一文了解自动驾驶世界格局
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了一文了解自动驾驶世界格局相关的知识,希望对你有一定的参考价值。
参考技术A自动驾驶前夜
为了让广大家庭的用户更加了解自动驾驶领域,我们开启了先锋系列的话题。我们将对不同领域的头部公司进行访谈,对这些头部公司的研究初衷、研发历程、研发现状和未来方向进行全面报道,让用户了解自主驾驶领域在国内和国际上处于什么样的状态。我们是否有能力在自动驾驶技术上自信,中国是否会在这个领域被别人控制,最终让大家知道中国在自动驾驶领域的优势和劣势,希望影响更多的人了解这个行业。
自动驾驶前一晚
自动驾驶进入了快速发展的道路。在揭开自动驾驶的帷幕之前,我们有必要回到源头,从根本上了解自动驾驶或无人驾驶 汽车 诞生的 历史 背景。
自动驾驶的 历史 还是从美国开始的。现代信息技术最早开始于20世纪60年代,这是一个 社会 大变革的时代。第二次世界大战的阴云刚刚退去。得益于美国在20世纪建立的制度框架,政府在政策上可以大规模吸引专业领域的专家。因此,美国在科学和工程领域积累了丰富的人力资源。
现代信息技术不再是一个神秘的“东西”,而是真正围绕群众而来,这也是现代信息技术发展的第二阶段。
随着互联网人口的快速增加,信息技术的发展已经到了第五阶段。这也是我们目前正在经历的阶段。目前,互联网普及率已经达到60%,仅中国网民数量就高达8.29亿。互联网用户快速增长的背后是个人移动设备的普及,我们已经逐渐完成了从个人电脑到个人移动便携移动设备的过渡。
人们很快接受了互联网技术对生活和经济模式的改变。可以说,现代信息技术发展的第五阶段极大地改变了我们对互联网的需求和获取。
自动驾驶的出现将开启一个新的阶段,因为自动驾驶不是单一的技术,而是大量高端技术的集合,所以它也会带来很大的变化。根据官方预测,只有 汽车 产业数字化转型才能产生670亿美元的价值, 社会 效益可达3-4万亿美元。
自动驾驶将会给整个 社会 和 汽车 行业带来巨大的变化和影响。目前我们头疼的交通拥堵、高速公路事故频发、停车难、空空气污染等问题,随着自动驾驶的到来,将会得到颠覆性的改善。
自动驾驶的演进
如果说现代信息技术的发展间接推动了自动驾驶的发展,那么不同国家的政策、地理环境和技术积累直接导致了现代自动驾驶格局的形成。
人类的想象力总是如此狂野。早在1925年,美国发明家弗朗西斯·胡迪娜就提出了自动驾驶 汽车 的想法。
然而,这些都是想法或不成熟的实验。目前,自动驾驶领域公认的自动驾驶起源实际上来自一个名为DARPA的无人驾驶挑战。
比赛的完成条件看起来并不苛刻,只要能在莫哈韦沙漠中行驶142英里就行,但前几届的情况是没有挑战者能完成比赛。
