什么是setup time和hold time
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了什么是setup time和hold time相关的知识,希望对你有一定的参考价值。
一、“setup time”的意思是: 准备时间;建立时间;设置时间
1、读音:英[ˈsɛtʌp taɪm]、美[ˈsɛˌtʌp taɪm]
2、相关短语:
setup p time 战斗展开时间 ; 建立时间
Ideal Setup Start Time 理想整置开始时间
Setup Lead Time 生产准备时间
3、例句:My experience is that the scripting approach can cut the setup time from a day to an hour.
我的经验是,这种编写脚本的方法可以将安装时间从一天缩短到一个小时。
二、“hold time”的意思是:保存时间;维持时间
1、读音:英[həʊld taɪm]、美[hoʊld taɪm]
2、相关短语:
Hold up time 时间 ; 关机时间 ; 维持时间 ; 保压时间
stage hold up time 级滞留时间
Annually Hold A Time 每年举办一次
3、例句:Keep the server hold time to a minimum and client poll time to a maximum, if at all possible.
如果可能,请将服务器保持时间设置为最小,而将客户端轮询时间设置为最大。

扩展资料:
“setup time”的近义词:setting time
1、读音:英[ˈsetɪŋ taɪm]、美[ˈsetɪŋ taɪm]
2、表达意思: 凝固时间;建立时间;置位时间
3、相关短语:
setting up time 接线时间 ; 安装时间 ; 翻译
setting g time 硬化时间 ; 凝结时间
setting-time 凝结时间
4、例句:A new time domain model is established for signal generating by D/A converter in view of the influence of its setting time.
考虑D A转换器建立时间的影响,建立了D A转换器输出信号波形的新的时域模型。
参考技术A 什么是Setup 和Holdup时间?Setup/hold time 是测试芯片对输入信号和时钟信号之间的时间要求。建立时间是指触
