看看不一样的ConcurrentHashMap
Posted 姓chen的大键哥
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了看看不一样的ConcurrentHashMap相关的知识,希望对你有一定的参考价值。
HashMap是Java中常见的数据结构,它结合了数组和链表的特点,查找和增删改操作均十分高效,但HashMap不适合在多线程环境下使用(非线程安全的集合),在多线程下对HashMap进行操作可能出现各种问题:
- 多线程put的时候可能导致元素丢失
- JDK 1.7 扩容采用的是“头插法”,在高并发下会出现死循环
- HashMap 在并发下存在数据覆盖、遍历的同时进行修改会抛出 ConcurrentModificationException 异常等问题
HashMap虽好,但不适合在多线程环境下使用,那有线程安全的HashMap吗,答案是有的,JDK为我们提供了三种线程安全的HashMap:
- HashTable
- synchronizedMap
- ConcurrentHashMap
synchronizedMap是通过Collections.synchronizedMap()方法得到的,它将所有Map操作通过synchronized块进行修饰,与HashTable类似(HashTable是在所有方法加上synchronized关键字),这两个Map在多线程环境下是线程安全的,但他们的并发性能很差,同一时刻只能有一个线程进行操作,效率太低。
为了解决HashMap线程不安全以及synchronizedMap和HashTable并发效率低下的问题,Doug Lea大师为我们准备了兼具高效和安全的HashMap --> ConcurrentHashMap
本文就来讲讲ConcurrentHashMap是如何做到高效和安全的,由于ConcurrentHashMap在JDK1.7 和JDK1.8的实现不同,本文就分别介绍这两个版本的实现原理
本文阅读指南
JDK1.7的ConcurrentHashMap
内部结构
ConcurrentHashMap内部是由Segments数组结构和HashEntry数组结构组成,Segment是一种可重入锁(继承自ReentrantLock),在ConcurrentHashMap扮演锁的角色;HashEntry则是真正用于存储数据的数据结构。一个ConcurrentHashMap中包含一个Segments数组,一个Segment中包含一个HashEntry数组,HashEntry是一个链表结构,所以Segment是一个散列表的结构(与HashMap类似)。ConcurrentHashMap的结构如图所示:
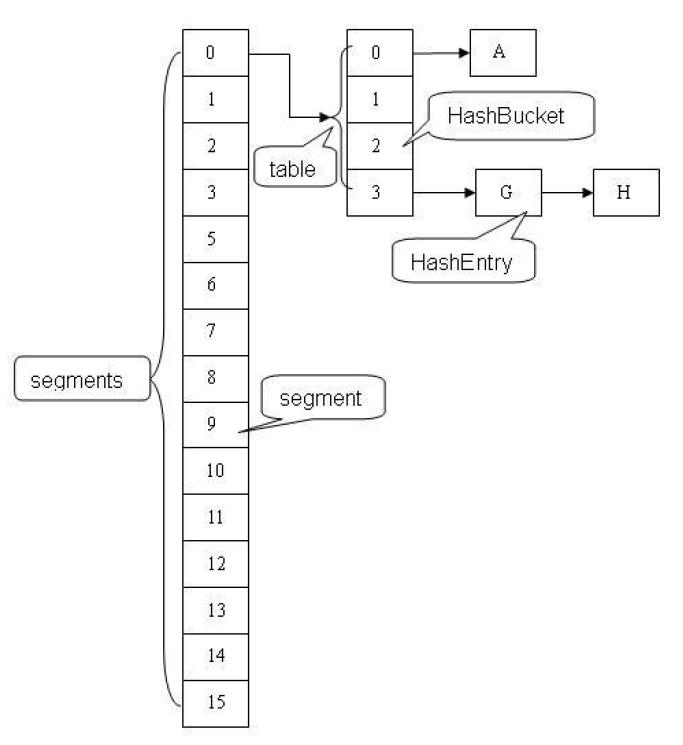
Segments数组实现了分段锁,对ConcurrentHashMap进行访问时需要获取对应Segment的锁,这样多线程在访问容器不同数据段中的数据时就不会互相影响,线程之间锁竞争就会大大减小,从而提高了并发效率,同时也能保证安全访问数据
Segment相关代码如下
/**
* 段是哈希表的专用版本。该子类是ReentrantLock的子类,为了简化一些锁并避免单独构造。
*/
static final class Segment<K,V> extends ReentrantLock implements Serializable
private static final long serialVersionUID = 2249069246763182397L;
/**
* 在可能阻塞获取以准备锁定的段操作之前,尝试在预扫描中尝试锁定的最大次数。
* 在多处理器上,使用有限数量的重试可以维护在定位节点时获取的缓存。
*/
static final int MAX_SCAN_RETRIES =
Runtime.getRuntime().availableProcessors() > 1 ? 64 : 1;
/**
* 每个段。元素是通过entryAtsetEntryAt访问的,提供可变的语义。
*/
transient volatile HashEntry<K,V>[] table;
/**
* 元素数。
* 仅在锁内或其他保持可见性的易失性读取中访问。
*/
transient int count;
/**
* HashEntry的操作总数。即使这可能溢出32位,它也为CHM isEmpty()和size()方法中的稳定性检查提供了足够的准确性。
* 仅在锁内或其他保持可见性的易失性读取中访问。
*/
transient int modCount;
/**
* 当表的大小超过此阈值时,将对其进行扩容并重新哈希处理。
* 此字段的值始终为(int)(capacity * loadFactor)
*/
transient int threshold;
/**
