单片机驱动多个LED
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了单片机驱动多个LED相关的知识,希望对你有一定的参考价值。
我有一块STC 89C54RD+单片机,
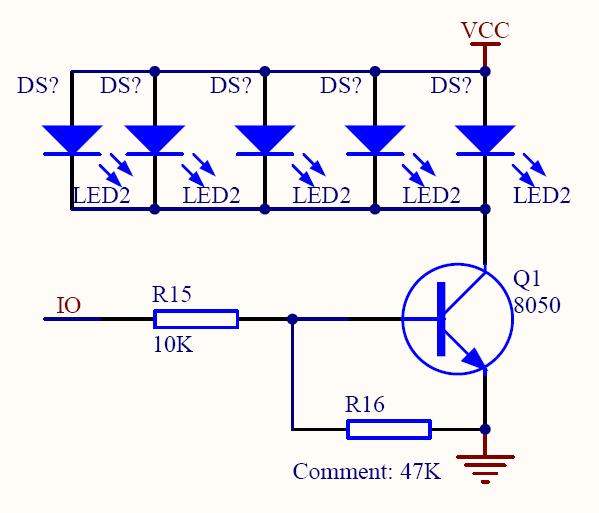
想通过一个I/O口,和一只8050的三极管驱动 12支并联的5mm的发光二极管,请问该如何设置电路??
如图电路图,二极管只画出5个。
1、8050三极管不比达林顿管和mos管放大倍数较小,最小的可能只有40倍,以40倍计算,假设你的每个灯的电流为5mA(看你的应用了,如果用来照明不只5mA),12个灯就60mA,那么你基级需要提供的电流就是1.25mA,因为89C54系列单片机IO不带强推输出,电流有限,所以必须接上拉电阻,否则你的灯因为电流不足亮度很暗。
2、led必须加限流电阻,考虑到led的离散性,在电流一样的情况下,即便同种led两端的电压可能会有差异。而led这种元件在电压变化很小的情况下,电流变化很大。如果你直接并联,各个二极管两端的电压一样,很有可能某些led电流会比其它的led大,甚至某个led因电流过大而烧毁。
3、电路图中R1,根据你的电流选择,但是不要太小,R7可以用跳线直接连过去。

电路图给你啦,IO口随便接,怕图太大你看不清,二极管只画了5只,原理一样。
51单片机 16*64LED单红点阵屏驱动测试

public.h
#ifndef __PUBLIC_H__
#define __PUBLIC_H__
#include "STC12C5A60S2.h"
#include <intrins.h>
#include <string.h>//包含memset函数
#define UCHAR unsigned char
#define UINT unsigned int
#define TRUE 1
#define FALSE 0
#define LEDON 0xFF
#define LEDOFF ~LEDON
/* define constants */
#define FOSC 11059200L
#define MODE1T //Timer clock mode, comment this line is 12T mode, uncomment is 1T mode
#ifdef MODE1T
#define T1MS (65536-FOSC/1000) //1ms timer calculation method in 1T mode
#else
#define T1MS (65536-FOSC/12/1000) //1ms timer calculation method in 12T mode
#endif
//串口1接收缓冲区字节数目
#define RxdComBuffByteNums 1024
//--------------------------------------------------
//接线备注:驱动板的电源和F3.75单元半板电源必须为同一个电源或两个电源共GND,方可正常通信。
//可以调节室内F3.75 64*16单红半板(30.2cm*7.6cm)水平串联数量
#define LedUnitNums 1
//可以调节LED汉字左移速度(LeftMoveSpeed数值越小移动越快)(也可配合下面的中断次数,IntNum数值越小移动越快)
#define LeftMoveSpeed 16
//可以调节上一次显示完与下一次开始显示的间隔汉子个数
#define DisBankNums 4
//LED扫描行数目
#define LedUnitScanRows 16
//单元板可以显示汉字数目
#define DisHZNums (4*LedUnitNums)
//显示缓冲区字节数目
#define DisBufByteNums (32*DisHZNums)
//----------
sbit LA=P2^7;//位码端LA(74HC138最低位A)
sbit LB=P2^6;//位码端LB(74HC138中间位B)
sbit LC=P2^5;//位码端LC(74HC138中间位C)
sbit LD=P2^3;//位码端LD(74HC138最高位D)
sbit LAT=P3^7;//锁存端LAT
sbit CLK=P3^6;//时钟端CLK
sbit OE=P2^4;//使能端OE(低电平有效)
sbit R1=P2^2;//段码端R1(单红半板,串转并数据端)
//串口1接收缓冲区接收上位机发来的LED点阵段码
extern xdata UCHAR S1RxdComBuff[RxdComBuffByteNums];
extern UINT S1SerialIndex;//串口1接收索引号
extern UCHAR S1ParseFlag;//串口1解析标志
extern UINT ReceCount;//接收数据数量
extern UINT crc;//CRC16校验值
extern UCHAR crcLo;//CRC16校验低8位值
extern UCHAR crcHi;//CRC16校验高8位值
//返回成功信息
extern UCHAR actSuccess[];
//返回失败信息
extern UCHAR actFail[];
//LED位码
extern code UCHAR LedPosition[LedUnitScanRows];
//LED3.75单红半板公共数据显示缓冲区
extern idata UCHAR LedDisplayBuf[DisBufByteNums];
/*-----------------------------------------------------
延时函数
