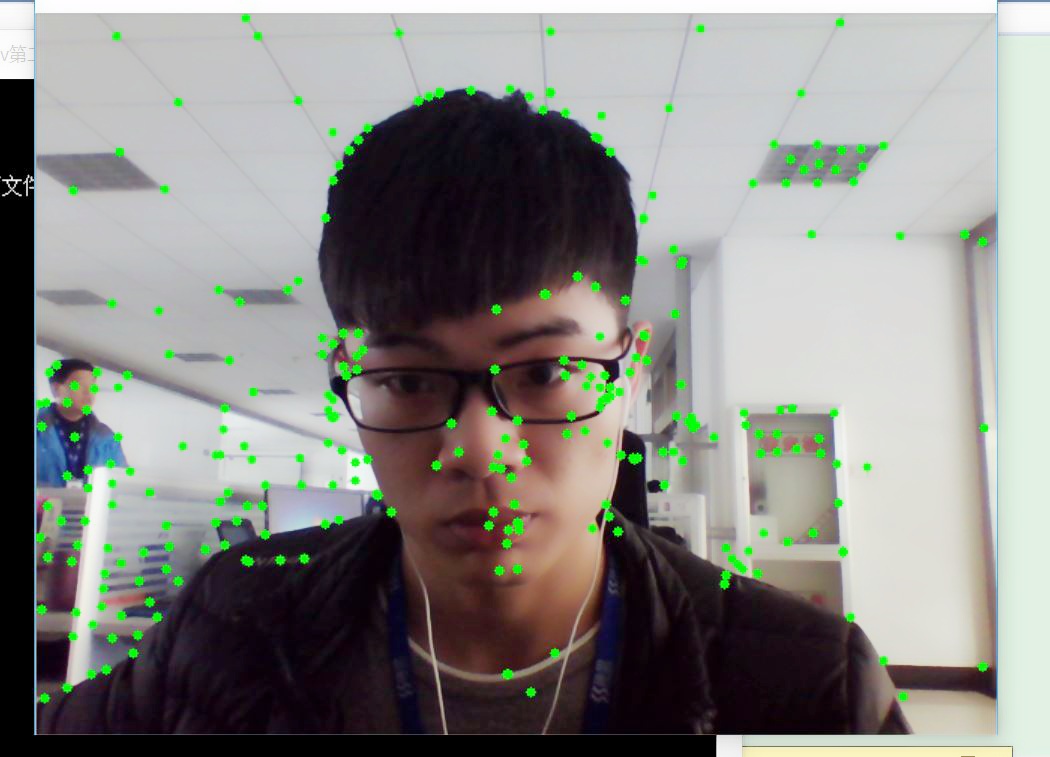
题目:Opencv中的点追踪技术
Posted 岩枭
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了题目:Opencv中的点追踪技术相关的知识,希望对你有一定的参考价值。
题目:Opencv中的点追踪技术
代码实现:
#include "opencv2/video/tracking.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <opencv2/core/core.hpp>
#include <iostream>
#include <ctype.h>
using namespace cv;
using namespace std;
static void help()
cout << "\\n\\n\\t该Demo演示了 Lukas-Kanade基于光流的lkdemo\\n";
cout << "\\n\\t程序默认从摄像头读入视频,可以按需改为从视频文件读入图像\\n";
cout << "\\n\\t操作说明: \\n"
"\\t\\t通过点击在图像中添加/删除特征点\\n"
"\\t\\tESC - 退出程序\\n"
"\\t\\tr -自动进行追踪\\n"
"\\t\\tc - 删除所有点\\n"
"\\t\\tn - 开/光-夜晚模式\\n" << endl;
Point2f point;
bool addRemovePt = false;
//--------------------------------【onMouse( )回调函数】------------------------------------
// 描述:鼠标操作回调
//-------------------------------------------------------------------------------------------------
static void onMouse(int event, int x, int y, int /*flags*/, void* /*param*/)
if (event == EVENT_LBUTTONDOWN)
point = Point2f((float)x, (float)y);
addRemovePt = true;
int main(int argc, char** argv)
help();
VideoCapture cap;
TermCriteria termcrit(TermCriteria::MAX_ITER | TermCriteria::EPS, 20, 0.03);
Size subPixWinSize(10, 10), winSize(31, 31);
const int MAX_COUNT = 500;
bool needToInit = false;
bool nightMode = false;
cap.open(0);
if (!cap.isOpened())
cout << "Could not initialize capturing...\\n";
return 0;
namedWindow("LK Demo", 1);
setMouseCallback("LK Demo", onMouse, 0);
Mat gray, prevGray, image;
vector<Point2f> points[2];
for (;;)
Mat frame;
cap >> frame;
if (frame.empty())
break;
frame.copyTo(image);
cvtColor(image, gray, COLOR_BGR2GRAY);
if (nightMode)
image = Scalar::all(0);
if (needToInit)
// 自动初始化
goodFeaturesToTrack(gray, points[1], MAX_COUNT, 0.01, 10, Mat(), 3, 0, 0.04);
cornerSubPix(gray, points[1], subPixWinSize, Size(-1, -1), termcrit);
addRemovePt = false;
else if (!points[0].empty())
vector<uchar> status;
vector<float> err;
if (prevGray.empty())
gray.copyTo(prevGray);
calcOpticalFlowPyrLK(prevGray, gray, points[0], points[1], status, err, winSize,
3, termcrit, 0, 0.001);
size_t i, k;
for (i = k = 0; i < points[1].size(); i++)
if (addRemovePt)
if (norm(point - points[1][i]) <= 5)
addRemovePt = false;
continue;
if (!status[i])
continue;
points[1][k++] = points[1][i];
circle(image, points[1][i], 3, Scalar(0, 255, 0), -1, 8);
points[1].resize(k);
if (addRemovePt && points[1].size() < (size_t)MAX_COUNT)
vector<Point2f> tmp;
tmp.push_back(point);
cornerSubPix(gray, tmp, winSize, Size(-1, -1), termcrit);
points[1].push_back(tmp[0]);
addRemovePt = false;
needToInit = false;
imshow("LK Demo", image);
char c = (char)waitKey(10);
if (c == 27)
break;
switch (c)
case 'r':
needToInit = true;
break;
case 'c':
points[0].clear();
points[1].clear();
break;
case 'n':
nightMode = !nightMode;
break;
std::swap(points[1], points[0]);
cv::swap(prevGray, gray);
return 0;
以上是关于题目:Opencv中的点追踪技术的主要内容,如果未能解决你的问题,请参考以下文章