遥感测深方法综述机载雷达测深系统关键参数
Posted xiaokcehui
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了遥感测深方法综述机载雷达测深系统关键参数相关的知识,希望对你有一定的参考价值。
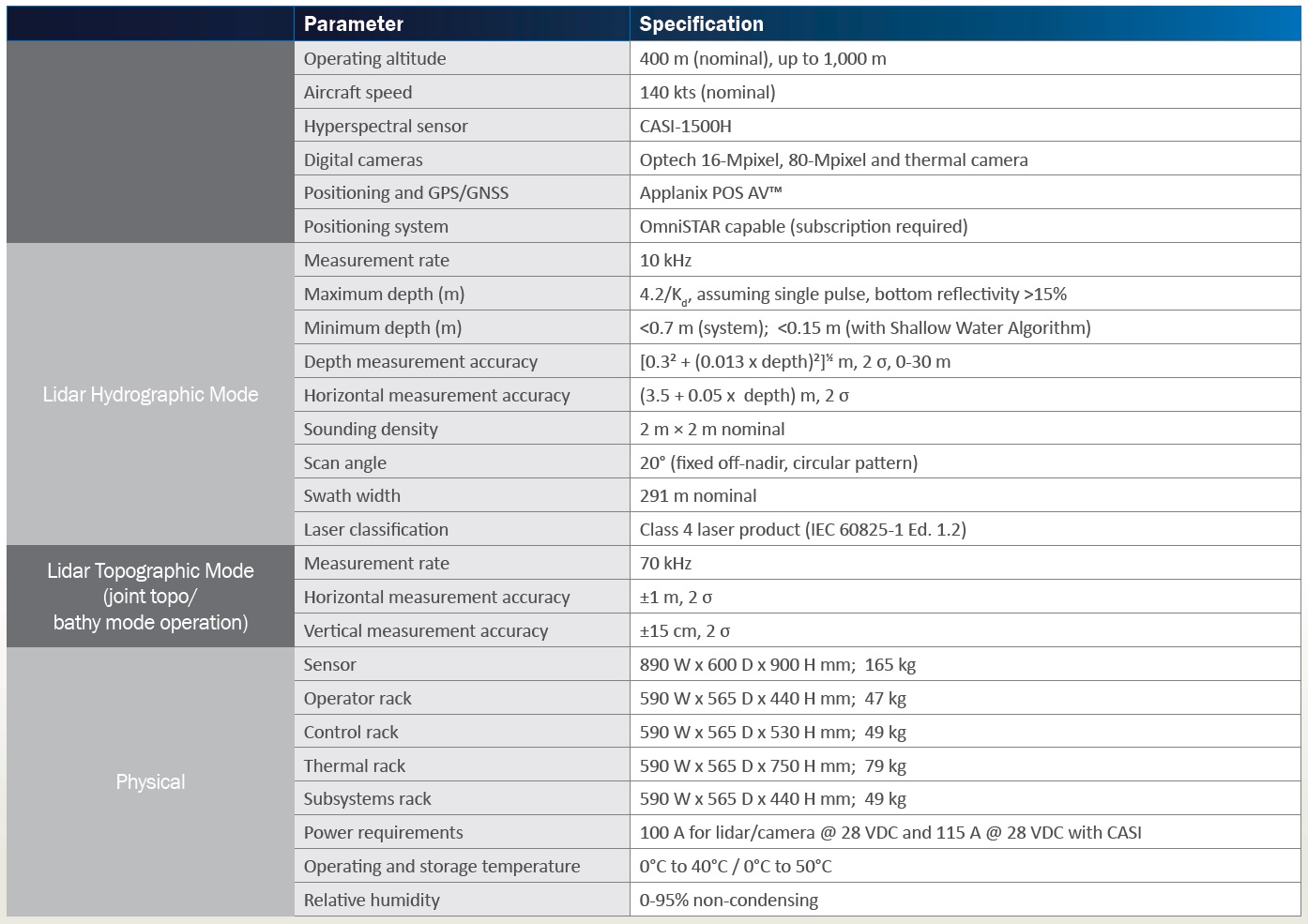
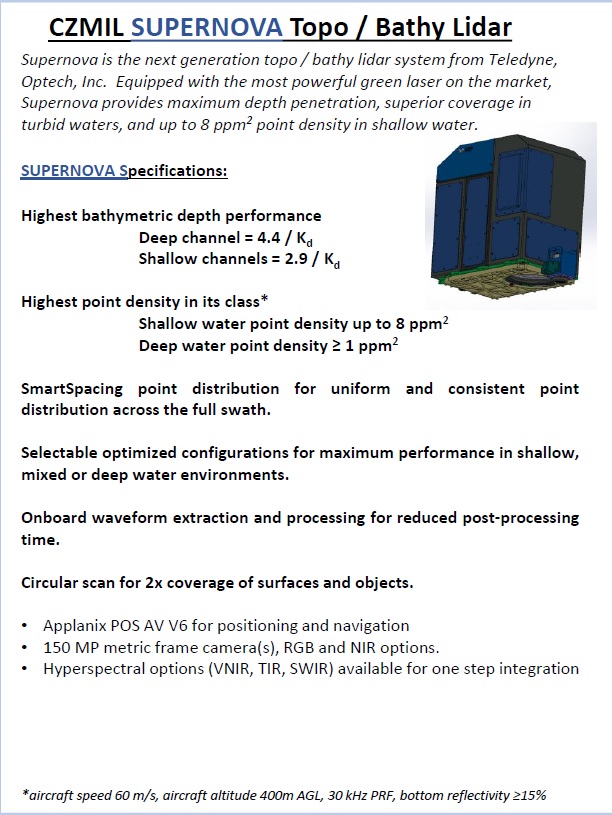
下面两张图分别是CZMIL Nova和SuperNova的技术参数,从图中可以看出,与最大探测深度有关的参数是Kd ,且标称的最大深度4.X/Kd要求底质反射率大于15%。
1、海底底质对测量的影响
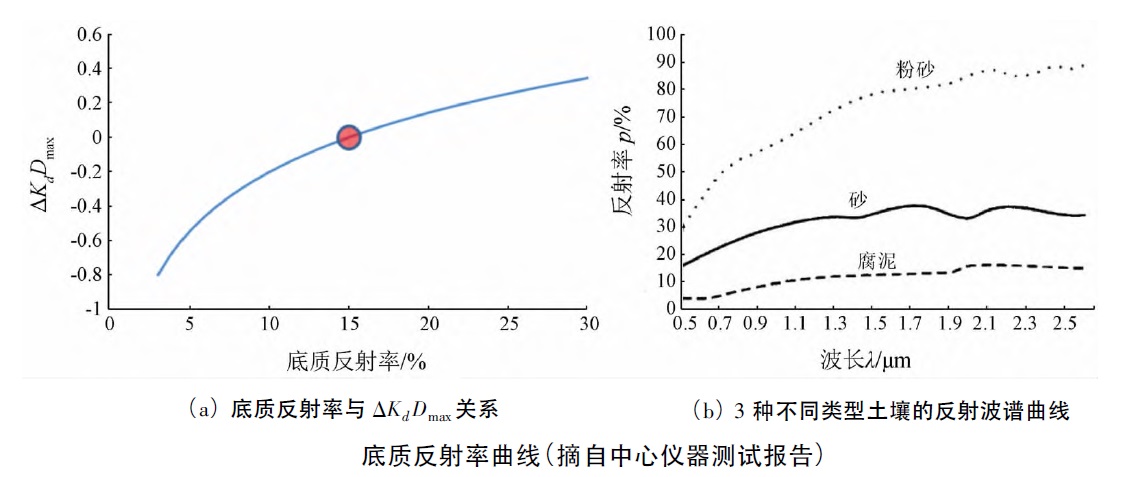
在进行激光测深的时候,海底底质的反射率对测量结果将产生很大的影响。不同区域的底质特征会有很大的差异,这会造成底部反射光强度的不同,给运用激光遥感技术测量水深的精度造成很大的影响。下图(a)为Optech 公司提供的底部反射率与ΔKdDmax的关系,可以看出,在底部反射率降到10% 以后,KdDmax将下降0.2; 在底部反射率为15% 时,对KdDmax无影响,指向“0”( 图中红点处) ,所以CZMIL 系统标称的最大测深计算公式,是在底部反射率达到15% 时才有效。从3 种不同类型土壤的反射波谱曲线( 下图( b) ) 看出,在波长为532 nm 的光谱内,砂( 粗砂) 的反射率大约为15% ; 腐泥( 淤泥) 的反射率约为5% ; 粉砂( 细砂) 的反射率约为30%。因此,当海底为较亮的砂子时,按照公式计算Dmax会比预测较大,若海底为污泥时,Dmax会比预测值小。