发器的时钟信号上升沿到来以前,数据稳定不变的时间。输入信号应提前时钟上升沿
(如上升沿有效)T时间到达芯片,这个T就是建立时间-Setup time.
如不满足setup time,这个数据就不能被这一时钟打入触发器,只有在下一个时
钟上升沿,数据才能被打入触发器。
保持时间是指触发器的时钟信号上升沿到来以后,数据稳定不变的时间。
如果holdtime不够,数据同样不能被打入触发器。本回答被提问者采纳
Nav2官方教程➡First-Time Robot Setup Guide⬅搞不定
推荐下载官方包,按着教程做,需要较好的基础,步骤有些地方教程中漏了,直接原版照着做会出错的。
比如:
在Setting Up The URDF中:
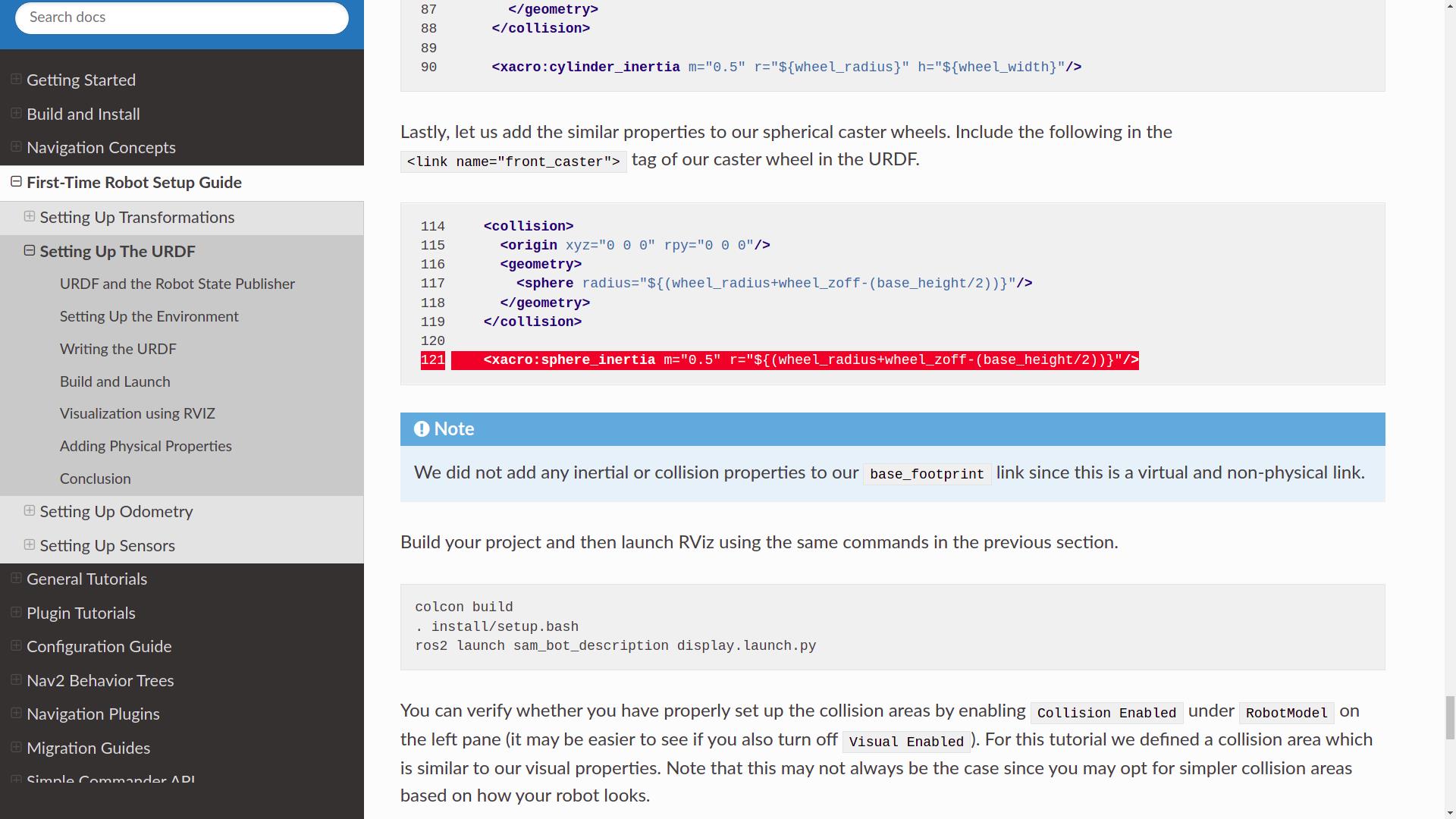
而在Setting Up Odometry中:
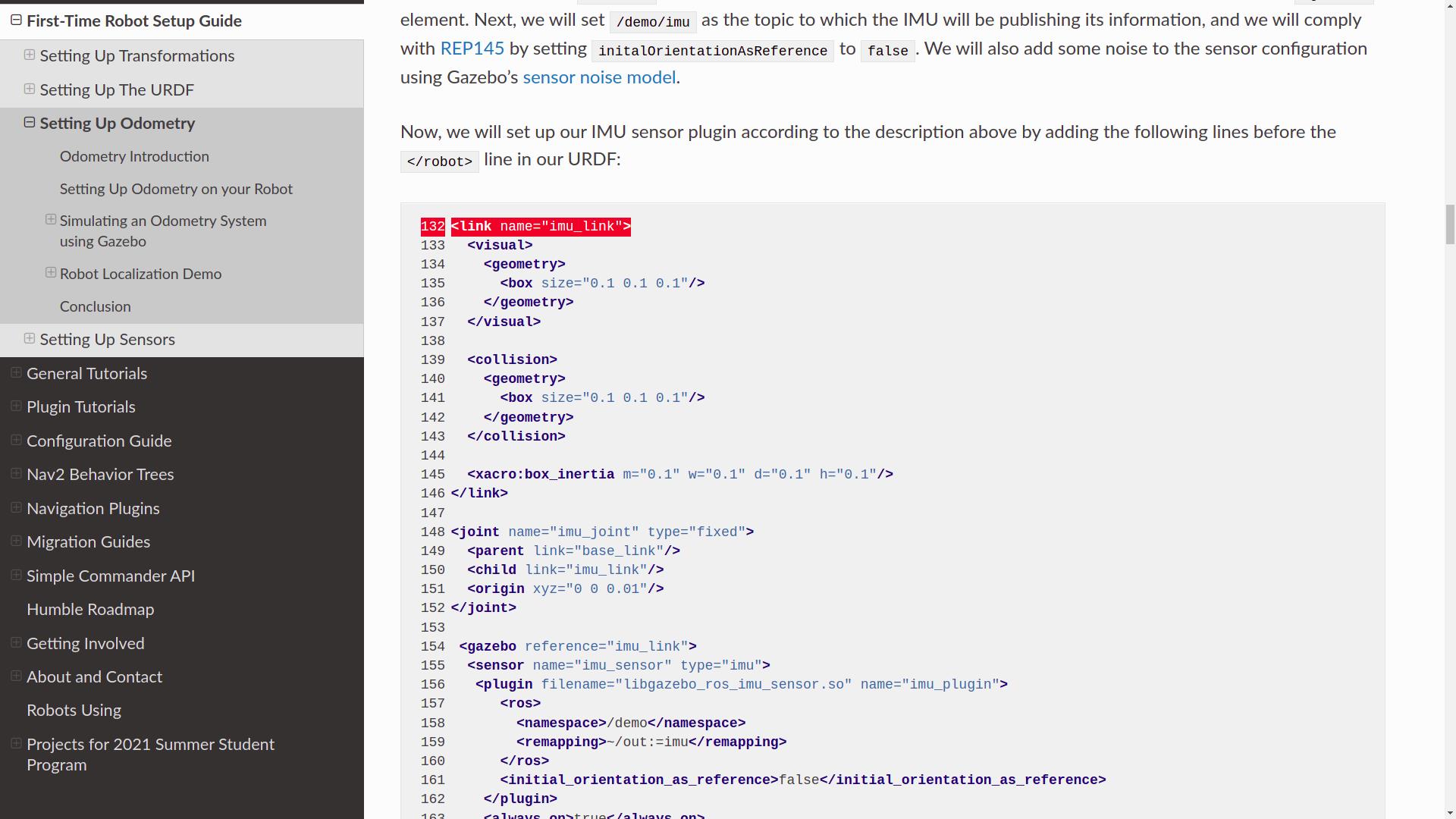
明显有些对不上,少了一些代码,需要看源码补齐,否则,运行会报错,编译不会报错。
TF2这块明显默认阅读文档者已经有比较好的基础了。
如下功能包一定要装:
- sudo apt install ros-<ros2-distro>-joint-state-publisher-gui
- sudo apt install ros-<ros2-distro>-xacro
- sudo apt install ros-<ros2-distro>-gazebo-ros-pkgs
- sudo apt install ros-<ros2-distro>-robot-localization