* 哈希表的负载因子。即使所有段的该值都相同,也将复制该值以避免需要链接到外部对象。
*/
final float loadFactor;
Segment(float lf, int threshold, HashEntry<K,V>[] tab)
this.loadFactor = lf;
this.threshold = threshold;
this.table = tab;
HashEntry的相关代码如下:
/**
* ConcurrentHashMap列表条目。它永远不会导出为用户可见的Map.Entry
*/
static final class HashEntry<K,V>
final int hash;
final K key;
volatile V value;
volatile HashEntry<K,V> next;
HashEntry(int hash, K key, V value, HashEntry<K,V> next)
this.hash = hash;
this.key = key;
this.value = value;
this.next = next;
/**
* 使用易失性写语义设置下一个字段。
*/
final void setNext(HashEntry<K,V> n)
UNSAFE.putOrderedObject(this, nextOffset, n);
// Unsafe mechanics
static final sun.misc.Unsafe UNSAFE;
static final long nextOffset;
static
try
UNSAFE = sun.misc.Unsafe.getUnsafe();
Class k = HashEntry.class;
nextOffset = UNSAFE.objectFieldOffset
(k.getDeclaredField("next"));
catch (Exception e)
throw new Error(e);
构造函数
先来看看几个重要的参数:
/**
* 默认初始容量,在没有在构造函数中另外指定时使用
*/
static final int DEFAULT_INITIAL_CAPACITY = 16;
/**
* 默认加载因子,在没有在构造函数中另外指定时使用
*/
static final float DEFAULT_LOAD_FACTOR = 0.75f;
/**
* 默认并发级别,在没有在构造函数中另外指定时使用。
*/
static final int DEFAULT_CONCURRENCY_LEVEL = 16;
/**
* 最大容量,如果两个构造函数都使用参数隐式指定了更高的值,则使用该容量。
* 必须是2的幂且小于等于 1 << 30,以确保条目可以使用int进行索引
*/
static final int MAXIMUM_CAPACITY = 1 << 30;
/**
* 每段表的最小容量。必须为2的幂,至少为2的幂,以免在延迟构造后立即调整下次使用时的大小。
*/
static final int MIN_SEGMENT_TABLE_CAPACITY = 2;
/**
* 允许的最大段数;用于绑定构造函数参数。必须是小于1 << 24的2的幂。
*/
static final int MAX_SEGMENTS = 1 << 16; // slightly conservative
/**
* 在锁定整个表之前,size和containsValue()方法的不同步重试次数。
* 如果表进行连续修改,这将用于避免无限制的重试,这将导致无法获得准确的结果。
*/
static final int RETRIES_BEFORE_LOCK = 2;
/**
* 用于编入段的掩码值。密钥的哈希码的高位用于选择段。
*/
final int segmentMask;
/**
* 段内索引的移位值。
*/
final int segmentShift;
/**
* 段,每个段都是一个专用的哈希表
*/
final Segment<K,V>[] segments;
上面的参数知道大概就行,在接下来的代码中就能理解这些参数的作用的,接下来看看构造方法:
/**
* 使用指定的初始容量,负载因子和并发级别创建一个新的空映射。
*
* @param 初始容量。该实现执行内部大小调整以容纳许多元素。
*
* @param loadFactor 负载系数阈值,用于控制调整大小。
* 当每个仓的平均元素数超过此阈值时,可以执行大小调整。
*
* @param concurrencyLevel 估计的并发更新线程数。该实现执行内部大小调整以尝试容纳这么多线程。
*
* @throws IllegalArgumentException 如果初始容量为负,或者负载因子或concurrencyLevel为非正数。
*/