不过,相对海底底质而言,海水清澈度对仪器最大测深的影响要重要的多。
2、Kd与最大测深深度
推算最大测深深度有2种方法:
1) 塞克盘深度(( secchi disc depth, SDD) 。塞克盘是指直径30 cm 的白色圆盘。塞克盘深度指在海水中塞克盘恰好不能被人眼辨别时的深度。典型机载激光雷达测深系统中,最大探测深度为圆盘透明度的2~3 倍。
2) 利用水体532 nm 波段的漫衰减系数( Kd( 532) ) 和水体底部反射率来表征,经验计算公式为:
Dmax = n /Kd( 532)
式中: Dmax为最大探测深度; n 为最大测深系数,当海底反射率达到15%的情况下,一般在2~4 之间。
Kd( 532) 越大,激光测深系统的可探测深度越小; 水底反射率越高,激光测深系统的可探测深度越大。根据CZMIL 官方标称:
Dmax = 3.5 /Kd( 532)( 白天) ;
Dmax = 5.0 /Kd( 532) ( 夜间) ,
代入经验公式,计算得到系统在不同清澈度水体白天和黑夜的最大探测深度,见下表,预估设备在测区最大深测能力时可参考。

水体漫衰减系数Kd是水体表观光学量和固有光学量随深度变化的反映。漫衰减系数与水体中的悬浮物、叶绿素、黄色物质含量和成分密切相关,漫衰减系数Kd可用于估算机载激光雷达对水体穿透能力。
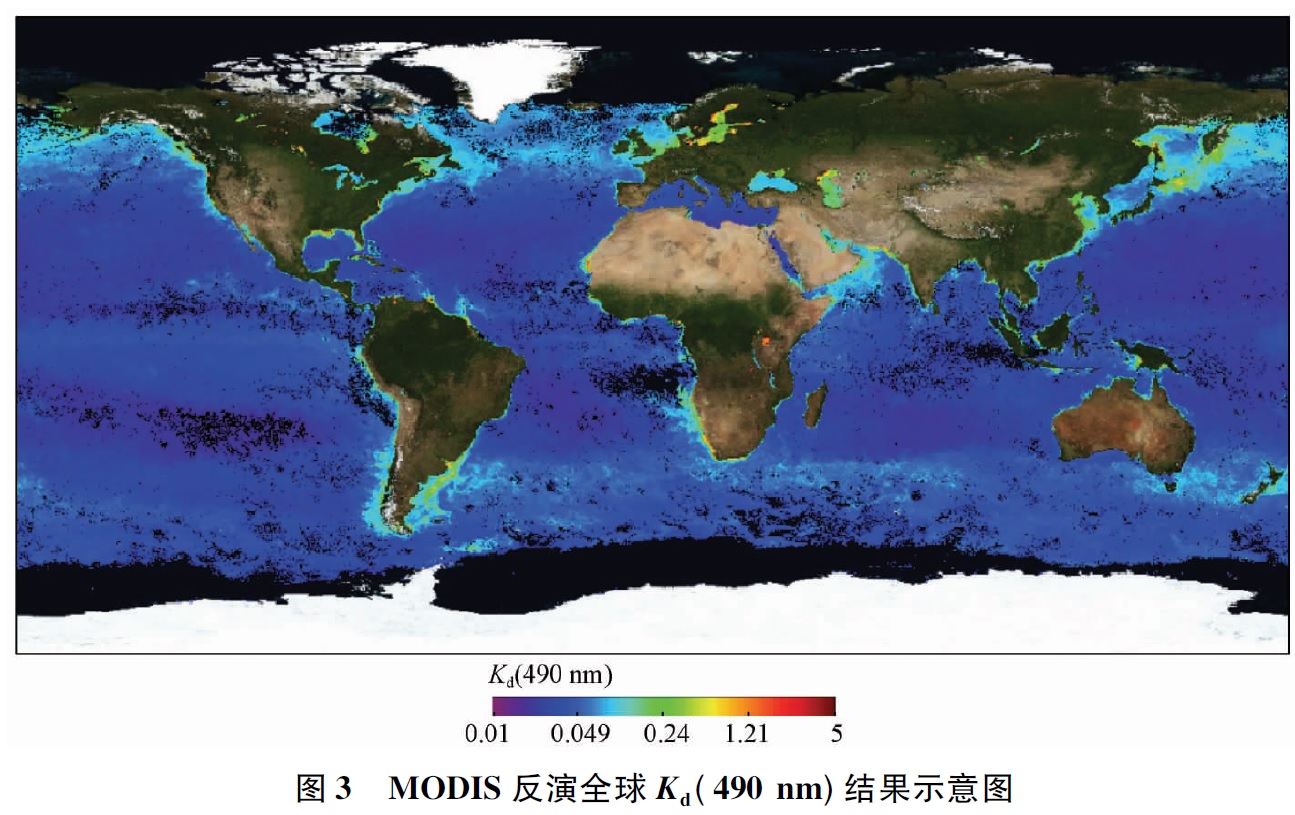