同时,这种竞争也间接促进了很多公司的成长。激光雷达领域的领导者威力登就是其中之一。威力登最初成立于1983年,是一家音频设备制造商,霍尔先生是这家公司的首席执行官。
一般来说,无人驾驶 汽车 或自动驾驶在2000年后的十年里非常不成熟,因此在2000-2010年期间发展自动驾驶非常困难。而且,从商业和投资圈的角度来看,自动驾驶在当时似乎是海市蜃楼,商人在谈及科幻电影时往往会想到无人车或自动驾驶。
人们开始意识到,人工智能或更进一步,自动驾驶或无人驾驶 汽车 不是未来100年后的产品,也许它会比我们想象的来得更早。
除了 社会 因素,各行各业的推动也是其背后不可忽视的力量。比如通用 汽车 在2021年收购Cruise,同时向Lyft投资5亿美元,支持自动驾驶的研发。除此之外,在那一年,谷歌将自动驾驶 汽车 项目独立出来,并建立了著名的Waymo,从某种意义上来说,这使得2021年成为自动驾驶的第一年。
中美争霸初现端倪
自动驾驶的世界格局
经过多年的发展,自动驾驶世界的格局正在变得清晰。目前大致可以从国家和地区来划分,技术路线也日渐清晰。一般来说,自动驾驶领域在世界上分为四个主战场,即中国、美国、日本和欧洲。已经在幕后操控了,细细品味很有意思。
日本和欧洲
先来看看日本和欧洲,现代 汽车 工业比较强。其实把两者放在一起不太合适,因为欧洲和日本对待自动驾驶还是有区别的。
1)欧洲:碎片化阻碍自动驾驶发展。
自动驾驶技术在欧洲的发展受到诸多制约,这与欧洲的地理和政治形势密切相关。
你可能会说英语是世界通用语言,但你会发现,其实欧洲各大国家都有各自独立的语言,这也意味着会出现不同的思维方式和文化。
这些都制约了欧洲自动驾驶的发展,所以你会发现欧洲的老供应商可能掌握了一些细分的自动驾驶技术。然而,从自动驾驶行业的角度来看,欧洲的发展并不顺利。当然,更重要的一点是,欧洲人对自动驾驶的接受程度远不如中国和美国。
因此,对于欧洲来说,无论是车企还是老牌供应商,都将更多地押注于中国和美国。
2)日本:技术保守,自成体系,市场发展有限。
如果说欧洲过于碎片化对自动驾驶的发展造成阻力,那么对于日本来说,小市场就是制约日本发展的重要因素。
只有足够大的市场才能保证百家争鸣的出现,也只有百家争鸣,竞争对手多了,才能保证有优秀的企业从中脱颖而出,最终让自动驾驶行业更加成熟。
当然,日本在自动驾驶领域也有优势。首先,在政策方面,我们知道人口老龄化是很多国家都会面临的问题,尤其是日本。根据日本《产经新闻》的报道,到2060年,日本65岁及以上人口将占日本总人口的40%,这些老龄化人口中有三分之一将面临出行问题,自动驾驶的广泛应用将解决这一群体的出行问题。
目前,日本议会正在审议《道路交通法》修正案,允许L3级自动驾驶 汽车 在道路上行驶。在紧急情况下改为人工驾驶的前提下,允许驾驶员玩手机等“一心一意开车”。此外,日本政府还表示,到2025年将在所有高速公路上实现自动驾驶,并允许卡车公司建立自动驾驶货运车队。