- sudo apt install ros-<ros2-distro>-slam-toolbox
- sudo apt install ros-<ros2-distro>-navigation2
- sudo apt install ros-<ros2-distro>-nav2-bringup
先装了在按教程步骤走!<ros2-distro>为foxy及以后版本。
 务必严格按官方教程学习,如有问题,一定看官方示例的源代码。
务必严格按官方教程学习,如有问题,一定看官方示例的源代码。
常用命令如下:
colcon build
. install/setup.bash
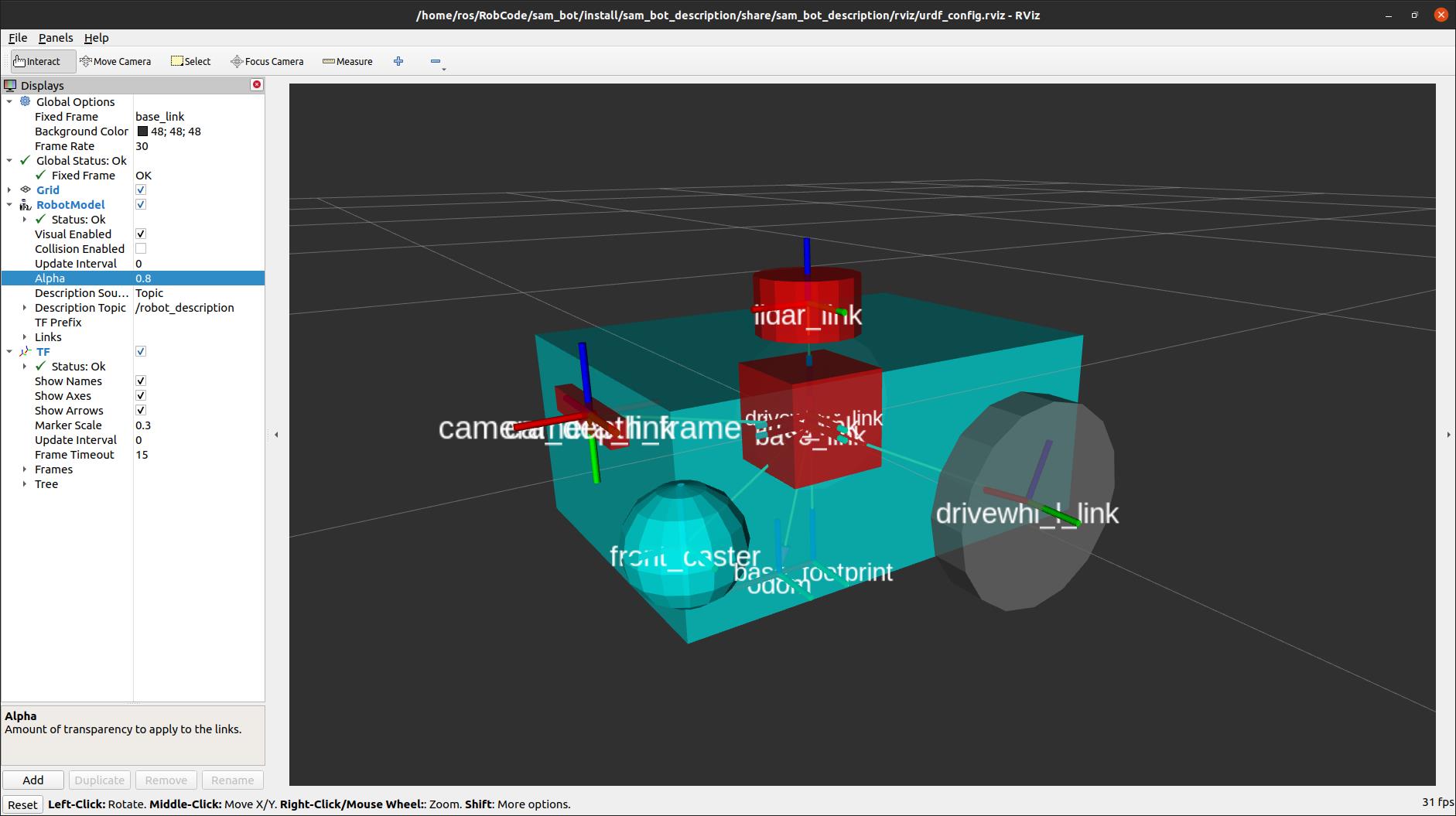