中等空间分辨率成像光谱仪( moderate -resolution imaging spectroradiometer,MODIS) 是美国地球观测系统( EOS) 研发的第3 代海洋水色传感器,有36 个探测波段,从可见光覆盖至热红外。从MODIS 官网可获取AquaMODIS 2014 年10 月平均Kd ( 490 nm) 示意图,如下图所示。从图中可以看出,主要的大型内陆湖泊、沿岸的海域Kd值较大,随向远海过渡Kd ( 490 nm)值逐渐减小。中国海域,沿海污染较重,整体趋势以长江口为界,北方比南方Kd ( 490 nm) 更大。由于影响水体漫衰减系数的固体悬浮物、叶绿素等物质容易受到洋流、季节变化、降雨及海浪等因素影响,Kd( 490 nm) 在不同时间的变化较大。
如果将MODIS的kd(490nm)数据与GEBCO 水深数据作对比分析,推算最大理论测深超过GEBCO( general bathymetric chart of the oceans) 水深数据的区域为潜在可测区,则适合机载激光雷达水深测量开展海陆一体地形测绘的近海区域,主要为海南岛文昌—东方段、北海及雷州半岛东西岸、山东半岛日照—青岛段、辽东湾银州—绥中段。
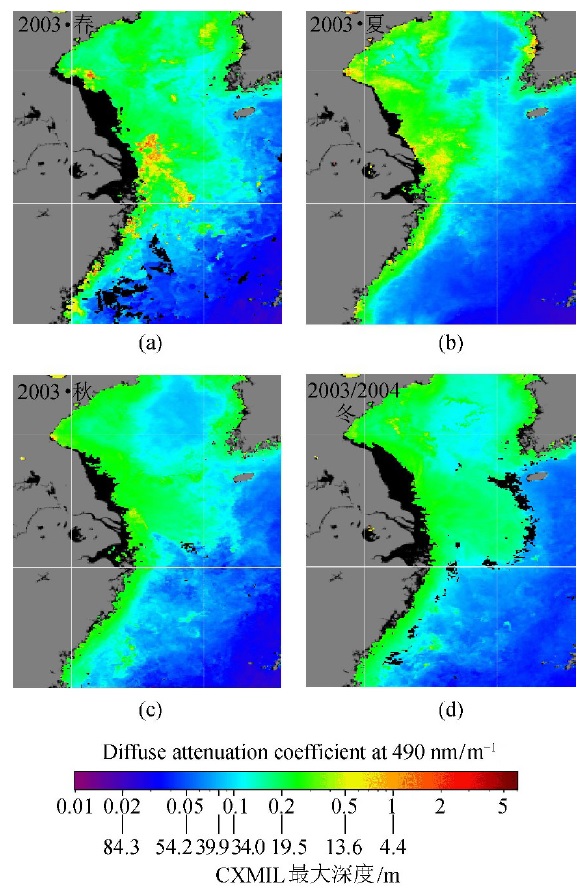
如果有黄海和东海的多光谱实测数据(400nm~700nm),将其与MODIS的kd(490nm)全年数据进行对比分析,获取东海和黄海不同季节Kd(532nm)的最大探测深度,评估CZMIL的作业能力,见下图。结论如下:对于黄海和东海区域,宜在夏季开展激光雷达测深作业,CZMIL 测深在10~75 m 间。其中黄海区域测深10 ~ 50 m,而黄海区域平均水深50m,可以初步判断CZMIL 在夏季对黄海区域进行测量是可行的。