除了政策支持,日本企业也在加大对自动驾驶的投入,同时推动联盟的形成。其中,以丰田为首的日系车企和供应商加速了对自动驾驶初创企业的投资和收购,同时在技术方面不断加快车联网、自动驾驶平台等方面的部署和研发。
中国和美国
1)美国:既是自动驾驶的起点,也是技术积累和资本最丰富的国家。
与欧洲和日本在自动驾驶领域的“低调”相比,中国和美国在自动驾驶领域绝对是可圈可点的。
让我们从美国开始。自动驾驶起源于美国,所以美国拥有丰富的人才积累,所以人才是美国在自动驾驶领域的第一优势。事实上,现代信息技术各个发展阶段的本质也是美国技术迭代的过程,这使得美国在自动驾驶领域拥有足够的权威和话语权。
此外,谷歌的优势不仅在于它的早期研究,还在于它的全面性。我们知道自动驾驶是很多技术的集合,对于谷歌来说,它有很多部门,很多黑 科技 。
如果说“条条大路通罗马”,那么出生在罗马自然有很大的优势。综合这些因素,谷歌能够在自动驾驶方面获得优势是合乎逻辑的。
如果不出意外,美国在自动驾驶领域将始终保持较高的发展速度和领先水平,但这次疫情确实影响了美国自动驾驶行业和相关业务的 探索 。AutoX创始人肖博士就疫情对美国的影响发表了自己的看法。首先,在自动驾驶方面,目前自动驾驶测试车需要通过大量的道路测试来验证算法,足够的数据可以保证算法的提升。但是美国对这次疫情的控制真的很差,导致大量的人不得不连续呆在家里,停工停产,也导致城市行人很少,道路非常空荒芜。这样的路况对于自动驾驶的测试价值不大,事实也是如此。肖熊健博士认为,至少在疫情结束之前,这种情况不会结束,而疫情结束是相对落后国家迎头赶上的好时机。
另一方面,作为一个车轮上的国家,传统的美国 汽车 市场非常巨大,人均 汽车 拥有量也非常高。疫情之下,美国人更倾向于买车,曾经在美国非常流行的共享 汽车 开始被冷落。这种情绪对于出租车行业来说并不是好消息。对于自动驾驶来说,无人驾驶出租车其实是目前公认的可以商业化的项目,但疫情带来的心理恐惧也会对无人驾驶出租车的推广产生影响,导致无人驾驶出租车市场萎缩,让投资者更加谨慎。
总的来说,美国自动驾驶的技术积累很强,而人才培养体系成熟,具有较强的先发优势和较大的市场。但是疫情减缓了美国自动驾驶的发展,留下了一定的空窗口。同时,市场波动也影响了自动驾驶市场的投资。
2)中国:后起之秀
在自动驾驶领域,中国的R&D 历史 与美国显然有很大差距。然而,从发展的角度来看,中国和美国非常相似。
与美国相比,中国的自动驾驶研究起步较晚,但仍有自己的优势。首先是人才。美国顶尖大学中有大量的中国学生,他们接受了美国最好的教育,尤其是在自动驾驶领域,这是很多中国学生选择的方向,所以中国在人才库方面有很好的优势。
