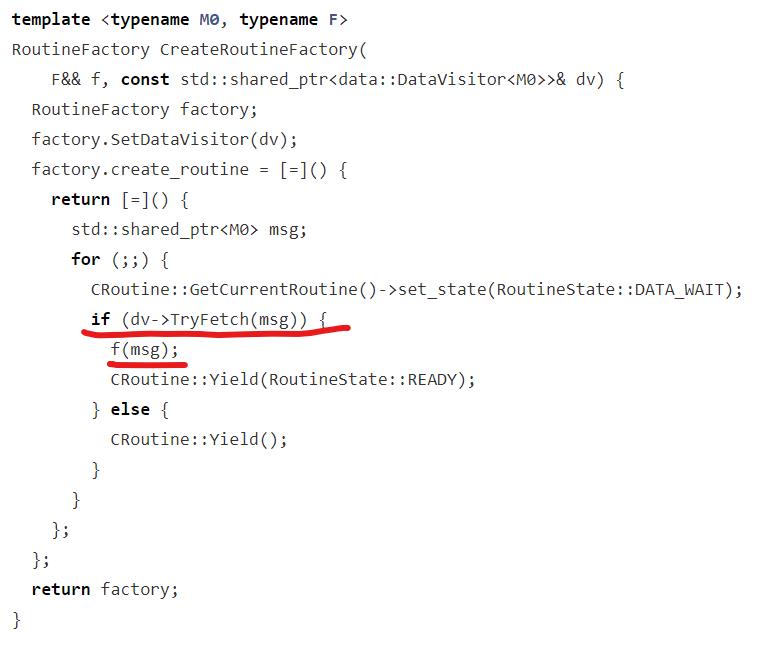
routine 中会创建一个 for 循环,通过 datavisitor 不断去抓取消息,如果有消息则调用 f() 函数处理,否则通过 Yield 将执行权让度出来。
那么 f 函数是什么呢?它是在 CreateRoutineFactory 传递进来的。 源头是 Component 中的 func。
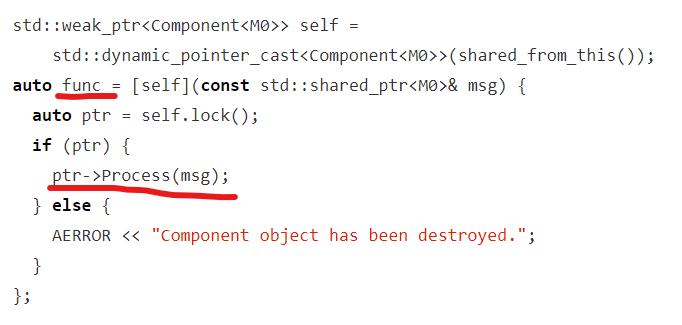
这是一段函数式编程,最终核心逻辑其实是调用 Component 中的 Process(),真相已经很接近了。
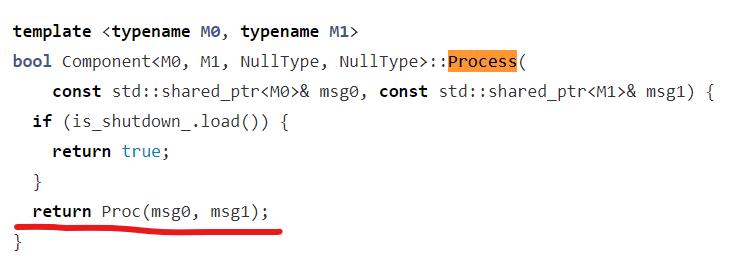
Process 中调用 Proc() 方法处理消息,也是本文要探究的目的,整个 CyberRT 的流程包括如何创建 Component,Component如何被消息驱动大致流程都明白了。
当然,与 Component 对应的是 TimerComponent,它应该是定时驱动而不是消息驱动。下面小节,开始分析它。
2.10 Timer