东海区域最大测深可达75 m 左右,而东海水深较深,平均水深为350 m,其中大陆架以内的部分平均水深72 m。因此,可以考虑使用CZMIL 对东海大陆架以内的近海区域进行测量。
3、气象条件影响
机载激光雷达测深能力还会受到测区水体周围环境影响,如风浪、雨雪、云雾、赤潮等。大风引起的海浪等同于浑浊水体,海浪打到岸边会形成白涌浪( 白色的泡沫) ,光在气泡里面不停折射,能量极大损失,无法穿透泡沫达到海底。因此,在一些近岸沙滩( 易起碎浪) 和悬崖处,在浪大的时候用激光测量海底点易丢失。
另外,赤潮也是一个影响激光采集的因素,赤潮是海水中某些浮游植物、原生动物或细菌爆发性增殖或高度聚集而引起水体变色的一种有害生态现象。由于水中浮游生物/藻类的生长,导致系统可能无法穿透这些藻类,并将这些生物/藻类的特征反映到点云,形成水中的噪点层。
因此,在激光雷达测深作业前,需要综合考虑天气、气候等因素,并非任何水域都能得到理想的测深结果,避免大风大浪时开展飞行作业,才能保证海陆一体地形测量的连续性。
参考文献:
CZMIL机载LiDAR测...黄海和东海作业能力初步分析_隆华平
基于CZMIL_Nova的...带机载激光雷达测深潜力分析_李奇
基于CZMIL测深技术的海陆一体地形测量初探_吴芳
http://www.gstdubai.com/lidar/czmil.html
supernova-productsheet-specifications-01-27-2021
以上是关于遥感测深方法综述机载雷达测深系统关键参数的主要内容,如果未能解决你的问题,请参考以下文章