二是资金优势。与美国市场相比,国内市场也有足够的资金支持自动驾驶等长期和长期的投资项目。三是内部环境缺乏竞争。美国确实有谷歌等一系列高端玩家,但竞争势必会更加激烈。目前国内真正有实力的自动驾驶公司并不多。毕竟大家都开始晚了。虽然2015年到2021年可以拉开一定的差距,但整体差距并不是很明显,也不会有谷歌这样的巨头。这为更多初创的自动驾驶公司提供了良好的发展环境,对创业者来说是千载难逢的机会。
第四家中国自动驾驶企业的疯狂追赶。国内的 科技 公司在自动驾驶领域真的很有竞争力,无论是技术还是路试里程,都牢牢地跟在美国后面。比如上面提到的路试,我们之前提到过,谷歌很早就开始了自动驾驶的研究,所以他们积累了大量的路试数据,到2021年,Waymo路试总里程将超过2000万公里。
虽然国内公司差距很大,但是很紧。路试里程方面,Waymo其次是国内公司百度和文远智星,其中百度数量最多。到2021年,路试里程达到200万公里,比2021年增长14倍。
在技术方面,表现也是突飞猛进。加州车辆管理局每年发布的自动驾驶接管报告被视为风向标之一。该报告记录了在加州测试自动驾驶 汽车 的 汽车 制造商、 科技 公司和初创公司提交的年度信息。同时,它反映了这些公司当年的行驶里程和人类司机接管 汽车 的数量,从而计算出每次人类干预发生时 汽车 的行驶里程。这个指标直接反映了自动驾驶技术的可靠性和自动驾驶能力。
2021年报告显示,在提交报告的48家公司中,谷歌旗下的Waymo和通用 汽车 旗下的Cruise在接手前,在里程数上占据绝对领先地位。但到了2021年,前十名公司中有四家来自中国,百度成为第一名,前一年的冠军Wamyo这次屈居第二。AutoX、马骁智星进入前五,滴滴进入前十。这意味着中国企业已经和美国顶尖 科技 公司展开了一场真正的较量,他们之间的较量势必是中国自动驾驶技术和美国自动驾驶技术的较量。
同时,在硬件方面,中国完备的供应商体系也是保证自动驾驶在中国发展的必要条件。比如激光雷达,在自动驾驶中非常重要。
这些中国激光雷达公司虽然起步较晚,但进步很快,依靠中国完整的供应链体系,可以带来更有竞争力的价格。目前,美国多家顶级自动驾驶公司也开始与中国激光雷达供应商合作。在中国威力登投资的百度,甚至用禾赛的产品替换了旗下Robotaxi使用的所有激光雷达,可见中国产品完全有能力与国外顶级激光雷达PK。
目前世界自动驾驶格局就是这样一个现状。从目前的格局来看,日本和欧洲虽然有一定的技术储备,但市场和地理环境限制了他们的发展,甚至路试都慢了一步。美国依然强大,但疫情让美国的发展充满未知。相比之下,我国疫情稳定,复工复产全面推进。在自动驾驶领域,我们和美国的差距越来越近。如果我们能够在自动驾驶领域实现超车,那么中国市场将会有一个光明的未来。
一文详解自动驾驶的动态驾驶任务(DDT) | 自动驾驶系列
文章版权所有,未经授权请勿转载或使用