------------------------------------------------------*/
void delay(UINT times);
/*-----------------------------------------------------
清空显示缓冲区
------------------------------------------------------*/
void ClearBuffer(UCHAR dat);
/*-----------------------------------------------------
LED初始化函数
------------------------------------------------------*/
void LedInit();
/*--------------------------------------------------
两片74HC138级联的驱动函数,
dat为行驱动的行号数据
---------------------------------------------------*/
void Driver74HC138(UCHAR dat);
/*------------------------------------------------
恒流驱动,16位移位锁存芯片的发送段码字节程序
带有方向参数,可以选择从高位节写入或者低位写入,
direction=0时,从高位写入;direction=1,从低位写入
------------------------------------------------*/
void SendSegmentByte(UCHAR dat,bit direction);
/*--------------------------------------------------
恒流驱动,16位移位锁存芯片的锁存并输出数据
---------------------------------------------------*/
void OutputData();
/*--------------------------------------------------
LED 64*16单红单元半板显示缓冲区数据函数
---------------------------------------------------*/
void LedDisBuf(void);
/*--------------------------------------------------
LED 64*16单红单元半板显示汉字或数字函数
---------------------------------------------------*/
void LedDisplay(void);
/*--------------------------------------------------
LED 64*16单红单元半板上传静态显示汉字函数
x-起始位置,从0开始,(注意:x+num<=DisHZNums)
num-汉字个数;
pDotCode-汉字点阵数组
---------------------------------------------------*/
void LedUploadStaticDisHZ(UCHAR x,UCHAR num,const UCHAR* pDotCode);
//串口延时
extern void ComDelay(UINT dlms);
//清空串口1接收缓冲区
void ClearRxdComBuffer(UCHAR dat);
//串口1初始化
extern void UART_one_init();
//串口1发送数据函数
extern void UART_one_send(UCHAR senddata);
//串口1发送字符串数据函数
extern void S1Print(UCHAR *buffer);
/*=====================================================
功能:CRC16冗余循环校验
参数:unsigned char *puchMsg ; //要进行CRC校验的消息
unsigned short usDataLen ; //消息中字节数
=====================================================*/
extern unsigned int CRC16(unsigned char *puchMsg, unsigned int usDataLen);
#endif
F3.75Driver_51.c
#include "public.h"
//LED位码
code UCHAR LedPosition[LedUnitScanRows]={0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15};
//LED3.75单红半板公共数据显示缓冲区
idata UCHAR LedDisplayBuf[DisBufByteNums];
/*-----------------------------------------------------
延时函数
------------------------------------------------------*/
void delay(UINT times)
{
UINT i,j;
for(i=0;i<times;i++)
for(j=0;j<10;j++);
}
/*-----------------------------------------------------
清空显示缓冲区
------------------------------------------------------*/