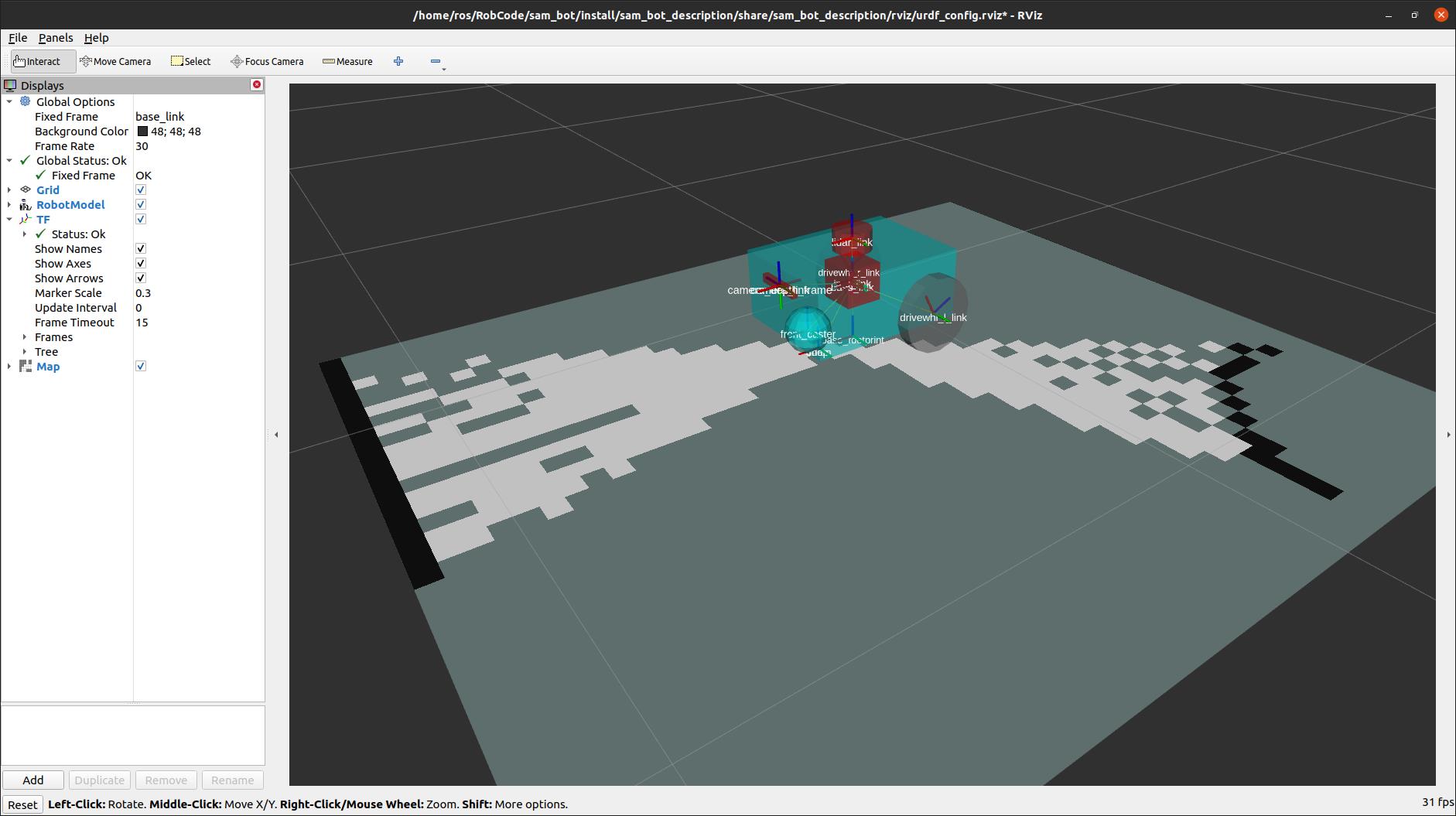
ros2 launch sam_bot_description display.launch.py
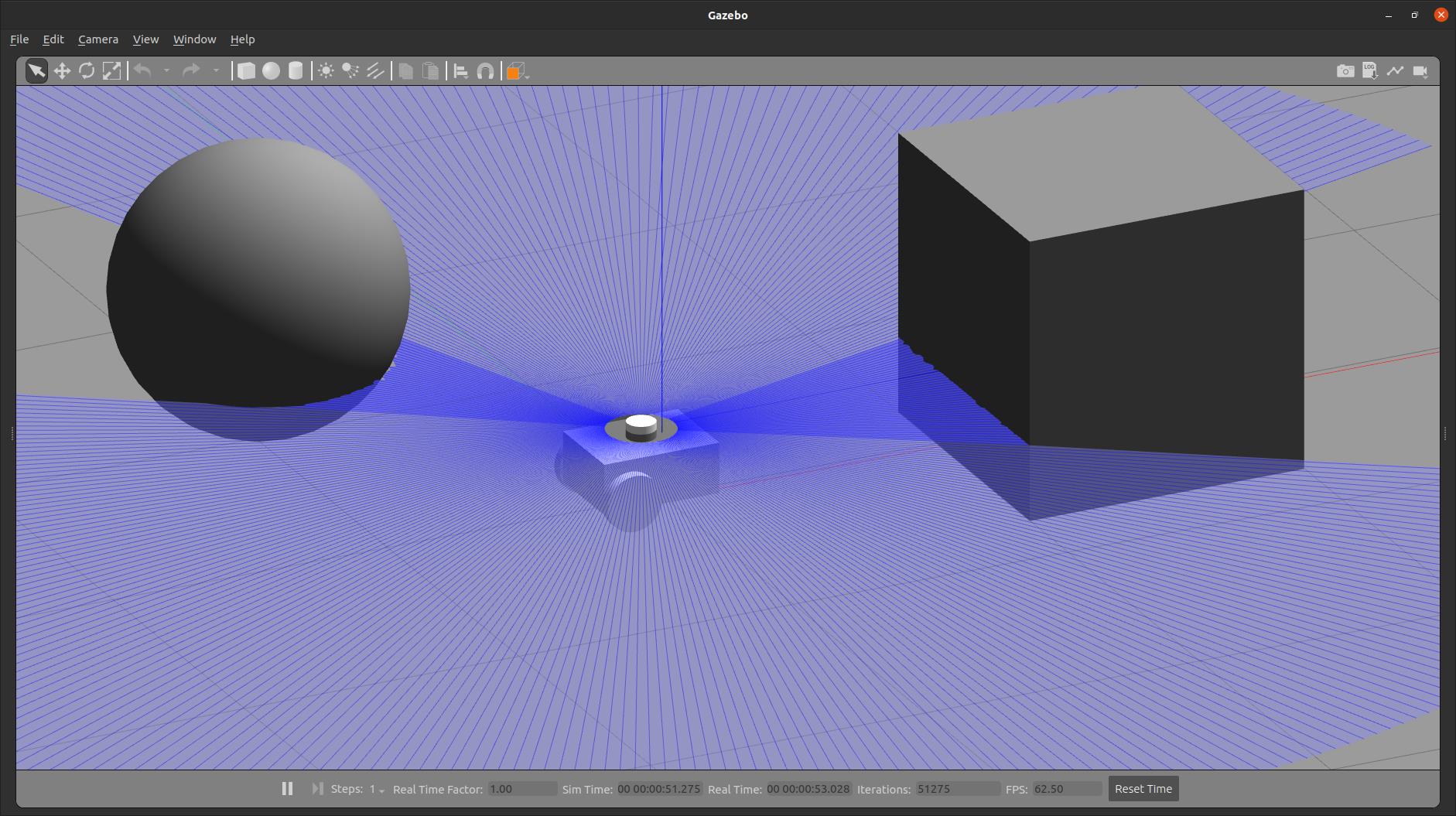
ros2 launch slam_toolbox online_async_launch.py
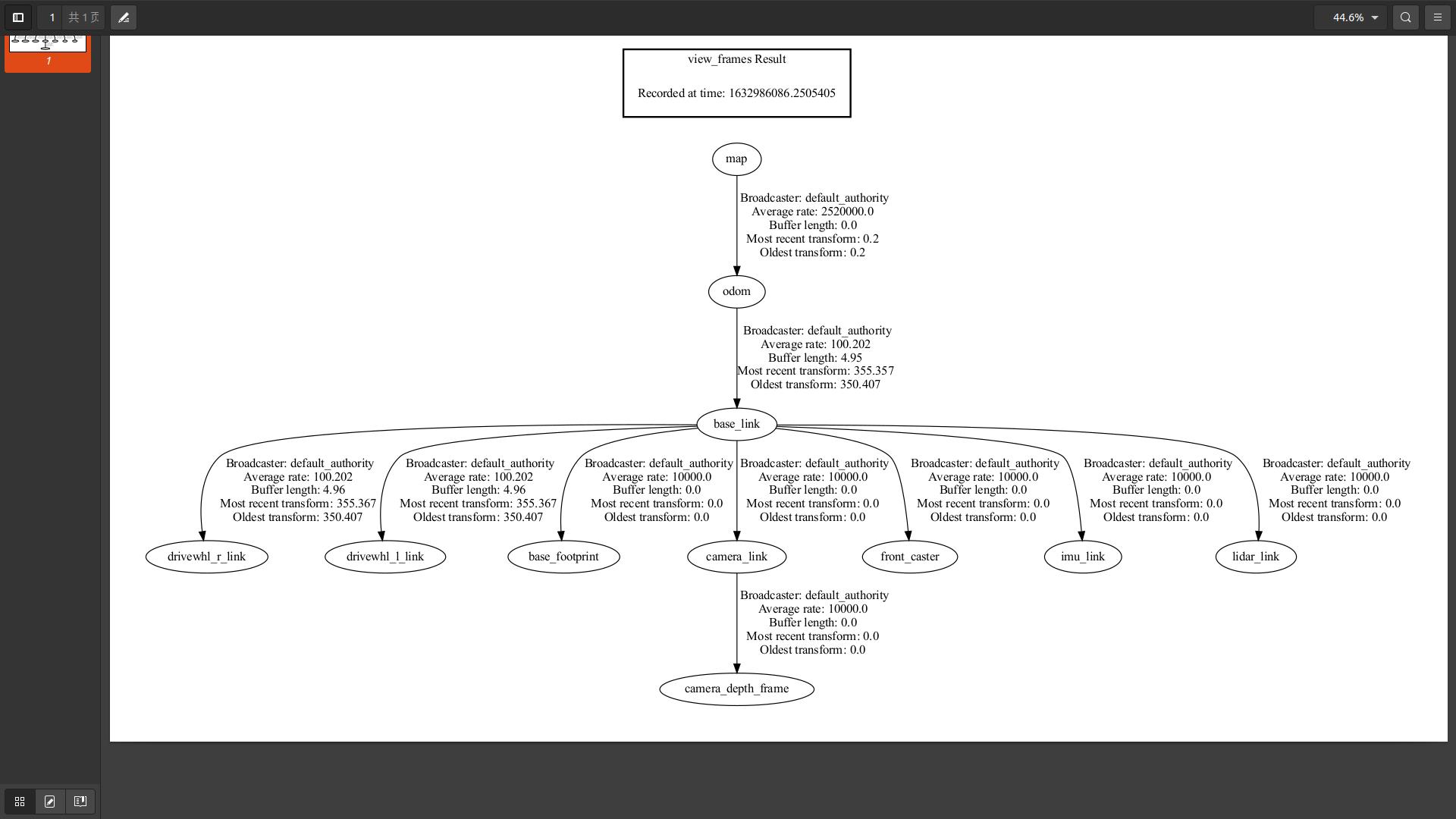
ros2 run tf2_tools view_frames.py
当然报错少不了!

但是如果试图从官网找到答案那一定是奇妙的!

惊喜不惊喜。其实很久之前也是这样的。当然努力一把还是可以调试成功的。
后续再更新吧。
以上是关于什么是setup time和hold time的主要内容,如果未能解决你的问题,请参考以下文章