本系列上篇文章《一文详解自动驾驶的运行设计域(ODD)》解读了什么是自动驾驶ODD,本篇文章依据SAE J3016详细解读自动驾驶DDT、DDT fallback、OEDR概念,后续两篇文章将介绍低速自动驾驶(LSAD)和驾驶自动化分级。
全文3800字,预计阅读8分钟
文 | 吴冬升
01
动态驾驶任务DDT概念
动态驾驶任务DDT(Dynamic Driving Task)是在道路交通中操作车辆所需的所有实时操作和策略功能,不包括行程安排和目的地和航路点选择等战略功能,包括但不限于以下子任务:
a) 通过转向控制车辆横向运动(操作);
b) 通过加速和减速控制车辆纵向运动(操作);
c) 通过目标和事件检测、识别、分类和响应准备(操作和策略)监控驾驶环境;
d) 对象和事件响应执行(操作和策略);
e) 机动规划(策略);
f) 通过照明、鸣笛、信号、手势等(策略)增强醒目性。
其中子任务c)和d)统称为对象和事件检测与响应(OEDR)。下图显示了驾驶任务的示意图。
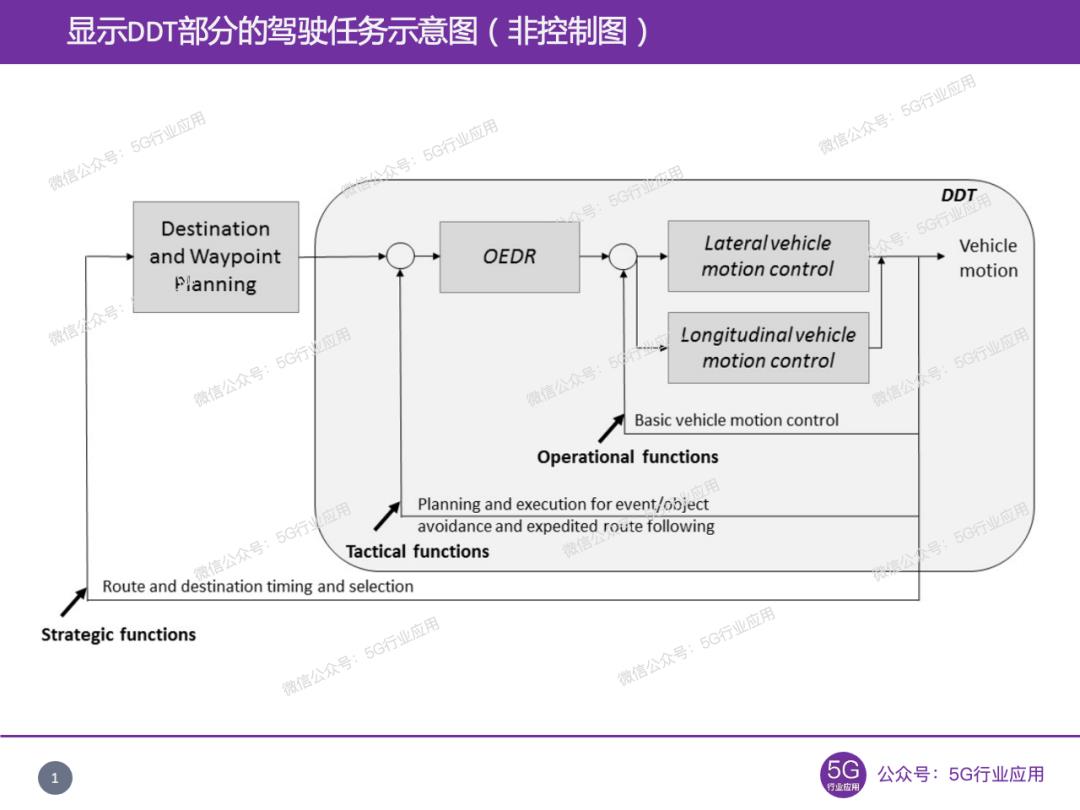
驾驶的整体行为可分为三种类型:战略、策略和操作(Michon,1985)。战略工作涉及行程规划,如决定是否、何时何地、如何行驶、最佳路线等。策略工作涉及在交通行程中操纵车辆,包括决定是否和何时超车或改变车道、选择适当的速度、检查后视镜等。操作工作涉及可被视为预知或先天的瞬间反应,例如对转向、制动和加速进行微小修正,以保持交通中的车道位置,或避免车辆道路的突然障碍或危险事件。
就DDT性能而言,L1级驾驶自动化包括最内部环路部分的自动化(横向车辆运动控制功能或纵向车辆运动控制功能,以及与给定车辆运动控制轴相关的有限OEDR);L2级驾驶自动化包括最内部环路的自动化(车辆横向和纵向运动控制,以及与车辆运动控制相关的有限OEDR);L3至L5级驾驶自动化包括两个内部环路的自动化(车辆横向和纵向运动控制,以及完整OEDR)。注意,DDT性能不包括驾驶的战略方面(例如,确定是否、何时和何地行驶)。[1]
02
动态驾驶任务接管DDT fallback概念
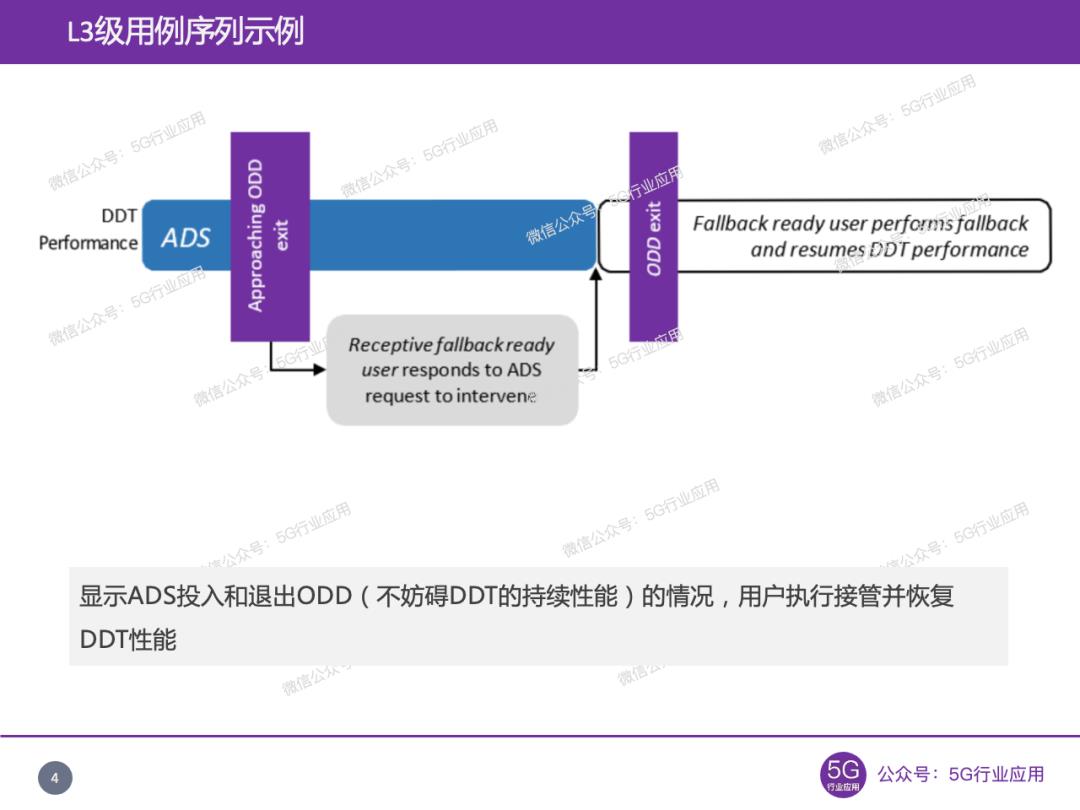
动态驾驶任务接管DDT fallback(Dynamic Driving Task fallback)是在相同情况下,用户对实施DDT或达到最低风险条件的响应(1)在发生DDT性能相关系统故障后,或(2)在ODD退出时,或ADS对达到最低风险条件的响应。
最小风险条件MRC(Minimal Risk Condition)是一种稳定、停止的状态,当给定的行程不能或不应继续时,用户或ADS(Automated Driving System)可在执行DDT接管后驾驶车辆,以降低碰撞风险。