@SuppressWarnings("unchecked")
public ConcurrentHashMap(int initialCapacity, float loadFactor, int concurrencyLevel)
//对非法输入进行处理
if (!(loadFactor > 0) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
// 若并发线程数大于最大段数,则等于最大段数
if (concurrencyLevel > MAX_SEGMENTS)
concurrencyLevel = MAX_SEGMENTS;
// 为保证能通过位与运算的散列算法来定位segments数组索引,要保证数组长度为2的幂,查找最适合参数的二乘幂
int sshift = 0;
int ssize = 1;
while (ssize < concurrencyLevel)
++sshift;
ssize <<= 1;
this.segmentShift = 32 - sshift;
this.segmentMask = ssize - 1;
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
//初始化每个segment中的HashEntry长度
int c = initialCapacity / ssize;
//如果c大于1,cap会取大于等于c的2次方,所以cap要么等于1要么等于2的幂次方
if (c * ssize < initialCapacity)
++c;
int cap = MIN_SEGMENT_TABLE_CAPACITY;
while (cap < c)
cap <<= 1;
// 创建segments数组,并初始化segments[0]
Segment<K,V> s0 = new Segment<K,V>(loadFactor, (int)(cap * loadFactor),
(HashEntry<K,V>[])new HashEntry[cap]);
Segment<K,V>[] ss = (Segment<K,V>[])new Segment[ssize];
UNSAFE.putOrderedObject(ss, SBASE, s0); // ordered write of segments[0]
this.segments = ss;
public ConcurrentHashMap(int initialCapacity, float loadFactor)
this(initialCapacity, loadFactor, DEFAULT_CONCURRENCY_LEVEL);
public ConcurrentHashMap(int initialCapacity)
this(initialCapacity, DEFAULT_LOAD_FACTOR, DEFAULT_CONCURRENCY_LEVEL);
public ConcurrentHashMap()
this(DEFAULT_INITIAL_CAPACITY, DEFAULT_LOAD_FACTOR, DEFAULT_CONCURRENCY_LEVEL);
public ConcurrentHashMap(Map<? extends K, ? extends V> m)
this(Math.max((int) (m.size() / DEFAULT_LOAD_FACTOR) + 1, DEFAULT_INITIAL_CAPACITY), DEFAULT_LOAD_FACTOR, DEFAULT_CONCURRENCY_LEVEL);
putAll(m);
由上述代码可以看到ConcurrentHashMap的构造方法最终会调用到同一个方法,只要集中看这个方法即可。
ConcurrentHashMap初始化的时候做了以下几个事情:
- 处理非法输入
- 计算segmentShift和segmentMask
- 计算每个Segments中HashEntry的容量cap
- 初始化segments数组同时初始化Segment,并加入到segments[0]的位置上
segments数组的大小ssize是通过concurrencyLevel来计算的,为保证能通过位与运算的散列算法来定位segments数组索引,要保证数组长度为2的幂,需要计算一个大于或等于concurrencyLevel的最小2的N次方值来作为数组的长度。
segmentShift用于定位参与散列运算的位数,segmentShift等于32 - sshift,使用32是因为ConcurrentHashMap的hash() 方法输出值最大是32位的。
segmentMask是散列运算的掩码,segmentMask记录的是ssize - 1的值,ssize是2的幂次方,所以segmentMask每个二进制位都是1.