void ClearBuffer(UCHAR dat)
{
memset(LedDisplayBuf,dat,DisBufByteNums);//初始化缓冲区
}
/*-----------------------------------------------------
LED初始化函数
------------------------------------------------------*/
void LedInit()
{
//设置P27、P26、P25、P24、P23为强推挽输出,
//P22、P21、P20为准双向口模式(传统8051 I/O模式)
P2M1=0x00;//
P2M0=0xF8;//
//P37、P36、P31、P30,P32、P33、P34、P35为准双向口模式(传统8051 I/O模式)
P3M1=0x00;//
P3M0=0x00;//
P0=0xFF;
P1=0xFF;
P2=0xFF;
P3=0xFF;
OE=0;//使能端有效
LAT=0;//
CLK=0;//
LA=0;//
LB=0;//
LC=0;//
LD=0;//
R1=0;//
//-----------------
ClearBuffer(LEDOFF);//初始化缓冲区
}
/*--------------------------------------------------
两片74HC138级联的驱动函数,
dat为行驱动的行号数据
---------------------------------------------------*/
void Driver74HC138(UCHAR dat)
{
LD=dat/8;//74HC138使能端EN
LC=dat%8/4;
LB=dat%4/2;
LA=dat%2;
}
/*------------------------------------------------
恒流驱动,16位移位锁存芯片的发送段码字节程序
带有方向参数,可以选择从高位节写入或者低位写入,
direction=0时,从高位写入;direction=1,从低位写入
------------------------------------------------*/
void SendSegmentByte(UCHAR dat,bit direction)
{
UCHAR i,temp;
if(direction==0)
temp=0x80;
else
temp=0x01;
for(i=0;i<8;i++)
{
CLK=0;
R1=dat&temp;
if(direction==0)
dat<<=1;
else
dat>>=1;
CLK=1;
}
}
/*--------------------------------------------------
恒流驱动,16位移位锁存芯片的锁存并输出数据
---------------------------------------------------*/
void OutputData()
{
//锁存
LAT=1;
_nop_();
LAT=0;
}
/*--------------------------------------------------
LED 64*16单红单元半板显示缓冲区数据函数
---------------------------------------------------*/
void LedDisBuf(void)
{
UCHAR row,num,j;
for(row=0;row<LedUnitScanRows;row++)//1/16扫描LED屏
{
for(num=0;num<DisHZNums;num++)//发送一行DisHZNums个汉字数据
{
SendSegmentByte(LedDisplayBuf[32*num+row],0);//发送一个汉字左半边数据
SendSegmentByte(LedDisplayBuf[32*num+row+16],0);//发送一个汉字右半边数据
}
Driver74HC138(LedPosition[row]);//发送位码
OutputData();//锁存并输出数据
//delay(1);//延时
//------LED消隐------
for(j=0;j<DisHZNums*2;j++)
SendSegmentByte(0x00,0);//发送8字节段码
OutputData();//锁存并输出数据
delay(1);//延时
}
}
/*--------------------------------------------------
LED 64*16单红单元半板显示汉字或数字函数
---------------------------------------------------*/
void LedDisplay(void)
{
UCHAR times;
for(times=0;times<LeftMoveSpeed;times++)
LedDisBuf();//LED显示缓冲区中数据
}
/*--------------------------------------------------
LED 64*16单红单元半板上传静态显示汉字函数
x-起始位置,从0开始,(注意:x+num<=DisHZNums)
num-汉字个数;
pDotCode-汉字点阵数组
---------------------------------------------------*/
void LedUploadStaticDisHZ(UCHAR x,UCHAR num,const UCHAR* pDotCode)
{
UCHAR i;