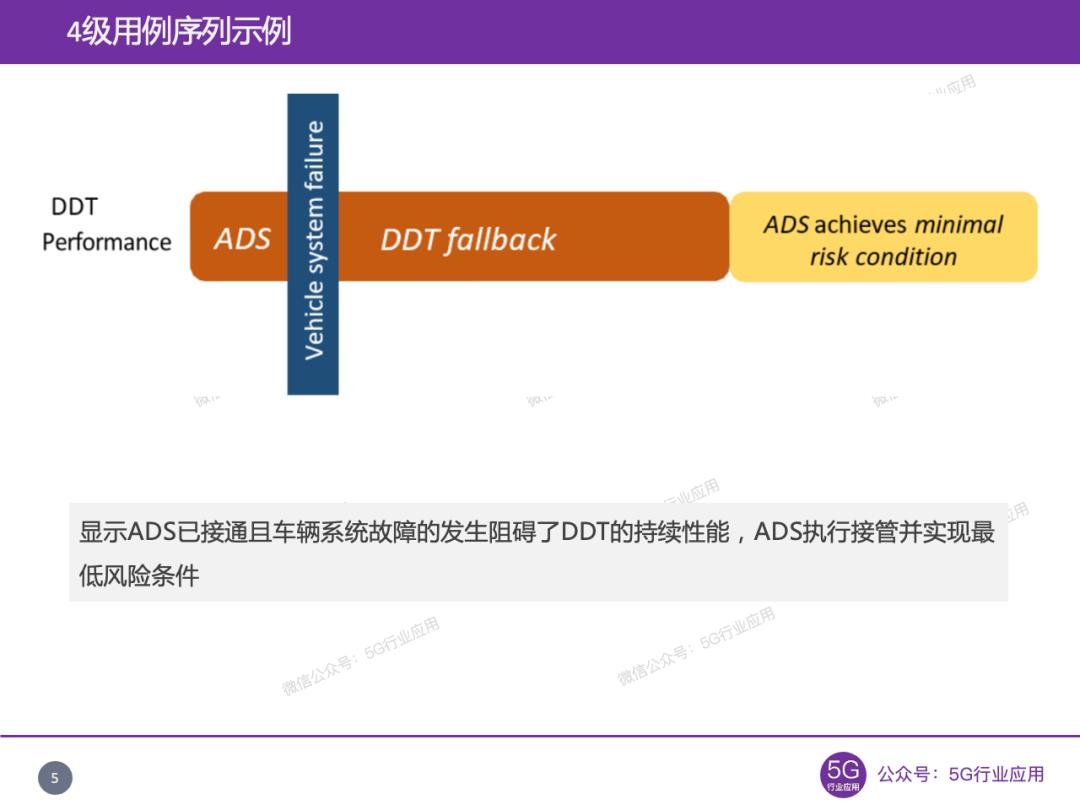

L3级、L4级或L5级ADS的系统故障或超出ODD条件时,区分以下三个单独的功能:(i)DDT性能,(ii)DDT接管性能,以及(iii)实现最小风险条件。
a) DDT性能发生在ADS功能常规/正常操作条件下,也就是说,该功能在正常运行和ODD(如果有的话)范围内执行完整的DDT。
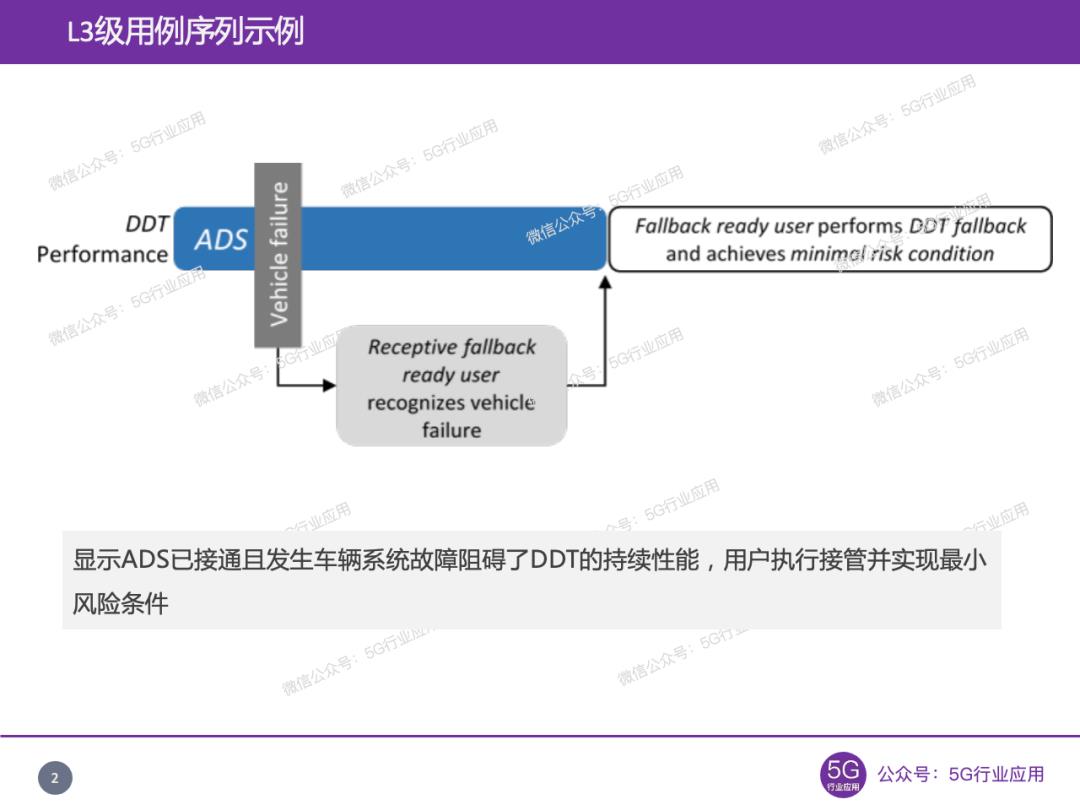
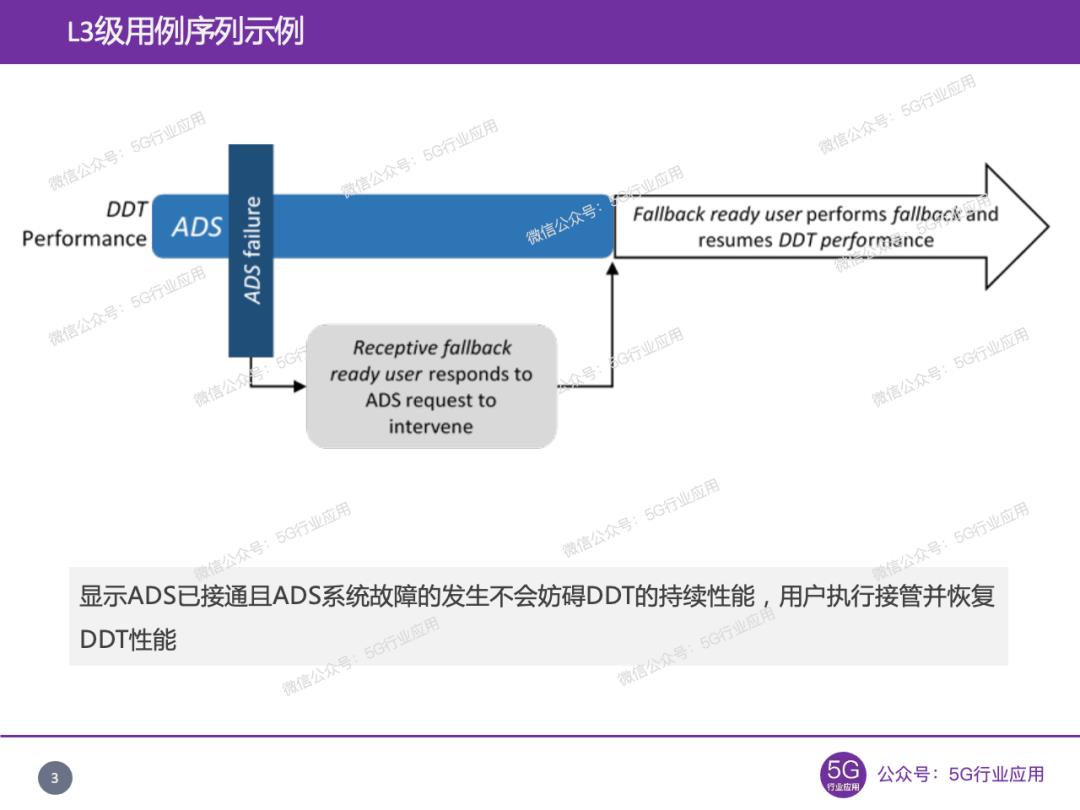
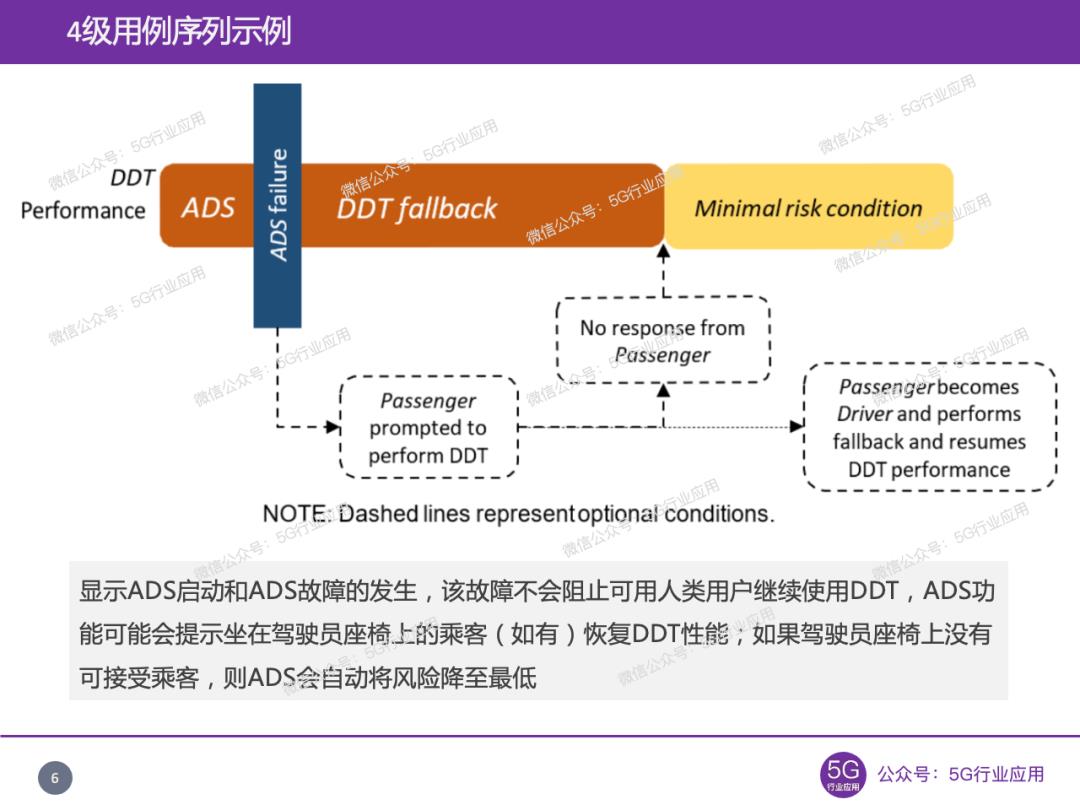
b) 当ADS无法继续执行完整的DDT(即在常规/正常操作下)时,会发生DDT接管。对于L3级ADS功能,人类应急准备用户(车内或远程)将响应干预请求或动觉明显的车辆故障,如果车辆保持可操作,则恢复DDT性能,如果车辆不可操作,则实现最低风险条件。对于L4级或L5级ADS,该功能或系统通过自动达到最低风险条件来执行应急措施,例如,停到路肩上,打开危险指示灯,禁用推进系统,并呼叫路边救援。(注:某些L3级功能可设计为在某些情况下自动执行接管,并实现最低风险条件,如无障碍物的相邻路肩存在时,但在其他情况下,如无此类路肩可用时,则不适用。)当ADS执行接管时,它将车辆操纵到最小风险条件,从而结束接管响应。然而,当接管准备就绪的用户执行接管时,若车辆可操作,他/她可以继续手动操作车辆,而不是达到最低风险条件。
c) L4级和L5级的接管性能和最低风险条件要求ADS在发生DDT性能相关系统故障或超出ODD条件后仍能正常工作。如果ADS不起作用,可采用故障缓解策略。最小风险条件取决于触发接管时的车辆状况及其运行环境,并可能遵循降级模式策略,该策略考虑了与持续运行、驶离道路或原地停车相关的相对风险。[1]
03
目标和事件检测与响应OEDR概念
目标和事件检测与响应OEDR(Object and Event Detection and Response)是DDT的子任务,包括监控驾驶环境(检测,识别和分类对象和事件,并准备按需要做出响应),并对这些对象和事件执行适当的响应(即根据需要完成DDT和/或DDT接管)。[2]
与OEDR特别相关的ADS功能架构元素通常包括支持以下功能的硬件和软件组件。
传感(如毫米波雷达、激光雷达、摄像头等);
感知(例如,道路特征分类、对象分割和分类);
世界建模(例如,持久数据映射、动态障碍跟踪和预测等);
导航和规划(例如,执行响应的路径规划和运动控制命令)。
OEDR行为能力主要包括a) OEDR车辆;b) OEDR交通管制装置和基础设施;c) OEDR弱势交通参与者、物体、动物。
▼表1 OEDR行为能力