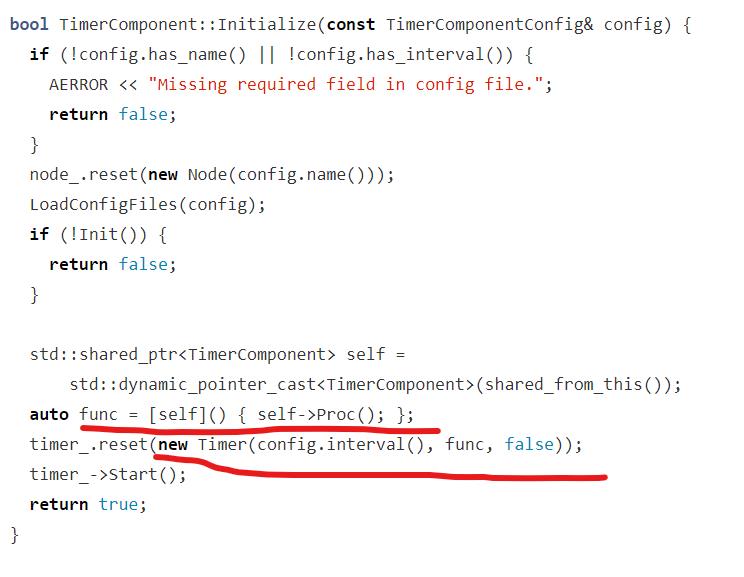
Timer 是在 TimerComponent 中的 Initialize 中被实例化,传入了定时周期和回调函数 func。
func 本身其实是调用 TimerComponent 的 Proc()。
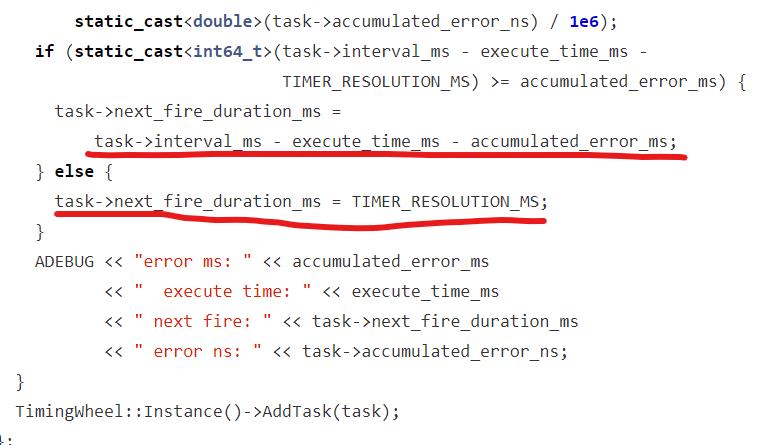
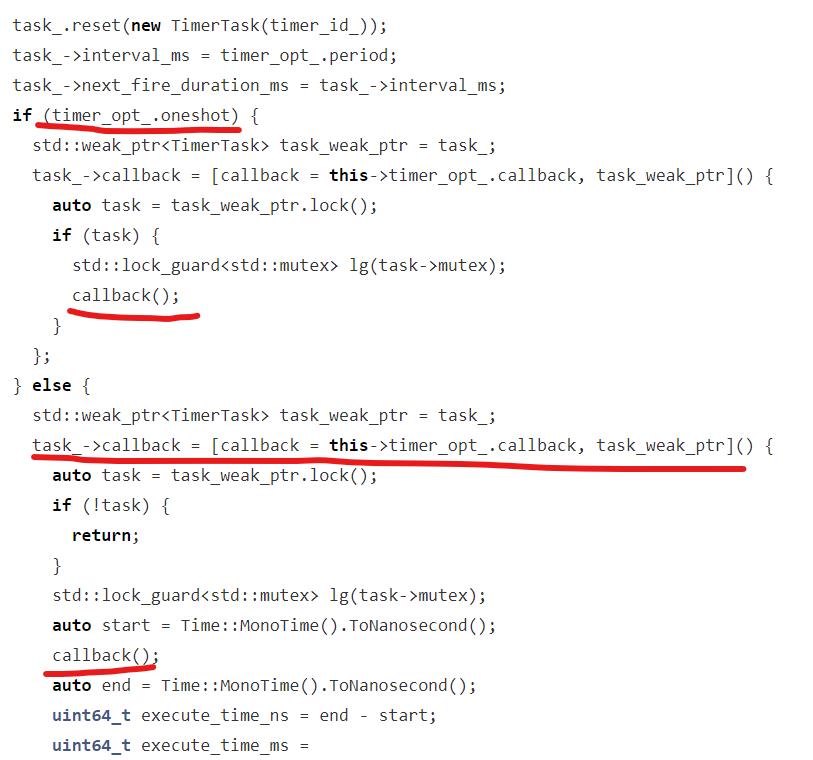
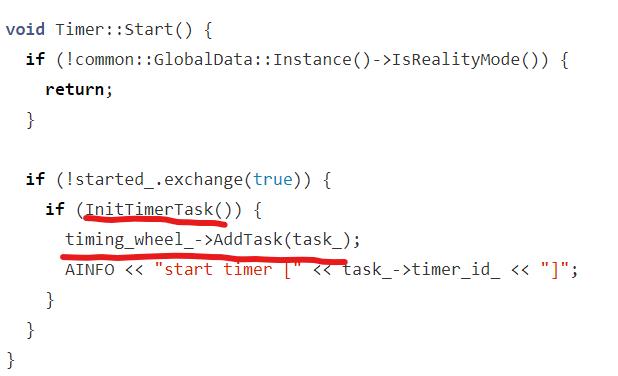
最终 Timer 会将 TimerComponent 中的 Proc 当成 callback 封装成 TimeTask,并设置它们的触发时间,然后添加到内部的 TimingWheel 当中进行任务轮换。基于篇幅,TimingWheel 不再详细分析,因为到此,TimerComponent 的回调函数触发逻辑也已经清楚了。
2.11 CyberRT 整体框架全貌
经过前面小结的分析,可以发现 CyberRT 还是比较复杂和庞大的,研究 CyberRT 一些核心的类展示如下:

-