if(x+num<=DisHZNums)//显示汉字数目在屏能显示范围内时
{
for(i=0;i<num*32;i++)
LedDisplayBuf[x*32+i]=pDotCode[i];//把点阵数据写入指定的缓冲区
}
else//不在范围内时
{
for(i=0;i<(DisHZNums-x)*32;i++)
LedDisplayBuf[x*32+i]=pDotCode[i];//把点阵数据写入指定的缓冲区
}
}
Comdef.c
//------------------------------------------------------
//程序功能:串口
//------------------------------------------------------
#include "public.h"
/* define variables */
UINT count=0; //times counter
xdata UCHAR S1RxdComBuff[RxdComBuffByteNums]={0};//串口1接收缓冲区
UINT S1SerialIndex=0;//串口1接收索引号
UCHAR S1ParseFlag=0;//串口1解析标志
UCHAR slaveAddr=0x01;//从机地址
UCHAR ucControlCode=0x06;//控制码-下载数据
UINT ReceCount=0;//接收数据数量
UINT crc=0;//CRC16校验值
UCHAR crcLo=0;//CRC16校验低8位值
UCHAR crcHi=0;//CRC16校验高8位值
//返回成功信息
UCHAR actSuccess[]={0x01,0x06,0xAA,0xDF,0xA3};
//返回失败信息
UCHAR actFail[]={0x01,0x06,0x55,0x9F,0xE3};
//串口延时
void ComDelay(UINT dlms)
{
while(dlms--);
}
//清空串口1接收缓冲区
void ClearRxdComBuffer(UCHAR dat)
{
memset(S1RxdComBuff,dat,RxdComBuffByteNums);//初始化缓冲区
}
//串口1初始化
void UART_one_init()
{
//9600bps@11.0592MHz
PCON &= 0x7F; //波特率不倍速
SCON = 0x50; //串口工作方式1,8位数据,可变波特率,允许接收
AUXR |= 0x40; //定时器1时钟为Fosc,即1T
AUXR &= 0xFE; //串口1选择定时器1为波特率发生器
TMOD &= 0x0F; //清除定时器1模式位
TMOD |= 0x20; //设定定时器1为8位自动重装方式
TL1 = 0xDC; //设定定时初值
TH1 = 0xDC; //设定定时器重装值
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
//用定时器T0判断Modbus一帧数据结束间隔3.5个字符,大概5ms
#ifdef MODE1T
AUXR |= 0x80; //timer0 work in 1T mode
#endif
TMOD |= 0x01; //set timer0 as mode1 (16-bit)
TL0 = T1MS; //initial timer0 low byte
TH0 = T1MS >> 8; //initial timer0 high byte
TR0 = 0; //timer0 stop
ET0 = 1; //enable timer0 interrupt
count = 0; //initial counter
ES=1;//打开串口中断
EA=1;//开总中断
PS=1;//串口1中断高优先级
//清空串口1缓冲区
ClearRxdComBuffer(LEDOFF);
}
//串口1中断
void UART_one_interrupt() interrupt 4
{
EA = 0;
if(RI){
RI = 0;
TR0 = 1; //timer0 start running
count = 0; //initial counter
S1RxdComBuff[S1SerialIndex++]=SBUF;//接收数据
}
if(TI){
TI = 0;
}
EA = 1;
}
//串口1发送数据函数
void UART_one_send(UCHAR senddata)
{
ES = 0;
SBUF = senddata;
while(!TI);
TI = 0;
ES = 1;
}
//串口1发送字符串数据函数
void S1Print(UCHAR *buffer)
{
while(*buffer!='\\0'){
UART_one_send(*buffer);
buffer++;
}
}
/* Timer0 interrupt routine */
void timer0_isr() interrupt 1
{
TL0 = T1MS; //reload timer0 low byte
TH0 = T1MS >> 8; //reload timer0 high byte
count++;
if (count>=5) //1ms * 5 -> 5ms
{
TR0 = 0;//关闭定时器T0
count = 0;//复位计数值
S1ParseFlag=1;//串口解析置1
}
}
/* CRC 高位字节值表 */
code unsigned char auchCRCHi[] = {
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 以上是关于单片机驱动多个LED的主要内容,如果未能解决你的问题,请参考以下文章