OEDR车辆 | •检测并响应入侵、迎面而来的车辆、车辆跟驰 •检测并响应相关停车车辆,包括车道内或路边的车辆 •检测和响应车道变化,包括意外切入 •检测并响应切出,包括意想不到的情况 •检测并响应校车 •检测和响应紧急车辆,包括在十字路口 •检测并响应车辆进入道路 •检测并响应两侧相邻车辆 •在前进和倒车时检测并响应相关车辆 |
OEDR交通管制装置和基础设施 | •遵守驾驶规则 •检测并响应限速变化或建议 •检测并响应相关的通行限制,包括单行道、禁止转弯位置、自行车道、中转车道和人行道(更多完整列表,请参见MUTCD)) •检测并响应相关交通控制设备,包括信号交叉口、停车标志、让行标志、人行横道和车道标记(可能包括褪色标记)(更多完整列表见MUTCD) •检测和响应基础设施要素,包括弯道、道路边缘和护栏(更多完整列表见AASHTO绿皮书) |
OEDR弱势交通参与者、物体、动物 | •检测并响应车道中的相关静态障碍物 •检测和响应车道或路边的行人、骑脚踏车者、动物 |
对象和事件的检测可能以多种方式发生。
a) ADS可能会使用一套感知传感器,其中可能包括毫米波雷达、激光雷达、摄像头和超声波传感器的组合,这些传感器可以支持对这些物体和事件的检测和识别。该路径依赖于支持算法来解析和解释这些传感器提供的数据。
b) V2V和V2I通信能力,通过DSRC/C-V2X或其他技术,也可以在一定容量下支持检测和识别。
c) SAE J2735基本安全信息包括有关车辆位置、速度和航向的信息,这些信息可以补充或增强ADS车载感知传感器的测量。
d) 其他数据,如交叉口信号、相位和计时数据可以通过数字基础设施广播,以提供交通信号状态的信息。
e) 许多正在开发的ADS依赖于事先收集和优化的车载高精度数字地图。这些地图可能包含有关静态对象和基础设施(包括道路本身)的三维信息。地图还可能包括重要的导航元数据,例如路段上的车道数和其他重要的车道特征(例如方向性、左转、仅限公共汽车)、速度限制以及交通控制装置或标记(例如停车标志、交通信号、人行横道)。类似地,该地图信息可用于补充或增加ADS的车载传感器数据(反之亦然),或可单独用于支持特定对象和事件的检测。
假设ADS已正确检测到安全关键对象或事件,则它将执行适当的响应。理想情况下,响应应为稳定的控制动作或机动,使ADS能够与附近的所有相关障碍物保持安全的避让距离,并尽可能继续遵守适用的道路规则和礼仪。符合这些标准的已确定响应包括:
a) 跟车-实施横向和/或纵向控制措施,以保持与直接领先车辆的安全跟车距离,同时继续沿着当前行驶车道行驶;
b) 加速-在适当和合法的情况下,实施纵向控制措施以提高速度;
c) 减速-实施纵向控制措施以降低速度(视情况而定);
d) 停止-执行纵向控制动作,以安全稳定的方式减速至完全停止;
e) 让路-将通行权让给其他道路使用者;