核心类是 Component 和 TimerComponent
-
支撑 component 的是 Node、Scheduler、Timer、DataVisitor
-
其他的 Reader、Writer、ChannelImple、TimerTask 等等是具体的细节相关类
当然,全部的 CyberRT 不止上图中列出的这些,本文关注的是概貌,细节后续针对某些功能单独分析。
3. CyberRT 的协作机制是什么?
在梳理 CyberRT 相关的类时,其实流程已经基本上弄明白了。
主要的流程有 2 个:
- Component 和 TimerComponent 的创建过程
- 它们的消息触发机制
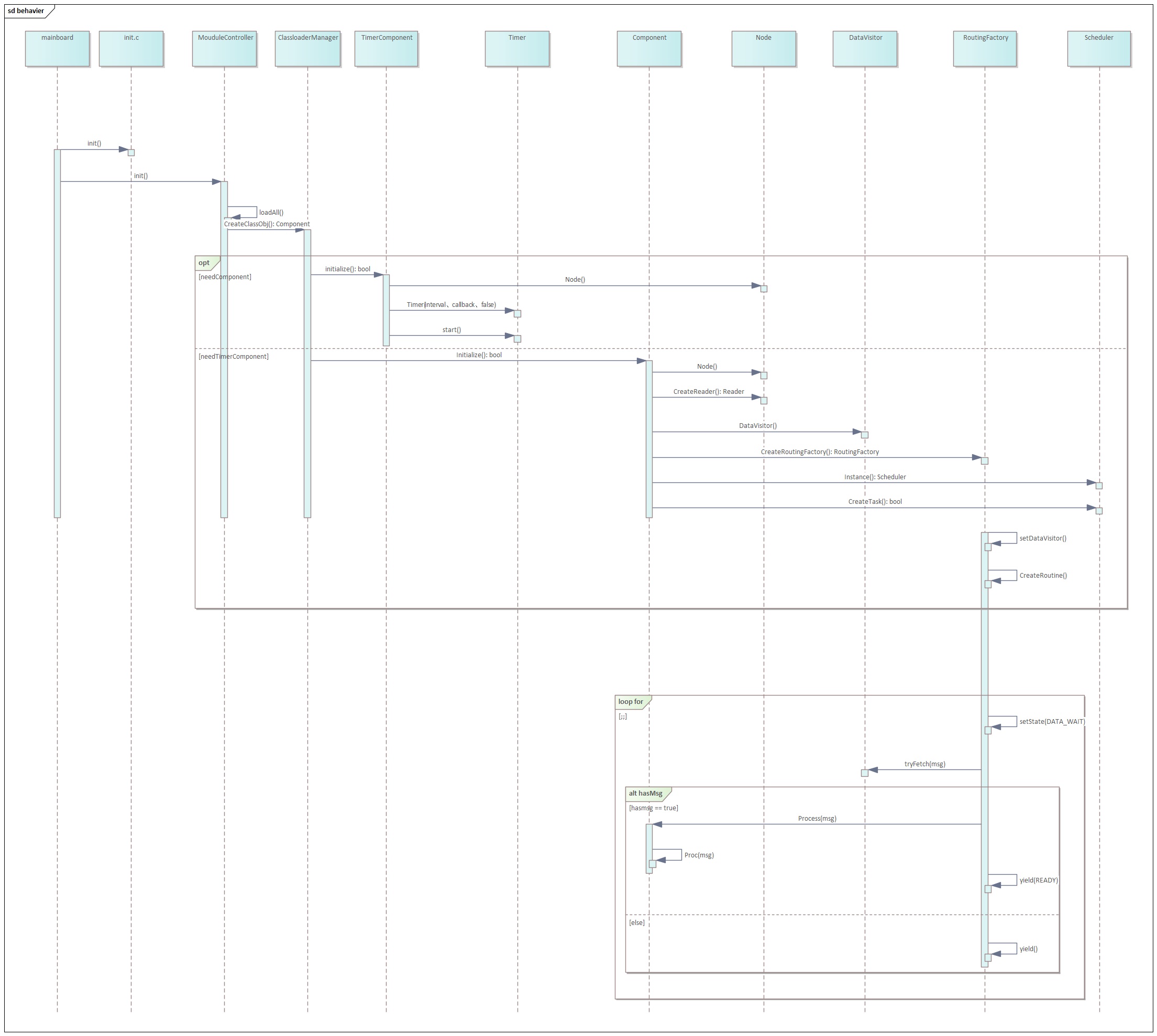
上面的图显示了 CyberRT 创建流程和 Component 消息驱动简单的逻辑,我们可以通过它一览 CyberRT 的基本逻辑,而更精细化的场景则需要更仔细阅读和思考代码,这在后续文章中会陆续分析。
4. 总结
CyberRT 确实很复杂,但经过初步的代码快速阅读,我们可以发现其实它的底层原理也挺简单的。
- CyberRT 是基于 Fast-RTPS 进行消息驱动的,所以业务模块可以基于此进行数据通讯,这个和 ROS2 没有多大差别;
- CyberRT 通过 Node 节点进行通信的底层对接,而 Component 则负责具体业务相关的逻辑;
- CRoutine 基于消息驱动的基础上,将 Component 中的 Proc 回调作为基础的协程执行单元,然后根据 Sheduler 相应的调度策略进行调度,它保证了多任务的执行顺序,但我自己也有个疑问的地方,它能保证进程级别的正常调度吗?
- TimerComponent 依靠 Timer 进行定时触发,它的 proc 方法被封装成为 TimeTask 中的回调,TimingWheel 根据调度策略进行定时任务执行;
- CyberRT 强大之处在于它的 3 个拓扑网络,基于 fast-rtps 通过服务发现,能够快速找到相应的 Node 状态,也因为这个特性,这在我之前分析的系统监控 Monitor 中,能够轻松监控每个模块的健康状态。
以上是关于自动驾驶Apollo源码分析系统,CyberRT篇:简述CyberRT框架基础概念的主要内容,如果未能解决你的问题,请参考以下文章