这两个参数有些难理解,后面讲到get() 方法时就明白这两个参数的含义了。
get()方法
话不多说,先上代码
public V get(Object key)
Segment<K,V> s; // manually integrate access methods to reduce overhead
HashEntry<K,V>[] tab;
//将key的hashcode进行再散列,减少hash冲突
int h = hash(key);
//散列算法,定位元素在segments数组的位置
long u = (((h >>> segmentShift) & segmentMask) << SSHIFT) + SBASE;
//Segment不为空且Segment内部的HashEntry不为空,则继续查找
if ((s = (Segment<K,V>)UNSAFE.getObjectVolatile(segments, u)) != null && (tab = s.table) != null)
//散列算法定位HashEntry,遍历HashEntry,直到找到对应key,没有则退出循环
for (HashEntry<K,V> e = (HashEntry<K,V>) UNSAFE.getObjectVolatile(tab, ((long)(((tab.length - 1) & h)) << TSHIFT) + TBASE);
e != null; e = e.next)
K k;
if ((k = e.key) == key || (e.hash == h && key.equals(k)))
return e.value;
return null;
get() 方法主要做了几件事:
- 通过散列计算获取元素在segments数组的位置
- 获取对应的Segment,若不为空则继续则通过散列算法获取Segment内部的HashEntry数组对应的HashEntry
- 若HashEntry不为空则遍历HashEntry找到key对应的值
get() 操作之所以高效是因为ConcurrentHashMap中的共享变量都被定义成volatile类型,从Segment和HashEntry的成员变量中可以看出,这样做能保证所有线程都能看到最新的值,根据Java内存模型的happen before 原则,对volatile类型的写入操作先于读取操作,即两个线程同时修改和获取volatile变量,get操作也能得到最新值,这样get() 无需加锁,进而提高了并发效率。
get() 方法并发高效的原因知道了,那ConcurrentHashMap是如何定位元素位置的呢?get() 方法中出现了hash() 方法,先看一下hash() 方法
private int hash(Object k)
int h = hashSeed;
if ((0 != h) && (k instanceof String))
return sun.misc.Hashing.stringHash32((String) k);
h ^= k.hashCode();
// 使用单字Wang/Jenkins哈希的变体来扩展位,以规范化段和索引位置。
h += (h << 15) ^ 0xffffcd7d;
h ^= (h >>> 10);
h += (h << 3);
h ^= (h >>> 6);
h += (h << 2) + (h << 14);
return h ^ (h >>> 16);
这个方法官方的解释是应用于hashcode上,使hashcode的高位和低位充分参与散列算法,减少散列冲突。这么做可以使元素均匀分布在不同的Segment中从而提高存取效率。如果散列的质量差到极点,那所有的元素都会位于同一个Segment中,分段锁的意义就没了,而且并发效率会大大降低。
让hashcode充分散列之后就可以使用散列算法定位元素的位置了,定位HashEntry和定位Segment的算法是一样,但有些细微的差别
//定位Segment
(h >>> segmentShift) & segmentMask
//定位HashEntry
(tab.length - 1) & h
上面说过segmentMask记录的是ssize-1的值,即segments长度-1的值,segmentShift是散列值向右偏移的位数,即实际是向右偏移,让散列值的高位参与运算;定位Segment是用再散列的值的高位进行运算,而定位HashEntry则是用再散列的值直接进行运算,这么做的目的是避免两次散列后的值一样,使元素在Segment散列开了,而没有在HashEntry内部散列开,进而增加了冲突的可能。
看完了get() 方法,接下来看看put() 方法,看看大师的手法o( ̄▽ ̄)o
put()方法
废话不多说,还是先看代码
public V put(K key, V value)
Segment<K,V> s;
if (value == null)
throw new NullPointerException();
int hash = hash(key);
int j = (hash >>> segmentShift) & segmentMask;
//易失性,在ensureSegment重新检查
if ((s = (Segment<K,V>)UNSAFE.getObject(segments, (j << SSHIFT) + SBASE)) == null)
s = ensureSegment(j);
return s.put(key, hash, value, false);
private Segment<K,V> ensureSegment(int k)
final Segment<K,V>[] ss = this.segments;
long u = (k << SSHIFT) + SBASE; // raw offset
Segment<K,V> seg;
//Segment不存在,新建一个
if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null)
//使用segments[0]的参数创建新的Segment
Segment<K,V> proto = ss[0]; // use segment 0 as prototype
int cap = proto.table.length;
float lf = proto.loadFactor;
int threshold = (int)(cap * lf);
HashEntry<K,V>[] tab = (HashEntry<K,V>[])new HashEntry[cap];
//二次检查,防止其他线程先创建了Segment,而覆盖其创建的Segment
if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null)
// recheck
Segment<K,V> s = new Segment<K,V>(lf, threshold, tab);
while ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null)
//通过CAS将新建的Segment加到segments数组中
if (UNSAFE.compareAndSwapObject(ss, u, null, seg = s))
break;
return seg;
put() 方法做了几件事:
- 通过散列算法获取key对应的Segment的下标
- 获取该Segment,若Segment不存在则调用ensureSegment() 方法重新确认 (创建Segment在这个方法中,Segment的参数从Segment[0]获取)
- 调用Segment的put() 将元素加入到Segment中
Segment.put()
put() 方法较为简单(其他的可以看看注释),详细的接下来看Segment中put() 方法,这个方法才是核心
/**
* ConcurrentHashMap.Segment
*/
final V put(K key, int hash