f) 改变车道–实施纵向和/或横向控制措施,以转入相邻车道;
——中止换道–取消切换到相邻车道的操作(保持或返回原始车道);
g) 超车–实施纵向和/或横向控制措施,以驶入相邻车道,加速至所需速度;
——中止通行–取消机动以切换到相邻车道(保持或返回原始车道);
h) 转弯-实施横向和纵向控制措施,从当前道路/车道过渡到连接道路/车道;
i) 在车道内移动–实施横向和/或纵向控制措施,使ADS不跟随当前车道的中心(或接近中心),但完全保持在当前车道内;
j) 驶出车道-实施横向和/或纵向控制措施,使ADS部分或完全驶出当前行驶车道(即一个或多个车轮穿过车道边界);
k) 驶出行车道/停车–实施横向和纵向控制措施,使ADS完全退出当前活动行车道,进入路肩或停车车道并停车;
l) 向MRC过渡:
——向后备准备用户返回控制–向人类乘员/驾驶员返回纵向和横向控制(同时提供足够的警告);
——ADS实施最小风险机动-实施横向和/或纵向控制行动,以实现最小风险条件。
END
▎参考文献
[1] SAE J3016. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. 2021,4.
[2] NHTSA. A Framework for Automated Driving System Testable Cases and Scenarios. 2018,9.
▎推荐阅读
标准解读系列之一:行标发布,道路交通信号控制机从管控到服务
标准解读系列之二:国家车联网产业标准体系完成各板块拼图(附标准下载)
标准解读系列之三:智慧高速建设需要什么样的技术架构?
标准解读系列之四:智慧道路的分级标准是什么?
标准解读系列之五:一文读懂什么是协同自动驾驶?
标准解读系列之六:车联网网络安全标准进展
政策解读系列之一:混行试点、准入管理、无人配送,自动驾驶政策持续突破
政策解读系列之二:智能网联在规范管理中求发展
自动驾驶系列之一:一文详解自动驾驶的运行设计域(ODD)
▎好书推荐

吴冬升 主编
书籍简介:本书系统剖析5G车联网整体架构、体系标准、关键技术、典型业务及应用场景等,对全球及国内车联网最新进展做了全面的扫描和分析,并对5G车联网产业发展面临的挑战和未来发展前景进行展望和预测,对于致力于5G及车联网产业研究、标准化及相关产品实现的广大从业者具有参考价值。

关于我们
「5G行业应用」是聚集TMT行业资深专家的研究咨询平台,致力于在5G时代为企业和个人提供客观、深入和极具商业价值的市场研究和咨询服务,帮助企业利用5G实现战略转型和业务重构。本公众号专注提供5G行业最新动态及深度分析,覆盖通信、媒体、金融、汽车、交通、工业等领域。

以上是关于一文了解自动驾驶世界格局的主要内容,如果未能解决你的问题,请参考以下文章